汽車鈑金零部件下料機械手爪的模塊化設計
2020-06-29 07:16:23陳芳
微型電腦應用 2020年5期
關鍵詞:模塊化
陳芳
摘 要:考慮汽車鈑金零部件生產線中的下料任務,實現了真空吸附結合磁力吸附結構的設計。基于此,通過模塊化原理實現工業機械手爪的設計,實現生產線中不同工業下料的工作,利用機械下料實驗對機械手爪可靠性進行了驗證。
關鍵詞:汽車鈑金零部件;下料;機械手爪;模塊化
Abstract:In this paper, the design of vacuum adsorption and magnetic adsorption structure is realized for the blanking task of automobile sheet metal parts production line. Based on this, the design of industrial mechanical claw is realized by modularization principle. The reliability of mechanical claw is verified by mechanical cutting experiment.
Key words:automobile sheet metal parts;blanking;mechanical gripper;modularization
0 引言
在我國沖壓加工技術不斷發展的過程中,其占據機械加工過程中的比重不斷的擴大。沖壓產業發展對于沖壓機工生產工藝不斷的提高,傳統手工送料的方式因為受到速度、精度、安全性的制約,無法滿足現代化生產需求,自動送料結構逐漸代替傳統手工送料。目前,已經不再需要大量勞動力實現生產活動,勞動密集型逐漸轉變成為技術密集型,沖壓自動化生產成為未來沖壓行業主要的發展趨勢。
1 自動化沖壓生產線的對比
1.1 傳統沖壓生產線
傳統沖壓生產線主要包括多個單動機械壓力機構成,將機械手安裝到不同壓力機中,實現加工工位的控制,從而實現工件翻轉。此種上下料方式結合機械及人工,為半機械化流水線。現代,我國大部分沖壓企業都是利用此種方式實現生產。
1.2 柔性自動化送料
此為常規機械手系統及多工位橫桿輸送系統中間的結構,自動化送料較為靈活、簡便、高效。另外,此種系統在大批量及加工方式不變化的生產線中,無法在多品種、小批量產品生產中使用[1]。
1.3 多自由度送料機器人
常見自動沖壓生產線使用穿梭小車式,現代國內沖壓生產線自動化輸送系統都屬于此種方式。此種方式的穩定性標高,但是購買機器人的成本也比較高,價格較為昂貴,速度比較慢,只能夠在大型沖壓行業中使用。
1.4 快速送料機械手
目前,快速送料機械手被廣泛應用到中小沖壓企業中。此種送料方式具有較快的送料速度,還能夠在各種沖壓生產線中使用,具有較為廣泛適用面,滿足我國實際發展需求。但是,此種機械手大部分都是購買與國外,價格比較貴,維修也不方便。國內生產機械手,如圖1所示。
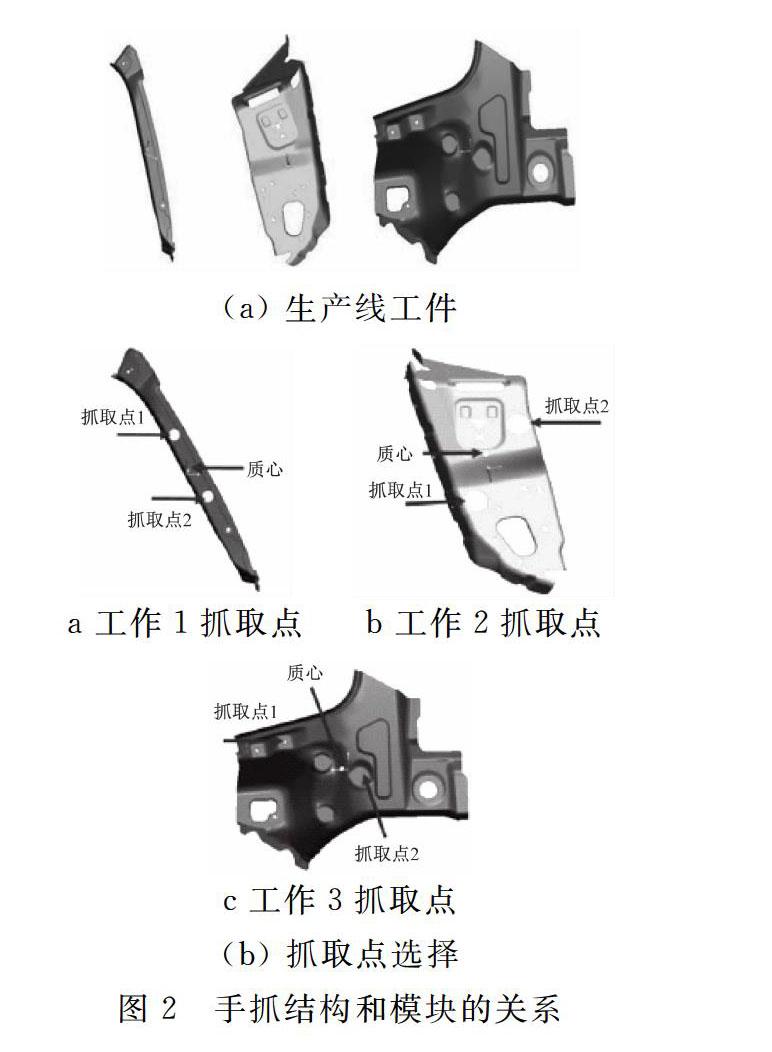
其雖然能夠實現快速的上下料,但是在滑塊中安裝支座,在上下卸料的過程中無法對其穩定性進行保證[2]。為了保證手抓抓取工件時力和力矩的平衡,分別在工件質心兩側尋找合適抓取點,并且兩個抓取點距離分別為180 mm,如圖2所示。
2 機械手結構設計
為了能夠有效定位工件,抓取被加工件到沖壓線中放置實現沖壓,要求旋轉、平移及抓取3個動作為基礎,實現上述動作模型的創建。
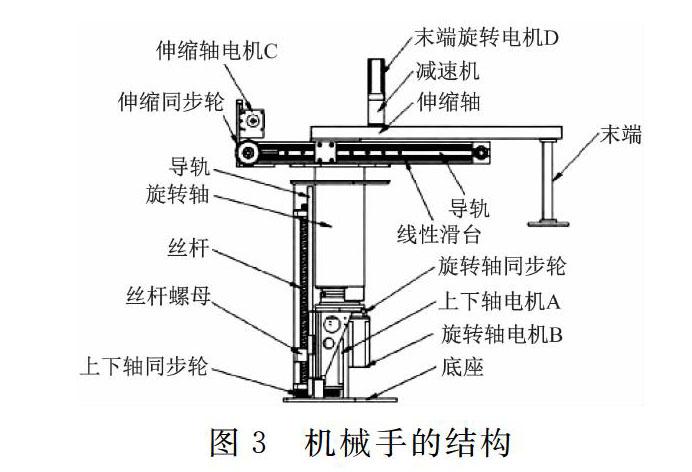
機械手的結構,如圖3所示。
此模型主要包括上下升降、底座、伸縮、中心旋轉和末端。對應地主要包括四個自由度,上下升降軸J1、中心旋轉軸J2、前后伸縮軸J3、末端旋轉軸J4。
上下軸傳動方案利用交流伺服電機促進同步輪實現傳動,并且利用同步帶為同步輪進行傳遞,通過同步輪軸和絲桿連接,從而實現轉動,絲桿螺母和平臺在機械手整體上下升降實現固定。中心旋轉軸電機B使利用同步帶減速連接諧波減速器軸,以此使負載慣量得到降低,使輸入轉矩得到提高,提高控制的進度。伸縮軸電機主要作用就是利用線性滑臺使旋轉運動朝著直線運動進行轉變,末端伺服電機是轉動軸驅動,使其帶動末端進行旋轉,從而在平面內實現末端的定位[3]。
3 機械方案的設計
機械手機械結構主要包括:其一,結構主體通過鋁板、鋁型材構成;其二,在鋁板中安裝30個真空吸盤,不同的真空吸盤中設置控制開關,以吸附工件尺寸實現工作中真空吸盤數量的調節;其三,X軸傳動機構屬于同步帶傳動機構,主要包括上下兩層,利用線性導軌實現導向,機構通過一個伺服電機利用同步帶驅動雙層支臂同時伸縮,設置1 800 mm行程。Y軸傳動機構屬于絲杠傳動機構,固定螺母,絲杠開始運動,設計500 mm行程。
壓力機下料機械手下料節拍為每件4 s,下料的時間較為緊迫,在設計過程中要在4 s中滿足機械手從壓力機外進入到吸附位置的需求,之后使工件搬運到壓力機中[4]。
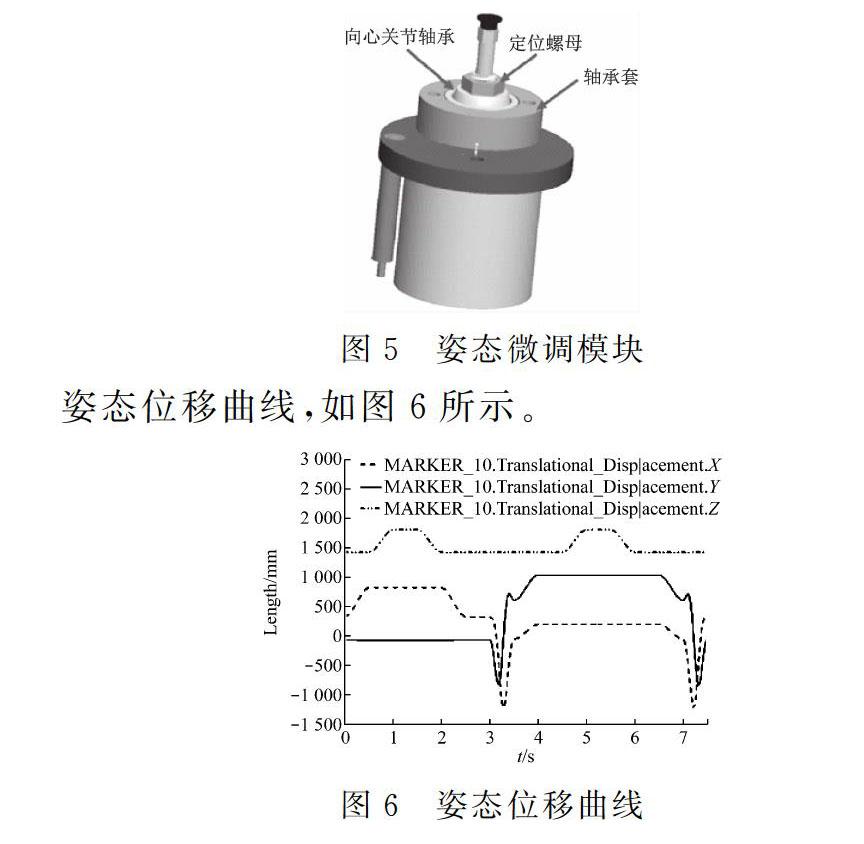
4 末端執行模塊的設計
常見工業機器人中的末端執行器根據握持原理劃分成為夾持類及吸附類兩種,本文在研究過程中的機械手是對于鈑金自動下料設計的,由于鈑金形狀屬于平面直板,對夾持類機械手末端夾持是非常不利的,吸附式手部特點能夠滿足大平面物體需求,鈑金平面直板型形狀能夠滿足此需求,那么本課題使用機械手末端執行器作為吸附類手部。工業過程中所使用的吸附類末端執行器根據不同的吸附原理劃分成為氣吸式及磁吸式兩種。
其一,吸附式。氣吸式末端執行器屬于工業中較為常見的吸持物件裝置,主要包括進排氣系統、吸盤及吸盤支架,其工作原理就是通過真空吸盤中內外氣壓差將工件吸氣。氣吸使用較為便捷,重量比較輕,不會污染環境,機械結構較為簡單。氣吸式末端執行器能夠在非金屬材料中使用,所以對于被吸持工件預定輸送位置誤差并沒有較高的要求,但是要求吸附物料平整順滑,被吸工件沒有漏氣及孔洞[5]。
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
裝備制造技術(2021年2期)2021-07-21 05:38:44
現代裝飾(2020年5期)2020-05-30 13:01:56
汽車與新動力(2019年5期)2019-11-07 05:20:16
系統管理學報(2018年3期)2018-08-13 01:05:42
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(2017年4期)2017-06-21 06:29:52
流程工業(2017年4期)2017-06-21 06:29:50
石油化工建設(2015年2期)2015-12-01 04:16:44
中國教育技術裝備(2015年10期)2015-03-01 02:41:05