基于stm32的農業采摘機器人設計與實現
2020-06-29 07:16:23包軍民支雙雙余有江
微型電腦應用 2020年5期
包軍民 支雙雙 余有江

摘 要:為了緩解隨著城市化進程的加快,農村人口老齡化的加重,導致從事農業服務的人越來越少,農業勞動成本越來越高的壓力,綜合各種因素,設計并實現了這款農業采摘機器人,致力于最大化的將人從繁重的勞動中解放出來。機器人采用STM32作為機器人的核心控制系統,用直流編碼電機和H橋驅動作為機器人的動力系統,用PWM調速方法來控制機器人速度,再加之以三軸姿態陀螺儀傳感器和灰度傳感器協調工作作為機器人的定位系統,當機器人到達特定位置后,控制機械臂和機械抓進行采摘果蔬并且收集起來。經測試,該款機器人較好的解決了果蔬采摘耗時、耗力、季節性強等重要影響因素對果蔬經濟的影響。提高了采摘作業完成的質量,增強了其經濟效益與市場效益。這款基于STM32的農業采摘服務機器人可以有效快速的完成采摘作業,實現了在誤差允許范圍內精確的停車和果蔬采摘,性能穩定,工作效率高,在后期加以進一步的研究后,有望投于市場中大規模生產。
關鍵詞:檢測控制;農業服務;采摘機器人
Abstract:In order to alleviate the pressure of fewer people engaged in agricultural services and increasing agricultural labor costs due to the acceleration of urbanization and the aged tendency of population, an agricultural harvesting robot is designed and implemented to maximize the liberation of people from heavy labor. STM32 is used as the core control system of the robot, DC-coded motor and H-bridge drive are used as the power system of the robot, PWM speed control method is used to control the speed of the robot, and coordinate work of three-axis gyroscope sensor, and gray sensor is used as the positioning system of the robot. When the robot reaches a specific place, it manipulates its mechanical arms and grips to pick fruits and vegetables and collect them. The tests has shown that the robot can effectively solve the problems of fruit and vegetable picking economy caused by time-consuming, energy-consuming, seasonal and other important factors. The robot can improve the quality of harvesting operation, and enhance its economic and market benefits. This STM32-based agricultural picking service robot can effectively and quickly complete the picking task by realizing precise parking and finishing the picking within the allowable range of error. With its stable performance and high efficiency, after further research in the later stage, the robot is expected to be put into mass production in the market.
Key words:detection control;agricultural service;harvesting robot
0 引言
眾所周知,我國是農業大國,果蔬種植面積廣大,品種繁多,果蔬采摘是農業生產鏈中最耗時耗力的一個環節,其成本高、季節性強、需要大量勞動力高強度的工作。而最具智慧的人恰恰是農業勞動的中堅力量,在當今科學技術迅猛發展的情況下,實現農業的技術化、機械化成了刻不容緩的問題。在近幾年經濟高速發展的推動下,農業機械化已經得到了大規模的實現,但這在當中,科學技術的含量還是遠遠不夠,依然沒有把農民從傳統的以人為中心的勞作中解放出來。其次,由于工業生產的迅速發展,分流了大量農業勞動力以及人口老齡化加劇等原因,使得能夠從事農業生產的勞動力越來越少,單靠人工勞作已經不能滿足現有的需要[1]。自1968年美國學者Brown和Schertz提出以來,果蔬采摘技術就一直不斷發展著,1983年第一臺番茄采摘機器人在美國誕生,并且隨著算法的成熟和果蔬識別系統與圖像處理技術的完善,加以人工智能的提出,使得果蔬采摘機器人的研究越來越成熟,美國、法國、意大利、日本、西班牙等國在這方面的研究遙遙領先與中國,取得了斐然的成績,但由于果園氣候、天氣、濕度、
溫度、地形等諸多因素都變化莫測,導致對采摘機器人有特殊的要求,目前市場上還沒 有完善的可以量化生產的并且可以采摘多種果蔬的機器人[1]。國內對于采摘機器人的研究更是遠遠落后于其他國家,而集體農莊已成為一種不可阻擋的潮流,對采摘機器人的要求將極為迫切[2-3],我國必須大力發展科學技術產業。在德國工業4.0,美國工業互聯網的驅動下,我國提出中國制造2025。這就要求每一個社會主義接班人都必須牢記自己的使命,并努力為之奮斗。
基于上述背景,通過分析目前我國農業勞動的狀況,設計并且制作出了這款基于STM32的農業采摘機器人。該機器人用的STM32作為主控芯片,大大提高了系統的反應速度和處理能力;并且裝配有大扭矩金屬舵機,避免了機械臂扭矩不夠的問題;此外,采用前后雙排傳感器進行路線矯正,極大的提高了機器人行走的穩定性和定點的準確性。機器人在模擬果園中進行測試,并且獲得了初步成效,模擬果園如圖1和圖2所示。
模擬果園場地為平整硬質木板,上鋪綠色地毯,周圍有高 20CM 高的一體化圍墻,由A,B,C,D四個區域構成:
(1) A 區模擬基礎設施完整的現代化果園、菜地,有 3 個果實,3 個蔬菜,在 A區的中心線上,有機器人行走引導線。在果實與蔬菜的收獲實施地點A2、A3、A4,有采收地點提示線。
(2) B 區模擬基礎設施不太齊全,或者輔助采摘設備發生故障后的現代化果園、菜地,有 3 個果實,3 個蔬菜,在 B 區的中心線上,有機器人行走引導線。在果實與蔬菜的收獲實施地點 B2、B3、B4,沒有采收地點示意線,虛線只是表示其方位,實際場地中不存在。
(3) C 區模擬基礎設施不齊全,或者輔助采摘設備發生嚴重故障后的現代化果園、菜地,有 3 個果實,3 個蔬菜,沒有機器人行走引導線,虛線只是表示其方位,實際場地中不存在。在果實與蔬菜的收獲實施地點 C2、C3、C4,有收獲地點提示標志。
(4) D 區模擬開放的菜地、果園,沒有機器人行走引導線,且比 A 區、B 區、C區要高。D 區有 16 個放置蔬菜的地點。
模擬果園與普通果園主要有一下幾點區別:
(1) 模擬果園里面的模擬果樹沒有過多的枝條,與實際果樹錯落繁雜的樹枝有一定差距。
(2) 模擬果園當中的蔬菜直接放在地表,而不是埋在地下。
(3) 模擬果園除了有4個陡坡以外,其他地方都比較平坦。
(4) 模擬果園缺少實際果園中其他不定環境因素的影響。
雖然模擬果園與普通果園有諸多差異,但與管理良好的現代化果園相似程度較高,機器人測試的數據可靠。
1 系統整體設計
機器人的整體系統主要由控制系統、電源系統、尋跡系統、采摘系統、動力系統5部分組成。控制系統的主要作用是控制機器人的各部分協調、穩定的工作,采用STM32控制板,可以給機器人提供充足的控制端口,通過控制板向機器人各部分發送指令,實現一指令一運動的準確控制。
機器人的電源系統目前由12伏3300毫安的航模電池組成,用于為系統各個部分提供所需的電壓,盡力使各個模塊都在額定電壓下工作,隨著后期的發展改進,航模電池可以由蓄電池代替。
尋跡系統是機器人行動的關鍵部分,要很準確的控制機器人穩定行走,不能出現任何偏差,主要由二值灰度傳感器和三軸陀螺儀傳感器組成。在模擬果園中,二值灰度傳感器主要用在有標志線和停車標志的地方,其識別迅速,傳值穩定,是尋跡的不二選擇;三軸陀螺儀傳感器主要用在角度轉彎的地方,用于解決特定角度停車的難題。
采摘系統負責機器人果蔬的采集和收集任務,純鋼機械臂加上大扭矩舵機,再配備16路舵機控制板,能夠準確高效的完成果蔬采集收集的任務。
動力系統用于實現機器人在溫室內的自由移動,由減速電機、H橋直流電機驅動和金屬輪組成,三部分協作實現機器人的前進、后退和轉彎。系統整體結構如圖3所示。
2 硬件設計
機器人的硬件系統電路,如圖4所示。
圖4通過C語言編程來將指令寫入主控板中,主控板通過代碼發送信號給各個模塊,使各個模塊協調穩定的工作。
首先,發送指令給電機模塊,使機器人先運動到指定的位置,在這個過程中,配合給尋跡模塊發送指令,使機器人能尋跡前行,自我修正路線;等機器人穩定到達后,主控板再發送信號給舵機控制板,控制采摘模塊抓取果實與蔬菜;等指定位置的果蔬收集完畢后,機器人按照指令前往下一個收集點。
2.1 電機模塊
電機驅動采用大功率H橋直流電機驅動,其采用大功率NMOS管,且帶200 mA的5 V電源輸出,可方便控制板供電,實現單電源操作,其上有5個可供用戶使用的引腳。
如表1所示。
其5個引腳功能為:A1與A2控制電機的狀態,其邏輯功能見表1;PA為PWM波輸入(電機速度調節);G為與控制板共地引腳;5 V為200 mA的控制電壓輸出,電機采用AB雙相增量式磁性霍爾編碼電機,其好處是自帶上拉整形電阻,可與單片機直連。直流電機的轉動慣量相對較小,容易控制,能夠最大程度地提高采摘機器人運動靈敏性,一般由電動機、轉子、位置傳感器和開關器組成[4]編碼器最大的用處在于當沒有定點停車標志時,可根據其A、B的輸出方波,計算距離,從而實現標準位置停車。
2.2 采摘模塊
抓取果實的機械臂由數字舵機與支架構成,數字舵機發送一次PWM信號就能鎖定角度不變,而且可以通過上位機軟件與舵機控制板通信直接調節舵機角度,在利用舵機控制板控制舵機時,注意電源供電不足,會引起舵機亂動,或者舵機不受控。供電不足表示電流不夠,不是電壓不夠,電流是用多少取多少,而且舵機控制板是個輔助工具,只能接收單片機發送的命令,或者執行事先設置好的命令,不能對其編程,只能作為一個驅動板。在與單片機通信時,要嚴格按照所用舵機控制板的協議來通信,否則,可能損壞舵機控制板或者舵機。在給舵機控制板剛通電時,舵機可能會亂動,這是上電復位的情況。可以在電腦上先設置一個簡單的動作組,并且用上位機軟件設置為脫機工作,這樣就可以解決舵機在剛通電時亂動的問題。
2.3 尋跡模塊
不能按照既定路線行駛往往是機器人設計時的一大難題,為了解決這一難題,我們采用了2排7路的傳感器,這樣,可以多路協同工作,在誤差區間進行補償,從而使機器人回到既定路線。傳感器以二值狀態工作,可通過調節靈敏度從而達到設置預值的目的,在沒有達到閾值時傳感器輸出3.3伏電壓,為高電平,當識別到路線時,輸出0伏電壓,為低電平,這樣,就可以以高低電平的不同狀態來進行尋跡。
3 軟件設計
3.1 部分控制算法邏輯
當給機器人各部分上電后,首先STM32發送指令給動力模塊,將PWM信號發送各電機驅動。換言之,控制電機用的是PWM控制方式,該方式是通過電機電樞電壓的接通時間與斷開時間的比來控制電機轉速的[5],這個比值稱作占空比,通過調節占空比大的大小即可調節電機轉速。其次設置相應的引腳為高低電平控制正反轉,當機器人啟動后,初始化傳感器,使傳感器處于工作狀態,隨時矯正機器人的位置,當機器人到達有果蔬的地方后,主控板停止發送PWM信號或者控制正反轉引腳都為低電平使機器人停下來;然后,由串口發送特定的字符串給采摘模塊中的舵機控制板,使機械臂和機械爪工作,實現果蔬抓取。收集完成后,主控板重復上述指令,即可再次進行抓取。
當機器人走到需要轉彎的地方后,判斷是否有標志線,若有,則利用傳感器來轉彎;若沒有,則啟動三軸陀螺儀傳感器模塊,主控板發送指令給繼電器,使陀螺儀上電復位,然后主控板再發送特定角度轉彎指令,陀螺儀傳角度給主控板進行判斷轉彎何時停止。等機器人轉彎到位之后,動力系統啟動,再次執行動力指令和按步驟執行抓取指令。程序流程圖如圖5所示。
3.2 MPU6050三軸陀螺儀設置
在機器人行走的時候,轉彎如何轉一個既定的角度,這是設計中的難點,利用傳感器的狀態差只能轉特殊的角度,不能達到隨心所欲的角度轉向。基于這個問題,給機器人裝配了MPU6050卡爾曼濾波角度傳感器,其可以測量三維加速度(±16 g),三位角速度(±2 000 deg/s),三維角度(X Z 軸±180°Y 軸±90°)。而在這里,因為一般為平面作業,我們大材小用,只用它來測量Z軸角度,與單片機連接,如圖6所示。
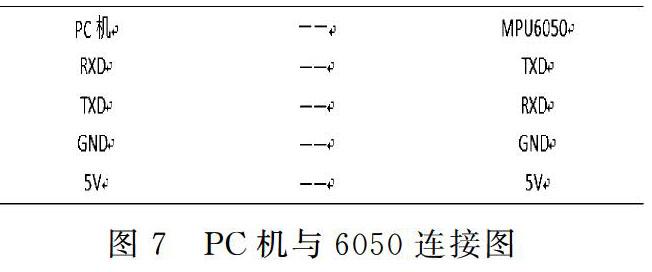
與6050的信號線和時鐘線是根據自己沒有用到的引腳設定的,不固定,可以根據方便和需要臨時更改,在與單片機連接好后,還需與PC機上位機軟件相連,連接如圖7。
6050與PC機連接好后,在上位機軟件里配置Z軸自主調零,這步操作會使6050在每次重新上電時,Z軸角度都會置零,從而實現相對角度的轉彎,不需要測量絕對偏角,而且偏角也可以利用上位機軟件來查看。至于如何到每一個位置都使Z軸角度置零,這就需要給6050重新上電,在此之前,6050要斷電,要實現這個功能,可以在6050的供電引腳中間加入5伏繼電器,利用單片機來控制繼電器的常開或者常閉端,從而實現6050的上電與斷電。在單片機內可以利用II2C總線讀取值,與自己設定的預值來比較,在加入6050的偏差值,來實現特定角度的控制,注意,要使角度準確,就特別要注意6050的安裝位置,安裝位置也能影響角度。單片機讀值程序如下:
4 機器人測試
4.1 機器人轉彎與抓取測試
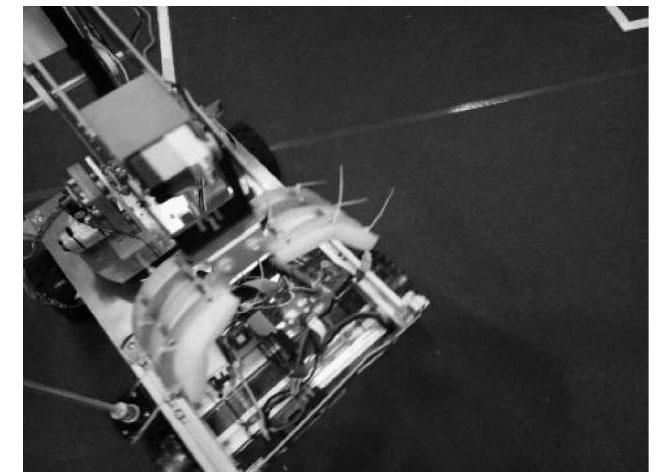
根據原理圖將機器人搭建出來以后,將機器人放置在模擬果園場地上進行了測試,觀察其尋跡、轉彎、抓取各個部分的工作情況以及統計必要的數據。當機器人開始工作時,其特定角度的轉彎,如圖8所示。
并且要求誤差上不能超+1度,機器人實際轉彎角度如圖9所示。
機器人抓取果實和蔬菜時效率高,準確率高,其實際狀態如圖10、圖11所示。
為了測試機器人的平均工作狀態和gon工作性能,根據大數定律,判斷機器人的工作穩定性及各項性能指標,對如下項目進行了測試,如表2所示。
機器人的行走距離和轉彎角度對機器人來說至關重要,為了得出最優控制數據,對距離誤差和角度誤差進行了測試,如表3、表4所示。
由表2測試數據得,機器人各項性能穩定基本能實現所期望的功能。從表3和表4數據可以看出,機器人的平均距離誤差和平均角度誤差都在某一個很小的范圍內波動,說明機器人的距離和角度誤差基本為一個可以預測的值,這就使機器人控制時可以考慮其為一個定值,更好的控制機器人的位姿。測試表明,該機器人能好的適應工作環境,通過時間測量得出,計算其一天理論工作量與人的理論工作量進行對比,并且,隨著勞動時間的加長,人會累,要休息,而機器人只需更換動力電源即可,相比之下,機器人更勝一籌。對比數據,如表5所示。
4.2 編碼器定位測試
在沒有停車標志的區域,也是最貼合實際果園的區域,則用編碼器來控制機器人走的距離。在模擬果園中,兩顆果樹之間的距離是可以測量出來且不會變動的,而且機器人采用了1:150的減速編碼電機,減速后的編碼器線數為1 650,機器人的輪子直徑為125 mm,兩顆果樹之間的距離為1000 mm,計算得要使機器人走1 m的距離,電機應該大約轉2.55轉,即編碼器計脈沖書約為4 202。在測試中,單獨拿出一電機與LCD顯示屏、stm32控制板配合進行測試,實驗程序如下:
程序實現功能為利用外部中斷記錄脈沖數,再通過lcd顯示出來。電機轉一圈,指針也轉一圈(在電機轉軸上粘結一個指針),而當指針停在某一角度時,用該角度比360度即為電機所轉圈數,再乘1 650即為編碼器理論上應該發出的脈沖數,與lcd顯示屏的上顯示的實測脈沖數比較,從而判斷編碼器控制距離的準確性。共做三組測試,如圖12—圖20所示。
通過三組測試,將理論值與實測值進行比較,判斷編碼器的誤差,以及計算在模擬果園中,從一棵樹到另一顆樹,該設置多少脈沖數,實測值與理論值的比較,如表6所示。
通過三組測試數據與理論數據的對比可以得出,編碼器實際發出的脈沖數與理論值相差在±2之內,而2個脈沖對機器人輪子的影響可以忽略不計。因此,模擬果園中可以設置編碼器的脈沖數為4202±2,從而實現編碼器控制距離,使機器人定點停車。
5 總結
(1) 研究中將地形與位置結合來選擇機器人控制方案,實現了較高精度的控制。并且采用三軸姿態傳感器,解決了傳統車型機器人位置不好控制的問題,密碼器加姿態傳感器是一種較好的機器人位置控制方式。
(2) 實現了在模擬現代化生態果園中果蔬的采摘,采用定位定量分析法將機器人的工作效率大大提高,符合機器助人這一科學理念。
(3) 基于stm32的農業采摘機器人操作簡單,可靠耐用,性能良好,打破了傳統的農業服務模式,通過數據對比,其工作能力優于人,可以進行長時間的高強度勞動,可以成為人類的好幫手。且機器人成本較低,一個普通工人月工資應該在5000RMB到8000RMB,而該機器人的成本不到2000RMB,后期優化加入其他模塊,也不會超過人力成本,相比之下,基于stm32的農業采摘機器人優點頗多,有很大的發展潛力。
(4) 在以后的研究中,我們將加入機器人視覺,采用雙攝像頭,利用機器視覺中積分求和思想、模板匹配法、將識別到的果蔬在RGB圖和灰度圖之間轉換,利用不同色彩空間下算法的不同優點來提高果蔬識別率。利用電磁光譜下根據紅外區域反射率的不同來進行果疏的檢測與識別[6]的方法;參照Unay提出的通過提取蘋果的幾何特征,使用統計分類器訓練的方式進行蘋果的識別方法[7];Yimyam提出的采用遺傳規劃技術來對果蔬進行識別的方法[8];莊路路等人提出了基于 SURF 算法和 BP 神經網絡的水果識別方法[9]來提高機器人的智能化水平;降低材料成本,以市場的要求來設計和制作機器人。滿足過大果農的需求。
參考文獻
[1] 戴增輝, 李光布. 水果采摘機器人控制系統研究——基于英語語音識別技術[J]. 農機化研究, 2019,41(2):225.
[2] 宋健, 張鐵中, 徐麗明,等. 果蔬采摘機器人研究進展與展望[J]. 農業機械學報, 2006, 37(5):164-168.
[3] 張潔, 李艷文. 果蔬采摘機器人的研究現狀、問題及對策[J]. 機械設計, 2010, 27(6):1-5.
[4] 張戰杰. 基于直流電機驅動電路的移動式采摘機器人設計[J]. 農機化研究, 2019, 41(04):248-251.
[5] 劉成濤, 王震, 吳佩志,等. 基于STM32的家用遠程CO報警系統[J]. 國外電子測量技術, 2017, 36(6):71-74.
[6] Jimenez A R, Ceres R, Pons J L. A Survey of Computer Vision Methods for Locating Fruit on Trees[J].Transactions of the ASAE,2000,43(6):191-192.
[7] Unay D, Gosselin B, Kleynen O, et al. Automatic grading of Bi-colored apples by multispectral machine vision[J]. Computers and Electronics in Agriculture, 2011, 75(1):204-212.
[8] Yimyam P, Clark A F . Agricultural produce grading by computer vision using Genetic Programming[C]// 2012 IEEE International Conference on Robotics & Biomimetics (ROBIO),2012:458-463.
[9] 莊路路. 基于改進SURF算法和神經網絡的水果識別技術研究[D].哈爾濱理工大學,2016.
(收稿日期:2019.08.10)