智能鋪設地磚機器人設計
2020-06-29 07:16:23史春笑毛厚昌譚澤德歐健威葛宏翔
微型電腦應用 2020年5期
史春笑 毛厚昌 譚澤德 歐健威 葛宏翔

摘 要:設計一款智能鋪設地磚機器人。該機器人以GOT1050觸摸屏為上位機,以三菱 FX3U型PLC為控制器,通過控制相關電機和真空吸盤工作,實現(xiàn)自動鋪設地磚功能。該機器人具有手動、單循環(huán)、連續(xù)、回原點等操作模式,功能齊全,實用性強。
關鍵詞:機器人;觸摸屏;PLC;電機;地磚
Abstract:An intelligent tile laying robot was design. The robot uses GOT1050 touch screen as the upper computer, Mitsubishi FX3U PLC as the controller. It realizes the function of automatically laying floor tiles by controlling the relevant motors and vacuum suction cups. The robot has manual, single cycle, continuous, returning to the origin and other operation modes. It has complete functions and strong practicability.
Key words:robot;touch screen;PLC;electric machinery;floor tile
0 引言
目前,在建筑行業(yè)中普遍采用人工手動鋪設地磚,這種鋪設方式工作效率低,且隨著地磚的尺寸逐漸增大,人工鋪貼的勞動強度也越來越大,影響工人身體健康[1],而且不能保持穩(wěn)定的鋪設質量。因此,研制自動鋪設地磚機器人,解決人工鋪設地磚時存在的一系列問題,對提高鋪設質量和效率至關重要。
1 系統(tǒng)總體設計
智能鋪設地磚機器人控制系統(tǒng)由下位機和上位機兩部分組成。下位機由硬件和軟件兩部分組成,其中硬件部分主要由PLC、傳感器、主令電器、步進電機、振動電機、推桿電機、真空吸盤等組成;軟件部分主要包括主程序、連續(xù)運行程序、單周期運行程序等;上位機由觸摸屏和軟件GT Designer2兩部分組成。系統(tǒng)原理框圖[2],如圖1所示。
2 系統(tǒng)硬件設計
2.1 系統(tǒng)結構框圖
系統(tǒng)結構框圖,如圖2所示。
2.2 移動支架設計
支架結構設計。該機器人的支架結構按照能鋪設長×寬分別為30 mm×30 mm和40 mm×40 mm兩種不同規(guī)格尺寸的地磚進行設計。因要完成在一個區(qū)域內鋪設兩行三列地磚的工作,所以支架底面最小的有效空間為長120 cm、寬80 cm,再加上地磚的取料區(qū)、電氣控制柜的安裝區(qū)及要預留的空間,最終該支架的有效空間尺寸設計為長130 cm、寬135 cm、高35 cm,鋪設區(qū)域長130 cm、寬90 cm,取料區(qū)長45 cm、寬45 cm,安裝電氣控制柜的區(qū)域長85 cm、寬45 cm。
支架轉移定位的實現(xiàn)。當該機器人鋪完一個區(qū)域的地磚后,能自動轉移到下一個區(qū)域進行鋪設。根據該機器人的工作環(huán)境及支架結構特點設計支架向右邊轉移,其傳動機構安裝在支架的右邊。該模塊由輪子、軸承、軸芯、齒輪、鏈條、步進電機等組成。
2.3 機械臂設計
機械臂結構設計。機械臂采用三根滾珠絲杠作為傳動機構,分別作用在X軸、Y軸和Z軸,使機械手在一定區(qū)域內能進行精準定位。其主要由行程開關、兩組X軸移動平臺、一組Y軸移動平臺、一組Z軸移動平臺和3臺步進電機組成。行程開關分別安裝在XYZ三軸滾珠絲杠有效行程的兩端,并各預留一段行程空間,主要用于故障時保護滾珠絲杠及整個工作平臺[3-4]。
機械臂定位的實現(xiàn)。由PLC控制電機的轉動步數,由絲杠把旋轉的運動狀態(tài)轉換為直線運動狀態(tài),其步數乘以絲杠的導程就得到了機械臂移動的距離,最終完成機械臂精準定位的目的。設計時采用適合的電機驅動器,按照程序寫好的脈沖規(guī)律控制步進電機各相繞組的通斷。
2.4 機械手設計
機械手結構。該機器人使用真空吸盤機械手,主要起到吸持、傳遞、脫開地磚及聯(lián)合振動機對地磚進行夯實的作用。該機械手由空氣壓縮機、調壓閥聯(lián)件、電磁閥、真空發(fā)生器、真空吸盤、氣管、行程開關及振動機等組成[5]。在設計中為了配合真空吸盤的使用,選取能產生0.7~0.8 MPa氣源的空氣壓縮機。真空吸盤機械手的結構,如圖3所示。
機械手功能實現(xiàn)。為了使機械手穩(wěn)固地吸取地磚,并聯(lián)安裝兩個真空吸盤,且在吸盤上面裝有振動機作為夯實地磚的動力源[6]。在兩個吸盤之間的間隙中安裝一個與吸盤同一個水平面的行程開關,目的是使機械手在取料區(qū)能更方便的吸取地磚,而不需要在取料區(qū)設計傳送帶把地磚傳送到固定的位置。
2.5 支架調整模塊設計
支架水平度檢測。采用激光對射傳感器檢測支架水平調整信號,它分為發(fā)射器和接收器兩個部分,發(fā)射器和接收器在同一直線上,且彼此分開,當發(fā)射器所產生光線被阻擋住的時候,接收器就不能接受到該光線[7]。將3組發(fā)射器都安放在支架右上角,分別射向安裝在支架左上角的接收器(1)、左下角的接收器(2)和右下角的接收器(3),且它們都安裝在同一水平面上,此時接收器接收到信號,輸出低電平0。當支架向一邊傾斜時,接收器和發(fā)射器不在同一水平面上,接收器接收不到信號,輸出高電平1。
支架水平度調整。當支架從一個區(qū)域轉移到另一個區(qū)域后,要對支架進行水平度的調整。設計時采用中間繼電器(K8、K9、K10、K11、K12、K13、K14、K15)驅動推桿電機動實現(xiàn)對支架水平度的調整。
2.6 控制面板設計
為方便操控機械手,設計控制面板,如圖4所示。
2.7 系統(tǒng)電氣接線圖
智能鋪設地磚機器人的電氣接線圖見附錄所示。
2.8 機器人實物圖
鋪設地磚機器人實物圖,如圖5所示。
3 系統(tǒng)軟件設計
軟件設計是智能鋪設地磚機器人的核心,本設計采用三菱PLC較常見的編程軟件GX Developer進行編程。本文主要介紹機器人的自動模式程序設計。
3.1 系統(tǒng)程序流程圖
機器人具有手動操作、返回原位操作、自動操作三種操作模式,在自動操作模式下又設計了單循環(huán)操作和連續(xù)操作。采用選擇性分支設計步進梯形圖,通過條件設定,實現(xiàn)4種操作模式的選擇。系統(tǒng)流程圖,如圖6所示。
3.2 主程序設計
主程序是整個系統(tǒng)程序的主體,包括系統(tǒng)起動、暫停、停止以及切換到各模式的程序。主程序中使用狀態(tài)初始化指令IST可以簡化程序,IST指令設定了3種操作方式,分別用S0、S1、S2作為這3種操作方式的初始狀態(tài)步。S0:手動操作方式;S1:返回原位操作方式;S2:自動操作方式,上述三種方式的輸入控制信號由X20~X27共8點輸入信號設定[8]。
3.3 連續(xù)運行與單循環(huán)運行程序設計
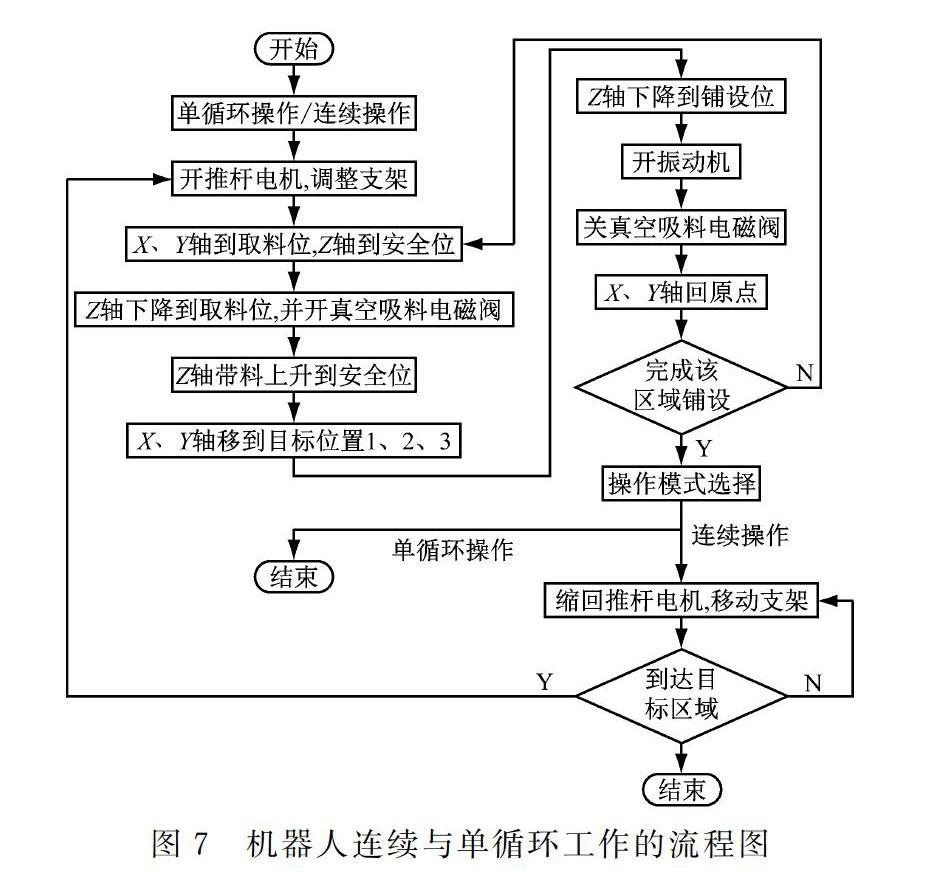
自動模式包括連續(xù)、單循環(huán)兩種運行模式。連續(xù)模式是指完整地鋪設完一個工作區(qū)域的地磚后轉移到下一個工作區(qū)域繼續(xù)鋪設,可連續(xù)鋪設若干個工作區(qū)域;單循環(huán)模式是指完整地鋪設完一個工作區(qū)域的地磚后停止工作,等待命令。連續(xù)與單循環(huán)工作流程,如圖7所示。
4 觸摸屏設計
采用三菱GOT1050觸摸屏作為人機界面,利用軟件GT Designer2設計觸摸屏界面。
4.1 建立工程
通過新建工程向導,快速完成工程設置。選擇GOT類型為GT10**-Q(320x240),橫向放置,256色。選擇GOT連接機器,制造商選三菱電機,機種選MELSEC-FX,選標準I/F(標準 RS-422),選擇“MELSEC-FX”的通訊驅動程序,默認選擇MELSEC-FX驅動,最后確定各項選擇是否正確,完成建立工程。
4.2 設計界面
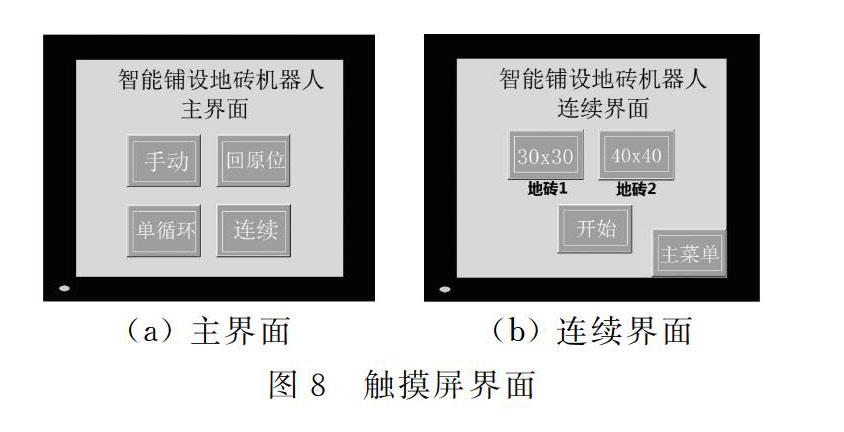
界面設計包括主界面、手動、回原位、單循環(huán)、連續(xù)等5個界面設計,后4個界面對應著各自的操作模式,界面之間可以切換。每個按鈕都對應著相應的軟元件觸頭,實現(xiàn)觸摸屏對PLC的控制。主界面和連續(xù)界面,如圖8所示。
主界面中手動、回原位、單循環(huán)、連續(xù)四個按鈕是用來選擇與四種操作模式對應的程序;連續(xù)界面中30×30、40×40按鈕是用來選擇鋪設不同規(guī)格地磚的程序,開始和主菜單按鈕是分別用來啟動鋪設相應規(guī)格地磚的程序和返回主界面。
4.3 定義變量
在觸摸屏設計時,通過設定參數代替實體按鈕,可節(jié)省PLC I/O口,簡化系統(tǒng)硬件布線。變量定義如下:X20-系統(tǒng)手動模式選擇按鈕,X21-系統(tǒng)返回原位模式選擇按鈕,X23-系統(tǒng)單循環(huán)模式選擇按鈕,X24-系統(tǒng)連續(xù)模式選擇按鈕,X25-系統(tǒng)手動模式下回原位按鈕,X31-系統(tǒng)手動模式下方向信號輸入,X32-系統(tǒng)手動模式下脫機信號輸入,X33-系統(tǒng)手動模式控制X軸電機的中間繼電器輸入,X34-系統(tǒng)手動模式控制Y軸電機的中間繼電器輸入,X35-系統(tǒng)手動模式控制Z軸電機的中間繼電器輸入,X36-系統(tǒng)手動模式控制電磁閥輸入,X37-系統(tǒng)手動模式控制振動機輸入。
4.4 動畫設計
動畫設計包括按鈕設置和畫面切換。通過對按鈕的圖像變化突出按鈕狀態(tài);通過設置不同的功能,切換不同的畫面。
5 總結
智能鋪設地磚機器人通過運用PLC技術、氣動技術、機械技術及電氣技術設計機器人主體結構,使用GX Developer軟件進行編程,基于GT Designer2軟件設計觸摸屏界面,為鋪設地磚機器人完成手動、單循環(huán)、連續(xù)、回原點操作打下堅實基礎,提高了地磚鋪設質量和效率。
參考文獻
[1] 趙剛.直角坐標式地磚鋪貼機的設計研究[J].機電技術, 2015(6):31-32.
[2] 溫杰,史春笑,毛厚昌,等.基于PLC智能鋪設地磚機的機械手設計[J].發(fā)明與創(chuàng)新,2008(7):29-31.
[3] 劉燕,鄒萍,管文娟.基于PLC的三軸機械手控制系統(tǒng)的設計與實現(xiàn)[J].制造業(yè)自動化,2016:38(7):21-24.
[4] 李剛,周文寶. 直角坐標機器人簡述及其應用介紹[J].伺服控制,2008(9):72-75.
[5] 楊密.氣動機械手的 PLC 控制系統(tǒng)設計[J]. 裝備制造技術,2015(2):183-184.
[6] 司震鵬,曹西京,姜小放. 真空吸附式機械手系統(tǒng)設計[J].包裝與食品機械,2009,27(6):26-30.
[7] 周志敏.光電檢測裝置應用中的問題分析[J].電子元器件應用,2003,5(5):40-42.
[8] 王阿根.電氣可編程控制原理與應用[M].(第3版).北京:清華大學出版社,2016:259-263.
(收稿日期:2019.09.23)
猜你喜歡
兒童故事畫報·發(fā)現(xiàn)號趣味百科(2025年8期)2025-08-23 00:00:00
中學生天地(A版)(2022年10期)2022-11-23 06:42:50
保健醫(yī)苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
模具制造(2019年3期)2019-06-06 02:10:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商業(yè)評論(2014年9期)2015-02-28 04:32:41
航天器工程(2014年5期)2014-03-11 16:35:55