多關節機器人與機器視覺通訊接口協議的設計
2020-06-22 14:21:32陳勝利林國強
機械工程與自動化 2020年3期
關鍵詞:檢測
陳勝利,肖 然,林國強
(河源職業技術學院 機電工程學院,廣東 河源 517000)
0 引言
當代工業自動化技術的快速發展,使得機器視覺設備與機器人得到越來越廣泛的應用[1]。為了提高效率與降低人工的誤操作,近年來出現了很多的機器視覺設備,若機器視覺與機器人之間能相互聯動,就可以極大地提升生產效率,同時也能降低因為操作員的某些主觀、客觀因素所造成的損失。
通過TCP/IP通信協議能夠完成機器人與機器視覺的數據交換,使得機器人與機器視覺設備相互得到所需數據,從而相互配合高效地滿足各種工業生產工藝的需求,整體提高工作效率,降低生產成本。
1 硬件結構設計
1.1 機器視覺模塊
機器視覺模塊是一種電腦與光學設備結合的裝置[2],通過視覺傳感器將現實中所識別的工件轉換為二維圖像,并通過計算機分析得到圖像的各種特征,近一步完成對圖像的處理,從而識別圖像信息[3]。其主要應用于工業生產、醫學制藥、環境檢測等,代替人眼進行檢測分析,通過軟件的處理可以識別工件的大小、形狀、缺陷等。同時,它能完成7×24 h的不間斷工作,其速度、精度均高于人工,誤判率、漏判率低于人工,能在危險的環境中工作。
本文采用海康與大華的工業相機所組成的機器視覺檢測群組,主要完成對所需檢測工件的形狀檢測、缺陷檢測、產品定位和工件分類等。研究視覺算法平臺是基于深圳創科自動化控制技術有限公司所開發的系統集成平臺CkVisionBuilder,將其作為視覺軟件運行基礎平臺[4]。
1.2 機器人模塊
本文的研究對象是一款雅馬哈四軸水平多關節工業機器人,該機器人帶有X軸和Y軸2個水平關節操控裝置,同時前端還可進行上下運動(Z軸)和旋轉(R軸),機器人前端擁有通用接口,可安裝一些夾具,例如吸盤、電磁鐵等,通過此類夾具,可以使得機器人擁有抓取工件的能力。
通過伺服電機驅動,使得機器人能快速準確地定位及抓取工件。機器人運行速度快,可高效地完成所分配的工序。設計所采用的機器人為YAMAHA RCX340[5],它采用4個伺服電機,具有精準性高、轉速快、抗過載能力強、運轉平穩、響應時間短的特點[6]。為驗證通訊協議程序的成功運行及運行穩定性,開發了一種基于機器視覺檢測和機器人分揀等功能于一體的四位一體機器視覺分揀實驗臺。實驗臺裝置和電氣控制原理分別如圖1和圖2所示。
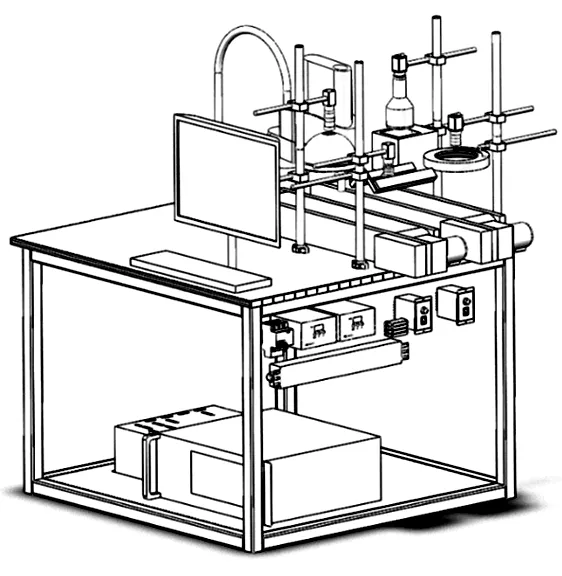
圖1 四位一體機器視覺分揀實驗臺
2 實驗臺功能
本實驗臺擁有4套機器視覺系統,可獨立進行實驗,主要功能如下:①缺陷檢測:通過檢測對象與模板進行數據對比,檢測其特征符合度;②尺寸測量:通過機器視覺對工件的尺寸進行測量,通過所得到的像素數量,再進行標定轉換得到工件實際尺寸;③坐標定位:通過軟件算法將視覺系統的像素坐標轉化為機器人的實際坐標,為機器人提供工件所在位置,從而進行工件抓取;④字符驗證:通過學習模板進行字符驗證,檢查工件字符上的漏印、變形等問題。
3 通訊協議構建
本系統通過TCP/IP通信協議進行數據交換,使得機器人接收到機器視覺發送的工件抓取點信息來完成機器人的抓取動作。通過機器視覺軟件處理得到工件的形狀、缺陷、字符等特征,通過第三方軟件平臺發送數據使得機器人完成工件的分揀。
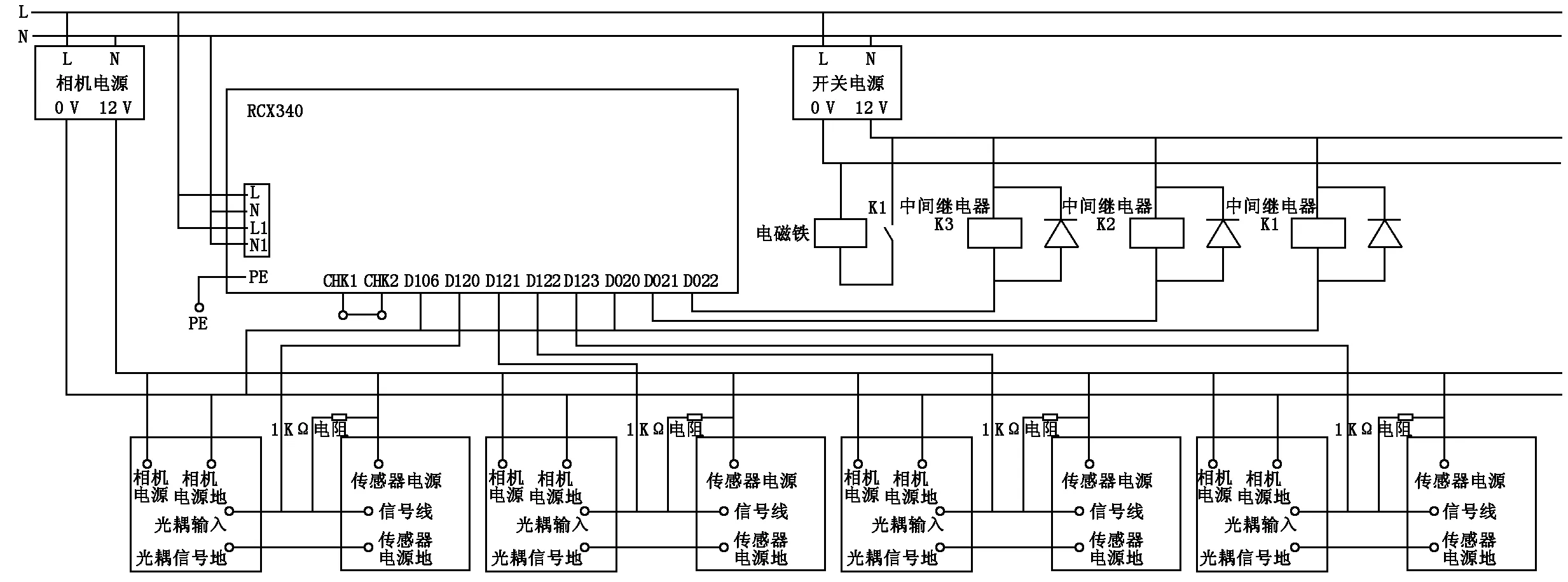
圖2 實驗臺電氣控制原理圖
TCP/IP通信協議讀取機器視覺所得坐標程序如下:
HIGHT1!=0 '復位高度
HIGHT2!=5 '抓取等待高度
HIGHT3!=47 '抓取高度
HIGHT4!=50 '放料高度
X!=0.0
Y!=0.0
STATE%=0
MOTORON
……
OFFLINE ETH
DELAY 200
ONLINE ETH
ASPEED 10
GOTO *SUB00
*SUB00:
STA$=""
SEND ETH TO STA$
SELECT CASE STA$
CASE "100"
GOTO *SUB11
CASE "1"
STATE%=1
GOTO *SUB01v CASE "2"
STATE%=2
GOTO *SUB01
END SELECT
GOTO *SUB00
*SUB11:
DRIVE(3,HIGHT1!) '上升到復位高度
WAIT ARM
MOVE P,P41 '移動到等待位
WAIT ARM
GOTO *SUB00
*SUB01:
XY$=""
X$=""
Y$=""
SEND ETH TO XY$ '從網絡讀取坐標數據放到XY$
X$=MID$(XY$,1,8) '在XY$上提取第1~8位字符放到X$
Y$=MID$(XY$,9,8)
X!=VAL(X$) '將字符串轉換為數值
Y!=VAL(Y$)
LOC1(P41)=X!'
LOC2(P41)=Y!'
DRIVE(3,HIGHT1!) '上升到復位高度
WAIT ARM
MOVE P,P41 '移動到等待位
WAIT ARM
DRIVE(3,HIGHT1!) '下降到取料高度
WAIT ARM
DO(22)=1 '開啟取料
DELAY(100)
DRIVE(3,HIGHT1!) '上升到復位高度
WAIT ARM
IF STATE%=1 THEN
MOVE P,P43 '移動到拋料位1
ENDIF
IF STATE%=2 THEN
MOVE P,P44 '移動到拋料位2
ENDIF
WAIT ARM
DRIVE(3,HIGHT1!) '下降到拋料高度
WAIT ARM
DO(22)=0 '開啟拋料
DRIVE(3,HIGHT4!) '下降到拋料高度
WAIT ARM
MOVE P,P41 '移動到等待位
WAIT ARM
GOTO *SUB00
4 總結與展望
通過運行及在線監測上述通訊協議,有效地解決了以深圳市創科CkVisionBuilder視覺軟件為平臺的第三方視覺系統與雅馬哈多關節機器人之間的TCP/IP通信數據交互問題。利用機器視覺高精度的特點,實現了對工件拾取坐標的精確定位,大幅度提高了機器人定位與追蹤的精度,克服了因生產環境的變化所帶來的不確定性,成功地解決了實際生產中因現場環境所造成的機器人的誤差定位問題。該協議成功地完成了機器人與機器視覺的數據交換,完善了工業生產的全自動化,提高了工作效率。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
