無人駕駛時代,還有哪些短板要補齊
2020-06-30 14:32:37薛山
電腦報 2020年18期
薛山
就在五一節前,高德地圖與自動駕駛公司AutoX共同啟動無人駕駛網約車RoboTaxi項目,并在上海嘉定區開啟招募活動,可按呼叫普通網約車的操作呼叫無人車,在指定許可自動駕駛范圍內免費體驗,體驗期結束后,項目將正式上線。
諸多限制之下的蹣跚起步
假設技術已經達到理想狀態,在這種前提下無人駕駛優點非常多,首先是免去了駕駛負擔,車輛會自動判斷路況、車況、車間互聯等,并嚴格恪守交通法規,安全性大幅提升。對乘客而言,路程規劃透明且嚴格按此執行,同時車內接觸人員相對更少,女性乘客夜間乘車也無需再擔心司機素質的問題。
事實上AutoX也并不是國內無人駕駛車輛的第一例,在今年4月中旬,百度自動駕駛項目Apollo Robotaxi阿波羅智行服務就在長沙梅溪湖和洋湖區域開放運營,它們的共同點都是基于自家地圖導航體系,但因為自動駕駛需要非常周全的路政配套基建,所以目前的自動駕駛路線都有嚴格的限制,記者試乘時就發現叫車后它并沒有按照最近路線行駛到接駕位置,而是稍有繞路,并且兩次在同一地點測試均為此線路。
除此之外,這些自動駕駛網約車都配備了安全員,一來是監測數據,二來是對萬一出現的緊急狀況進行人工干預。整個乘車過程都遵循了道路限速,并準確識別了紅綠燈和前后車狀態,能在正確的節點就行變道、超車、并道等操作,整個體驗還是很順暢的,但記者也注意到,目前的自動駕駛落地項目要么選擇在路況本身就很好的地段,要么運營時間避開了早晚高峰,所以大家關心的擁堵路況會如何還無可知曉。
事實上早在2年前的2018年5月1日,我國《智能網聯汽車道路測試管理規范(試行)》就已實施。按照規定,自動駕駛包括有條件自動駕駛、高度自動駕駛和完全自動駕駛。車輛上路測試前須在封閉道路與場地進行實車測試,經第三方檢測機構認證并領取臨時號牌后方可上路。測試車輛要張貼“自動駕駛測試”字樣,只能在指定路段開啟自動駕駛模式。顯然,無論高德AutoX還是百度Dutaxi,都屬于這一階段。
與此同時,測試車輛須全程搭載自動駕駛安全員,在測試過程中,當安全員發現車輛處于不適合自動駕駛狀態或系統提示需人工操作時應及時接管車輛,這也是符合規定所述的,而測試期間一旦出現違法或事故,由公安機關交通管理部門按照現行道路交通安全法律法規對安全員進行處理。所以這一階段的自動駕駛仍屬于非常原始的階段,但至少是從實驗室落到了實地,仍然算得上質的突破。
車聯網將是另一大基建重點
大家應該都聽說過多車連續追尾事故,跟車近當然是關鍵原因之一,但人在這種情況下的反應偏慢也是重要因素,數據表明,一般的人類駕駛員從觀察到前方突發障礙到踩下剎車踏板平均需要1.6秒,而且隨年齡和注意力狀態的變化而變化,這意味著即便是50公里的時速,車輛在反應時間內也會向前行駛超過20米,更何況高速路段的時速往往遠高于此,而如果將此交由激光雷達或攝像系統的自動駕駛來處理,將會縮短到0.5秒,也就是50公里時速時前行7米就能進行制動,再加上路上行駛的車輛眾多,所以,車聯網的覆蓋越廣、吞吐量越大、延遲越低,就越有利于安全行車,而目前來看對此最有前景的技術就是5G通信標準。
在很長一段時間都可能將會是無人/有人駕駛混合的大環境下,阿里巴巴就曾倡議修建針對無人駕駛汽車的專用封閉式公路、廠區或景區,在這樣的場景下車載5G通信設備可利用其10~20Gbp/s的高帶寬、每平方公里100萬個連接點的高并發,以及毫秒級的低延遲特性來動態采集并傳播車輛行駛、路況、天氣信息并有針對性地進行行車規劃,這樣一來所有車輛都行駛在高速、穩定、低能耗且安全系數更高的狀態下,可大大降低物流成本。
在城市道路設計上,5G的技術優勢可以實現路況事實分析并動態調整交通信號燈的時長,結合電子燈牌系統也能對路口車道進行動態規劃,比如四車道的單條左轉車道擁堵,在不明顯影響后續道路路況的情況下,就能動態調整為雙左轉車道。
技術突破兩步走:先搞定車載硬軟件系統
很明顯,從有條件自動駕駛升級到高度自動駕駛乃至完全自動駕駛首先需要掙脫“人”的因素,也就是擺脫安全員也能獨立上路,這意味著需要大量的傳感器來替代人類的視聽能力,而且行駛途中的路況變化可謂瞬息萬變,因此也需要預存儲大量行車數據,同時還要有超低延遲的車聯網來保證車間數據的互通。第一,也是最重要的自然是解決“看”的問題,事實上早在2006年,美國國防部高級研究計劃局,也就是DAPPA設立的無人駕駛汽車挑戰賽上就出現了激光雷達(LiDAR)傳感器的身影,在2014年《Top Gear》第19季度第5集里主持人詹姆斯·梅就駕駛路虎攬勝與自動駕駛卡車TerraMax來了一場越野較量,后者通過安裝在車頂的機械旋轉式激光雷達作為車輛的“眼睛”,通過發射激光、遭遇障礙物折返所得的時間差來算出距離,形成駕駛環境的3D輪廓,在基座高速旋轉的狀態下實現360°無死角掃描,得到厘米級的高精度圖像。
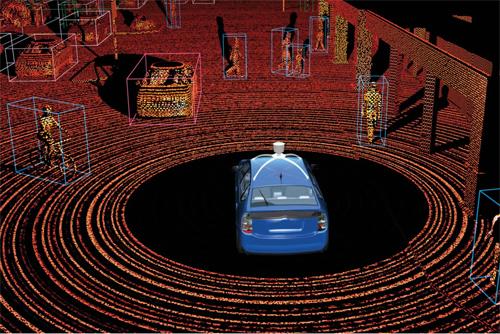
旋轉式激光雷達的機械成本很高,比如此前谷歌無人車的激光雷達成本就高達80000美元,并且靠批量生產堆規模經濟這條路顯然行不通,選擇低性能版又會導致潛在的安全性問題,所以現階段已轉向固態激光雷達方向,簡單來說就是去掉了成本最高的旋轉機械結構,優點是體積小易于集成在車殼內,雖然視野也大幅減小到110°左右,但因為單個成本也大幅下降到250美元甚至更低,所以能夠通過多傳感器的方式來實現全視野覆蓋。
激光雷達可以說是硬件型方案,而以特斯拉為代表的“視覺計算駕駛”則是更偏軟件派,去年發布了基于三星14nm制程打造的Autopilot 3.0全自動駕駛計算機,每秒可處理2300幀數據,并很早就把神經網絡學習部署到了實車當中,簡單來說就是特斯拉收集各種環境、天氣條件數據,也會收集車輛的異常道路表現數據,結合前置毫米波雷達、攝像頭的數據以及神經網絡來對環境進行實時3D渲染,并利用新硬件進行高速處理。
當然,依賴攝像頭也就意味著需要圖像傳感器擁有較好的紅外性能以便于夜間行車,同時也需要高動態范圍來準確辨識大光比環境,比如進出隧道,同時還要有較強的抗閃爍性能,這樣才能準確識別LED交通指示燈,與此同時還要考慮到氣候因素的影響……總體來說這些技術細節近年來一直都在進步,未來可期。
編輯總結
實事求是地說,自動駕駛無論從駕駛還是乘坐的角度來說,或仍將長時間處于有條件自動駕駛或輔助手動駕駛階段,畢竟它牽扯的行業覆蓋面比較大,并不完全是汽車本身,從技術上來看面對復雜路況的穩定性也需要更多的實地測試數據支撐,同時還要等待相應法律法規的繼續完善,屬于未來價值較高的“長期工程”。
