基于SOPC的顯示器電路微控制器驅動設計
2020-06-28 00:54:31吳玉龍
現代信息科技 2020年24期


摘? 要:為了提高顯示器電路微控制器驅動速度,提升驅動性能,提出基于SOPC的顯示器電路微控制器驅動設計。采用可編程邏輯技術、編程梯形圖進行三相控制,設計驅動模塊。通過串口電路、顯示器電路微控制器以及CAN,設計ARM控制模塊。引入PWM數據微處理技術控制模擬電路輸出數據,設計PWM數據通信模塊,實現顯示器電路微控制器驅動整體設計。實驗結果表明,基于SOPC的顯示器電路微控制器驅動速度較快,能夠有效增強驅動性能。
關鍵詞:SOPC;顯示器;電路;微控制器;驅動
中圖分類號:TN873? ? ? 文獻標識碼:A 文章編號:2096-4706(2020)24-0050-03
Driving Design of Display Circuit Microcontroller Based on SOPC
WU Yulong
(Nanjing Paneng Technology Development Co.,Ltd.,Nanjing? 210032,China)
Abstract:In order to increase the driving speed and improve the driving performance of display circuit microcontrollers,a driving design of display circuit microcontroller based on SOPC is proposed. Using programmable logic technology,programming ladder diagram for three-phase control,and designs driving module on this basis. ARM control module is designed through serial port circuit,display circuit microcontroller and CAN. PWM data micro processing technology is introduced to control the output data of analog circuit,and PWM data communication module is designed to realize the overall design of display circuit microcontroller driving. The experimental results show that the driving speed of the display circuit microcontroller based on SOPC is very fast,which can effectively enhance the driving performance.
Keywords:SOPC;display;circuit;microcontroller;driving
0? 引? 言
顯示器電路微控制器驅動以其強大的全數字化驅動器,成為當今廣為采用的微控制器驅動。顯示器電路微控制器驅動的設計主要包括:功率板、三相正弦PWM及內核程序三部分[1]。從對顯示器電路微控制器驅動的發展趨勢分析中,可以看出顯示器電路微控制器驅動設計越來越趨于數字化、智能化、集成化以及網絡化。數字化是指通過新型的芯片、采用人工編程的方式設計全數字化的伺服系統,只需改變軟件即可對硬件進行相應的控制。智能化是指結合神經網絡控制以及自適應控制,將外界干擾因素對顯示器電路微控制器驅動造成的不利影響降至最低,提高顯示器電路微控制器驅動的控制精度。集成化是指通過設計集成電路,提高顯示器電路微控制器驅動中驅動模塊的靈活性。網絡化是指將無線網絡技術融入顯示器電路微控制器驅動設計中,提高數據傳輸的速率。但當前設計的顯示器電路微控制器驅動在實際應用過程中,存在驅動速度慢、穩定性差的問題[2]。筆者作為南京磐能電力科技股份有限公司在職員工,長期從事電子信息嵌入式驅動開發設計工作為了改善上述問題,優化設計顯示器電路微控制器驅動,提出了基于SOPC的顯示器電路微控制器驅動設計。可編程系統芯片(System On a Programmable Chip,SOPC)是一種高效的系統級芯片解決方案,屬于特殊的嵌入式系統芯片。利用可編程邏輯技術對梯形圖進行編程,通過設計驅動模塊、ARM控制模塊和PWM數據通信模塊,提高顯示器電路微控制器驅動速度,致力于設計出滿足驅動性能的新型顯示器電路微控制器驅動。
1? 基于SOPC的顯示器電路微控制器驅動設計
1.1? 基于SOPC的驅動模塊
顯示器電路微控制器的核心是驅動模塊,所以在設計電路微控制器驅動時,首先要對驅動模塊進行設計。采用可編程邏輯技術編程梯形圖進行三相控制,驅動電壓設為45 V,連續相電流最小至8 A,最大至12 A。于對任何復雜的驅動模塊來說,比例和量化因子的設置是必不可少的[3]。根據顯示電路單片機驅動運行的特點,構建隸屬函數,計算其比例因子和量化因子。假設其比例因子為z,可得式(1):
(1)
其中,b為輸入量的隸屬函數,a為輸出變量的隸屬函數,u為顯示器電路微控制器電機當前角度,c為顯示器電路微控制器電機當前轉速,d為輸出變量控制曲面。根據式(1),獲取比例因子。在計算驅動模塊中的量化因子時,設其量化因子為n,則有:
(2)
其中,p為對輸入量的修正值,i為電機給定轉速,E為相線電流,e為顯示器電路微控制器電機額定功率。通過式(2),得出基于SOPC的驅動模塊中的量化因子。在計算量化因子過程中,需要根據不同的PID參數對模糊原則進行調整。具體調整內容如表1所示。
從表1可以看出,基于PID參數的實際輸出變量范圍在[-6,6]之間,以此為標準建立基于SOPC的驅動模塊。
1.2? ARM控制模塊
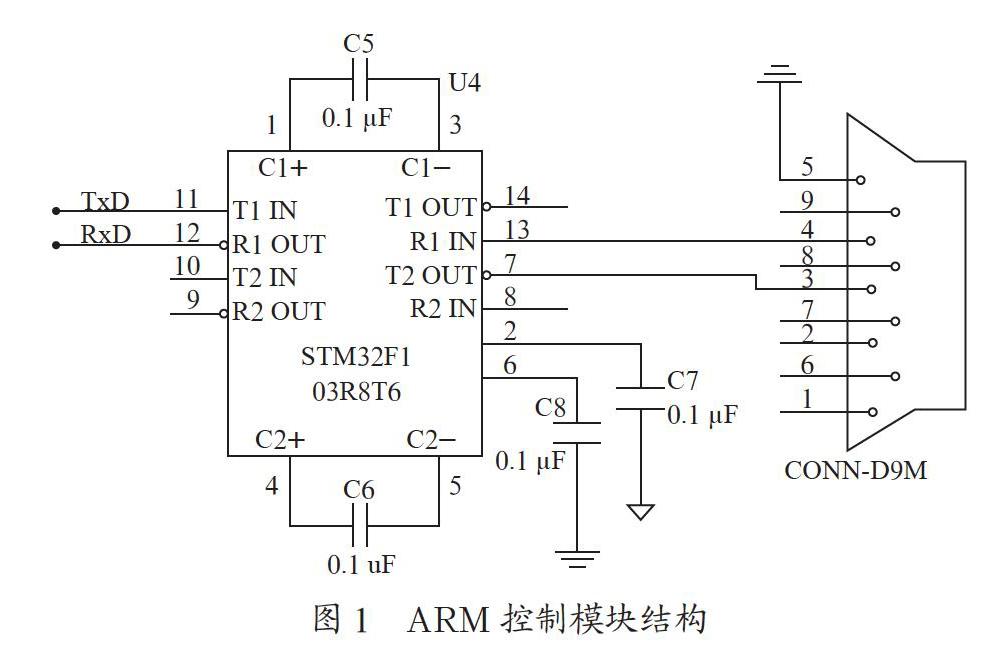
在顯示器電路微控制器驅動設計中,ARM控制模塊主要包括串口電路、顯示器電路微控制器以及CAN。ARM控制模塊結構如圖1所示。
考慮在顯示器電路微控制器驅動的設計過程中,一般選擇較小溫度系數和較高精度的電阻[4]。在設計ARM控制模塊的串口電路時,將其電阻設置為介于5.0 kΩ~180.0 kΩ之間。在3.0 kΩ~136.4 kΩ范圍內定義電阻的搜索空間,設置步長為0.3 kΩ。選用損耗小、質量優的電容,將電容值設置為18 pF以上,計算出顯示電路微控制器驅動的截止頻率,并將其用k表示,則有式(3):
(3)
其中,R和R′分別為顯示電路微控制器的兩個阻值,C為顯示電路微控制器的電容。通過式(3)可知,文中所選擇的無源低通顯示器電路微控制器的截止頻率約為160 kHz。由此可估算出電容在18 pF~1 036 pF的范圍內,步長可達18 pF。鑒于ARM控制模塊通常包含多個性能兼容性指標,因此稱為多目標[5]。分析單目標問題時,采用顯示器電路微控制器擬合ARM單目標系統的頻率響應曲線,獲取單目標優化的可靠性結論,進而得到顯示電路微控制器的自適應函數。并將其用f表示,則有式(4):
(4)
其中,s為自變量;e為采樣頻率。根據式(4)可知,在微控制器理想顯示電路的情況下,最大值為25 000。CAN主要用于串口電路與顯示器電路微控制器之間的連接。采用串口電路、顯示器電路微控制器以及CAN三部分,實現顯示器電路微控制器驅動中ARM控制模塊的設計。
1.3? PWM數據通信模塊
完成上述研究后,設計顯示器電路微控制器驅動中PWM數據通信模塊。以此,實現顯示器電路微控制器驅動設計。PWM數據通信模塊結構如圖2所示。
PWM數據通信模塊作為實現顯示器電路微控制器驅動換相功能的部分,可以使用脈沖直流舵機調試終端信息數據的輸入,引入PWM數據微處理技術,控制模擬電路輸出數據,設定其控制數據信號的周期為15 ms~25 ms。霍爾傳感器內裝有相應的舵盤通訊裝置,使其整體呈現線性變化。
舵盤直接與內部數據反饋電位幀連接,按照數據幀傳遞時間,調整電機RESET信號的電平及頻率。控制輸入轉向脈沖信號與舵盤轉向角度之間存在一定關系,可以通過定義6個PWM數據通信端接收口,依照電位針指標變化趨勢調整旋轉角。結合磁傳感器終端傳感裝置與發射管定頻安裝波長,設定通信信號接收路段,因為裝置接收端信號在傳遞過程中會受到外界影響因素干擾造成信號損失。所以采用分壓方式,安裝了多電位信號接收裝置,獲取當前位置信息,根據磁感配件規劃地磁場,錄入初次獲取的數據,對比磁場收集數據與初次的獲取數據,根據比值推斷終端接收信號數值,輸出通信數據值,實現顯示器電路微控制器驅動整體設計。
2? 實驗分析
2.1? 實驗準備
本次實驗選用TSMC CMOS 0.18 μm工藝庫,工作電壓為5.5 V,計算機選用Uicrv-18工作站,CPU主頻為600 MHz,存儲器為256 Mb。其種群大小選擇150,進化代數選擇300,設定的初始交配概率是0.95,初始變異概率是0.30。在實驗過程中,考慮直流增益問題,將顯示器電路微控制器驅動速度設置為本次對比實驗的評價指標,驅動速度越高,表明設計顯示器電路微控制器驅動性能越強。通過MATALB軟件進行10次實驗,測試驅動速度,MATALB軟件運行界面如圖3所示。
分別采用本文基于SOPC的顯示器電路微控制器驅動設計和當前顯示器電路微控制器驅動進行對比,記錄實驗結果。
2.2? 實驗結果與分析
不同方法的顯示器電路微控制器驅動速度對比結果如表2所示。
從表2中可以看出,本文方法驅動速度明顯高于當前方法驅動速度,由此可知,本文設計的基于SOPC的顯示器電路微控制器驅動速度較快,能夠有效增強顯示器電路微控制器驅動性能。
3? 結? 論
為了提高顯示器電路微控制器驅動速度,提升驅動性能,基于SOPC技術,提出了基于顯示器電路微控制器驅動設計方案。通過設計顯示器電路微控制器驅動模塊、ARM控制模塊和PWM數據通信模塊,實現顯示器電路微控制器驅動整體設計。該方法的顯示器電路微控制器驅動速度較快,能夠有效增強驅動性能。
參考文獻:
[1] 吳嘉宜.差動電感傳感器的PSoC智能化驅動設計 [J].單片機與嵌入式系統應用,2020,20(5):72-75.
[2] 朱清祥,何舟.基于新型微控制器的空氣凈化器驅動電機控制系統設計 [J].長江大學學報(自然科學版),2019,16(12):126-130.
[3] 張胤祿,宋緒超,張文棟.基于單片機的熒光燈驅動電路設計與仿真 [J].數字化用戶,2019,25(15):252.
[4] 李捷輝,冷易凌,段暢.基于mc33pt2000的共軌燃油噴射系統電磁閥驅動電路與底層軟件開發 [J].車用發動機,2019(4):41-46.
[5] 王高高,王偉偉.基于LV8726的步進電機高精度驅動系統設計 [J].信息技術,2019(2):148-152.
作者簡介:吳玉龍(1985.07—),男,漢族,江蘇徐州人,中級工程師,碩士研究生,研究方向:電子信息技術。