基于ROS的無人駕駛智能車
2020-06-24 03:00:45曾仕峰吳錦均葉智文賴怡雯葉妙欣丁凡
物聯網技術 2020年6期
曾仕峰 吳錦均 葉智文 賴怡雯 葉妙欣 丁凡

摘 要:為了進一步解決在人為駕駛中存在主觀因素的交通隱患問題,文中提出利用基于OpenCV深度學習攝像頭進行識別,使用RPLIDAR-A1激光雷達進行構建實時地圖并使小車實現自動識別交通標識、自動導航、自動避障,利用視覺識別定位技術作為ROS小車的感知方法,模擬人雙眼視覺功能,通過圖像處理信息感知客觀環境,小車再根據ROS機器人算法做出對應符合交通規格的動作,rviz機器人仿真環境,同時結合兼容Linux系統的工控機的無人駕駛智能小車。實驗表明,該方法可增大小車的精度和靈敏度,既節省駕駛員的精力,又減少了違法違規現象和交通事故的發生。
關鍵詞:雷達建模;無人駕駛;OpenCV;深度攝像學習;跟蹤識別;圖像處理
中圖分類號:TP316文獻標識碼:A文章編號:2095-1302(2020)06-00-02
0 引 言
汽車是人們生活中非常重要的一種交通工具,當今社會越來越多的人選擇使用汽車出行。汽車在方便大家的同時也帶了一些必不可少的交通問題和交通事故。為使交通路況暢通和避免一些人為可控的交通事故的發生,本文設計了一種無人駕駛智能車。該智能車通過基于OpenCV的深度攝像頭模塊[1]對紅綠燈進行跟蹤識別,通過電機驅動模塊驅動小車行駛,并在合適地點直行、左轉、右轉、停車等。利用該科技手段,可有效監控紅綠燈或突發意外,輔助或者代替司機駕駛,能規避絕大多數可能產生的意外,為人們生活工作提供安全保障。該無人駕駛汽車對行駛控制進行了優化,例如制動、加速等方面,這對于汽車提高發動機效率、降低污氣排放有積極的作用。同時運用上了結合雷達實地三維建模[2]及視頻處理技術[3],可大大地提高小車的性能,更好地實現安全無人駕駛。
1 系統總體結構
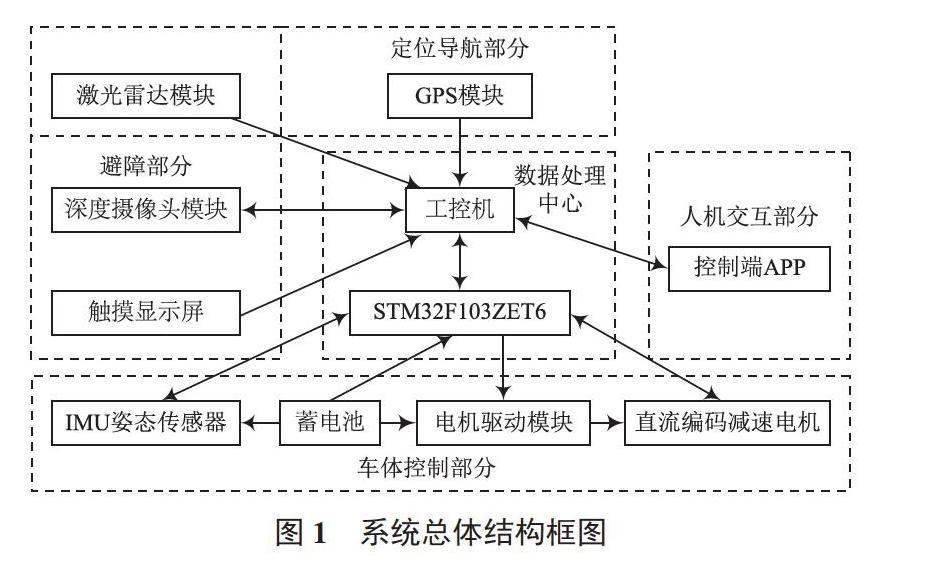
本系統總體結構如圖1所示。
該無人駕駛小車的控制系統主要由工控機和STM32F103ZET6構成。蓄電池提供整個運動控制結構所需電力,電機驅動模塊驅動直流編碼減速電機。利用深度攝像頭模塊、激光雷達模塊和超聲波模塊來實現自動導航及避障功能;結合GPS模塊、激光雷達模塊以及IMU姿態傳感器實現小車的定位導航;攝像頭模塊、雷達模塊等的實地測量數據通過觸摸顯示屏顯示出來,最后用控制端APP進行人機交互。
2 系統硬件設計
2.1 自動導航方案設計
實現自動定位巡航的傳統方案多是單純地采用GPS模塊定位技術[4],或者單純地采用雷達定位技術。本系統自動定位巡航部分不但結合了即快速又精準的GPS定位技術,還結合了實地三維建模的雷達定位技術。首先利用GPS模塊進行大概定位(U-blox6Q[5]的定位精度是2.5 m),再利用激光雷達進行實地三維建模以及定位[6](探測范圍在
20 cm~20 m之間),同時,激光雷達可以進行實地建模。這樣不僅能提高無人駕駛系統定位的精度,而且能增大自動避障的準確度。無人駕駛系統結合了GPS定位技術和雷達定位技術可以大大擴大使用范圍。GPS模塊能在室內精準定位和跟隨等,但在偏僻公路上,GPS信號會受到建筑物以及樹木的影響,從而會降低其定位準確度,但激光雷達可以利用激光在大范圍內掃描障礙物進行實地建模以及精準定位,達到自動行駛的目的。
2.2 自動避障部分方案設計
本項目由深度攝像頭模塊、激光雷達模塊、超聲波模塊對無人駕駛系統周圍環境進行實時監控,通過攝像頭視頻處理技術判斷小車是否行駛在安全路段[3],通過攝像頭視頻處理技術以及雷達三維建模技術進行判斷道路是否具有障礙物需要避開;同時,結合超聲波模塊的短距離精準測距的功能來提高小車避障的準確度和安全度。此外,本項目還采用改進后的YOLO行人檢測算法[7]。該算法可實時跟進對人及移動物體的檢測,并精準定位到小車與行人或移動物體的距離,讓小車與障礙物保持絕對安全距離,避免安全事故的發生。
3 系統軟件設計
3.1 ROS系統的優點
本文系統使用的是基于Linux的ROS系統。該系統采用分布式框架的結構,通過點對點的方式可以讓機器人分別運行不同的進程。除此之外,ROS系統還支持多種語言的編譯,比如C++和Python等熱門語言都是目前ROS系統應用最廣的開發語言。另外,ROS系統是一個對所有開發者都開放的系統,并且具有強大的生態鏈,其核心設計方法為松耦合設計,這就有利于功能的復用和軟件的拓展[8]。
3.2 OpenCV識別系統
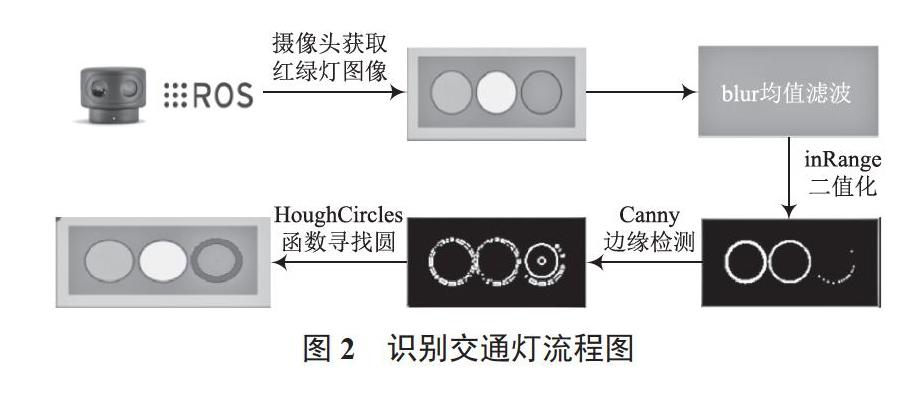
本文在ROS系統的基礎上,主要使用C++編譯語言去實現小車的自動駕駛功能。通過調用OpenCV函數庫去實現對交通標志和停車線的檢測。對于交通燈的識別,這里采用的方法是先找出所要識別的顏色,再判斷該顏色是否為圓,從而判斷出找到的是什么顏色的交通燈,其總體框架如圖2所示。
首先調用Open CV函數庫庫中的blur函數[9]對圖像進行均值濾波,其原理為由該點的一個鄰域中各點值的中值來代替,讓周圍的像素值接近真實值,從而消除孤立的噪聲點[9]。再將濾波后的圖片使用inRange()函數對圖像進行二值化的限定,找出紅綠燈的顏色;然后,在找到顏色的基礎上使用Canny算法找出識別出的圖像顏色邊緣;最后使用HoughCircles函數進行最后的找圓。
3.3 SLAM算法建模
SLAM(Simultaneous Localization and Mapping)又稱同步定位與建圖,是在未知環境下,機器人在運動過程中實時觀測地圖特征,再根據自身位置的變化進行地圖特征的匹配,從而完成定位和地圖構建的技術[10]。通過SLAM算法可以完成對空間的建模和自身的定位還有行人的檢測。
本文通過雷達采集實際環境中的數據。所謂的數據就是一系列分散的、具有準確的角度和距離信息的點—點云。再將采集到的數據對不同時刻的目標位置所移動的相對位置進行大概估算。特征匹配的算法有多種,一開始的有SIFT算法[10],其原理為采用高斯核與原圖像進行卷積,生成分辨率逐層降低的圖像金字塔,然后在相鄰塔層間相減,得到由高斯差分金字塔構造的尺度空間[10]。本文使用的是SIFT的改進版SURF算法。該算法對圖像進行積分,極大程度上的減少了圖像中計算特征點的時間,有利于圖像處理速度的提升,對于特征矢量描述子的計算,這里使用歐式距離公式對不同時刻的特征點進行計算,公式如下:
式中:d(A, B)圖像中物體A到物體B的歐式距離;Pi,Pj分別是圖像對應的第i個、第j個像素點;m,n分別為圖像對應物體像素點的總數;DA(Pi),DB(Pj)分別為A,B物體像素點所對應的特征向量。然后使用濾波器對圖像進行優化,用來減少視覺里程計所帶來的累計誤差,增大準確度,隨后通過對比初始數據和處理后的數據所得到的運動軌跡最終完成建模。最后還要加上回環檢測來提供一個來自空間上的約束以此消除累計誤差。SLAM算法框圖如圖3所示。
最終SLAM算法建模圖形如圖4所示。
4 結 語
本文設計了一種無人駕駛智能車,并對該智能車的系統硬件結構、系統軟件結構以及主要控制算法進行了設計及論述。該智能車主要運用ROS向雷達模塊與攝像頭模塊發送信號,激光雷達模塊通過SLAM算法進行建模,再結合基于OpenCV深度學習攝像頭模塊的圖像識別以及視頻處理技術來實現自動識別、自動巡航、自動避障等功能。本設計避免了司機長時間駕駛的疲勞,無人駕駛小車精準定位導航也對穩定交通秩序做了極大貢獻,同時,也能減少交通事故的發生。綜上所述,運用ROS可以將現實場景很好地模擬出來,并對各類突發狀況進行高效的處理。
參考文獻
[1]王曉鵬.基于OpenCV的圖像處理濾波算法研究[J].現代工業經濟和信息化,2018,8(6):61-62.
[2]白云裳,劉猛,馮酉鵬.基于激光雷達SLAM室內定位方法[J].中國新通信,2019,21(16):52.
[3]楊磊,王少云,劉力冉,等.一種智能視頻監控系統中的行人檢測方法[J].計算機與現代化,2019(11):69-74.
[4]陳紅齊,吳益新.北斗導航及GPS技術在航海定位中的應用[J].設備管理與維修,2019(12):225-227.
[5]王君剛,王解先,陳俊平,等.U-Blox 6接收機解碼與定位測試
[J].測繪通報,2015(11):24-27.
[6]黃曉杰,陳宇磊,邵躍堂,等.基于激光雷達的地鐵隧道形變檢測方法[J].城市軌道交通研究,2019,22(11):47.
[7]祝慶發,陳永生,郭玉臣.基于改進YOLO算法的密集人群場景下的行人檢測[J].電腦知識與技術,2019,15(22):175-176.
[8]謝萌,張世武,李旺,等.基于ROS的遠程車輛控制和目標跟隨系統設計[J].工業控制計算機,2019,32(7):29-31.
[9]陳慶偉,李民東,羅川,等.視覺SLAM中圖像特征點提取與匹配算法研究[J].現代制造工程,2019(10):135-139.
[10]王嶸,萬永菁.一種基于SLAM的多功能探索機器人設計[J].機械與電子,2019,37(9):51-53.
