一種新型智能助行車設計
2020-06-29 23:57:09陸英男劉博沈慶杰
科技創新與應用 2020年20期
陸英男 劉博 沈慶杰
摘 ?要:智能助行車主要為身體虛弱或下肢功能不健全的老年人群實現獨立自主行走而設計,它能幫助此類人群解決行走距離短、平衡能力差、容易跌倒等問題,能根據不同的使用環境為使用者提供可調可變的持續的助力、阻力及安全保護,讓使用者能夠更加安全地擴大活動范圍,改善身心健康狀況,提高生活質量。產品定位為一款人機互動的智能設備,人作為操作設備的輸入信號源,同時也是助行車的控制對象,人對智能助行車的作用力一方面作為控制其運動的信號輸入,另一方面智能助行車的運動也會對人產生作用力,輔助使用者行走。
關鍵詞:智能助行車;力傳感器;交互控制
中圖分類號:TP24 ? ? ? ? 文獻標志碼:A ? ? ? ? 文章編號:2095-2945(2020)20-0031-02
Abstract: The intelligent rollator is mainly designed for the elderly who are weak or with imperfect lower limb functions to walk independently. It can help such people solve the problems of short walking distance, poor balance, easy to fall, etc., and can provide users with adjustable and variable continuous assistance, resistance and safety protection according to different use environments, so that users can more safely expand the scope of activities and improve their physical and mental health, thus improving the quality of their lives. The product is positioned as an intelligent device with man-machine interaction, and the human is not only the input signal source of the operating equipment, but also the control object of the driving aid. On the one hand, the force acting on the intelligent driving is used as the signal input to control its movement; on the other hand, the movement of the intelligent rollator will also produce a force on people to assist users to walk.
Keywords: intelligent rollator; force sensor; interactive control
1 設計背景
我國已經步入老齡化社會,預測到2030年我國老年人口將達到2.55億,2050年將達到4.4億,屆時老年人口的比例將達到人口總數的31%,即每3個人當中就有一個老年人。在困擾老年人生活的諸多問題當中,尤為突出的是老年人對獨立自主外出行走的渴望得不到滿足。部分老年人由于身體虛弱或下肢功能不健全,導致獨立行走困難,需要在一定的輔助下行走;另外,老年人在行走的時候由于反應能力下降導致行走平衡能力下降,隨時有跌倒的危險;這就需要一款小型的助行設備幫助老年人群安全地行走,增加其外出運動的頻率,提高其生活質量。
2 市場現狀
縱觀目前國內外小型智能助行類設備,大多數處于研發階段或樣機階段,以成熟產品姿態投入到市場上的品種和數量相對較少。尤其在國內市場上缺少成熟的智能助行車用于老年人日常生活的行走輔助。分析主要原因有以下幾點:(1)技術尚未成熟,安全性、可靠性難有保障:作為一款針對老年人的智能助行設備如果不能保證其安全性,一旦出現事故,損失將難以彌補。(2)產品價格過高:科研院所及高校研發的產品對成本的控制能力弱,造成成本過高不能被廣大消費者接受;由企業研發的產品處于小批量生產階段,也存在成本高的問題;國外產品價格昂貴,難以被國內普通消費者接受。(3)具有多樣功能的產品操作復雜,不便于老年人使用;相反,易于操作的產品功能單一不能滿足用戶的需求。
綜上所述,市場上需要的智能助行車應該滿足三點要求,第一要確保產品的安全性與可靠性;第二要設計出滿足用戶需求的各項功能,解決老年人的實際問題;第三要在生產方面控制成本,使智能助行車產品的價格能夠被大多數的消費者所接受。
3 設計方案
3.1 結構與參數
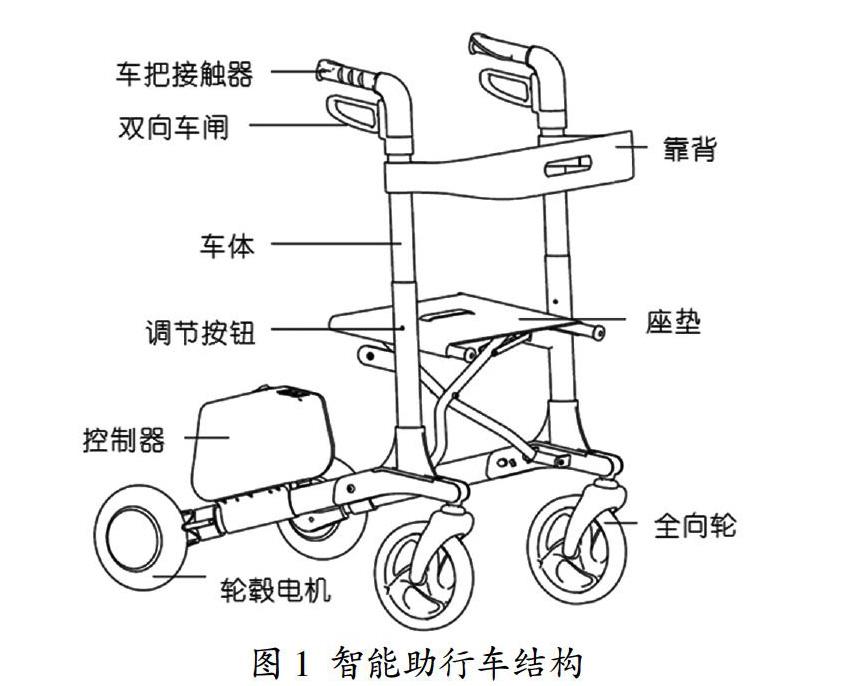
本智能助行車的結構形式如圖1所示,主要由把手接觸器、雙向鎖緊車閘、車體、靠墊、座墊、輪轂電機、控制器等部分組成。整車重量15kg,最大尺寸為長810mm、寬660mm、高935mm,車身可折疊,占地空間小,折疊后尺寸為長730mm、寬230mm、高805mm;車體高度可調節,適用于不同身高的使用者;座墊可供乘坐休息,最大承重100kg;前輪為全向輪,也可以通過一鍵鎖死功能固定全向輪的方向只能向前,這樣可以防止平衡能力差的用戶保持向前行走的趨勢;雙向鎖緊車閘具有抱死保持裝置,當向下拉緊手剎時,手剎的位置會被固定在抱死的狀態,需要手動解除,提高使用的安全性;智能助行車采用鋰電池供電,充電采用29.4V2A的充電適配器,充電時間2.5小時,連續運行時間4小時。
3.2 功能
本智能助行車是一款人機互動設備,使用者作為操作設備的輸入信號源,同時也是助行車的控制對象,使用者對智能助行車的作用力作為控制其運動的信號輸入,智能助行車的運動也會對使用者產生作用力,輔助其行走。
本智能助行車主要功能如下:(1)握把檢測:智能助行車上電后,使用者雙手握住車把,可推動智能助行車前進,速度跟隨用戶行走的速度而變化。使用者任意一只手離開車把,行走輔助機器人會立即停車。(2)速度限制:智能助行車的速度可設置為“1-5”檔,對應的速度分別為0.2m/s、0.4m/s、0.6m/s、0.8m/s及1.0m/s。當使用者推動智能助行車行走的速度大于設定速度時,智能助行車會立即剎車停止;當使用者推動智能助行車行走的速度小于或等于設定速度時,智能助行車在行進方向上提供持續的助力,助力大小為當前“助力”檔位的設定值。(3)速度、阻力、助力設定值可調節:使用者可以根據自身的實際情況,調整智能助行車的最大運行速度,以及在平地上提供的持續助力值或者阻力值的大小。智能助行車可提供的最大助力為上坡20N、平地40N,最大阻力為下坡30N。(4)上下斜坡輔助功能:智能助行車所能檢測到的坡度范圍為5°至15°,當地面坡度小于5°時,助行車判定為工作在平地模式;當地面坡度大于5°時,助行車判定為工作在斜坡模式,在上坡過程中提供持續助力,下坡過程中提供持續阻力;當地面坡度大于15°時,助行車判定為工作在坡度為15°的斜坡上。(5)防止向前跌倒功能:當使用者有向前跌倒的趨勢時,智能助行車可以識別到使用者此時的狀態,并剎車且保持停止狀態,給予使用者一個與前傾相反的阻力,防止使用者跌倒。(6)雙向剎車功能:智能助行車設置了雙向剎車功能,具有在行走過程中的上拉剎車和休息時的下拉駐車兩種模式。當向下拉緊手剎時,手剎的位置會被固定在抱死的狀態,需要手動解除,當使用者坐在小車的坐墊上時可以使用該功能防止小車滑動。(7)可作為座椅使用:在平坦的路面上,可以作為座椅使用,使用前必須將車閘下拉使后輪抱死。(8)折疊與展開:智能助行車具有車身折疊功能,能夠實現車身的展開與折疊,不使用時將其折疊存放,節省存放空間。(9)車把高度調節:將車體兩側的高度調節按鈕按壓到腔體內,下壓或者上拉車把,使按鈕在合適的孔位彈出,實現對車把高度的調節,以適合不同身高的使用者。
3.3 控制方式
(1)行走意圖識別:通過使用電容接觸傳感器及力傳感器,識別使用者的行走意圖,包括走行的方向、速度等,根據反饋信號選擇不同的行走模式。內嵌在車把處的力傳感器用來判斷使用者行走的意圖,根據力傳感器數據大小,量化使用者行走意圖的強度。根據左右兩手的力量差可以得出使用者想要行走的方向。例如使用者向左轉彎的時候必然左手力量減弱或左手有向后拉扯車把的力量,而右手會增加推動的力量。以此為依據控制智能助行車兩個輪子的轉速,運動差速調節助行車偏轉角度達到轉向的功能。(2)人機力交互控制:將使用者與智能助行車之間的相互作用力作為控制對象,控制助行車行進的速度,起到輔助老年人行走的功能。當使用者下肢功能不健全,在行走過程中智能助行車需要提供一個輔助的力阻止使用者由于重心不穩向前傾倒的趨勢。(3)跌倒檢測與防倒:通過力傳感器檢測使用者跌倒前的推力變化,以此判斷跌倒的趨勢和風險度,智能助行車在檢測到“跌倒”信號的時候采取最優的防倒策略避免使用者跌倒。當使用者被障礙物絆倒,身體急速向前傾覆的時候,通過檢測人機交互力的變化可以判斷是否有跌倒的危險,并啟動防倒功能。(4)功能顯示及控制面板:有低成本DSP系統為核心構建的機器人控制板卡。滿足機器人運動控制及通訊性能。能夠符合長期穩定工作、一鍵迅速開機等穩定性。(5)電機及電源控制:控制板通過CAN總線連接電機控制板與電源,實現運動控制。板卡可驅動額定電壓24V,額定電流10A的無刷直流電機;板卡預留多種類型接口,可通過USB接口進行上位機軟件調試,采用SPI接口的FRAM存儲參數;板卡設計有過流、過壓、欠壓和溫度保護。
3.4 設計特性
(1)維修性設計:本智能助行車采用模塊化、集成化的設計思路,設備可靠性高、穩定性強、容錯性能好。標準化設計的零部件具有良好的互換性,出現故障時可以迅速方便地更換,各組件通用性高,市場來源廣泛,能夠充分保證供應。(2)測試性設計:本智能助行車的各項指標參數均方便采樣測量,可通過各預留接口和模塊進行電流采樣、電壓監測、速度、位置檢測,可通過USB接口進行上位機軟件調試。(3)環境適應性設計:本智能助行車可以通過調整設定值功能來針對不同的路面情況,在平地和上坡時助力行走,電機提供主動助力,進行重力補償;下坡時保持恒定速度,電機維持穩定速度,防止下坡時加速,并且在使用者松開把手的情況下會自動停止前進;在斜面側行也可以保持直線行進,避免側滑。
4 結論
本智能助行車是以康復醫療產品各項標準為依據和指導進行設計的新型結構、控制用板卡及周邊傳感器的綜合智能設備。產品已經實現批量生產,經實際驗證本智能助行車可靠性高、安全性高、成本低,滿足身體虛弱或下肢功能不健全的老年人群的使用需求。
參考文獻:
[1]黃曉琳.人體運動學(第2版)[M].北京:人民衛生出版社,2013.
[2]上田淳,栗田雄一.醫療機器人建模與制造[M].晁飛,譯.北京:機械工業出版社,2017.
[3]馮建光.失智失能老年人日常照護指導手冊[M].上海:上海浦江教育出版社,2014.