基于區塊鏈的智能網聯車隊協同軌跡預測系統
2020-06-22 06:42:12王仁生吳天昊張琳朱孔林
網絡與信息安全學報 2020年3期
王仁生,吳天昊,張琳,朱孔林
基于區塊鏈的智能網聯車隊協同軌跡預測系統
王仁生,吳天昊,張琳,朱孔林
(北京郵電大學信息與通信工程學院,北京 100876)
自動駕駛汽車技術近年來得到了廣泛研究與快速發展,但在復雜的交通場景下,自動駕駛汽車面對突然出現的行駛車輛并不能及時避讓。針對此問題,基于區塊鏈技術提出智能網聯車隊的協同軌跡預測系統,智能網聯車隊中的各個節點與路邊基礎設施通過長短時記憶網絡(LSTM)模型對周邊車輛的運動軌跡進行預判,并將得到的結果進行分享,利用區塊鏈技術,智能網聯車隊與路邊基礎設施可以對其接收到的信息進行評分,并將匯總后的評分以區塊的形式加入存儲信譽評分的區塊鏈中。通過該評分,智能網聯車隊中的車輛可以根據車隊中其他節點的信譽值來判斷其是否可信,低信譽值節點傳來的信息將不予理睬,從而實現了協同駕駛。實驗分析表明,所提LSTM模型能夠較為準確地預測周邊車輛5 s內的行駛軌跡,而所提的系統在提升智能網聯車隊的行駛安全上起到了明顯的效果。
智能網聯車隊;軌跡預測;長短時記憶網絡;信任管理機制;區塊鏈
1 引言
自動駕駛汽車技術在過去10年取得了長足進步,部分自動駕駛汽車已經進入測試階段。目前,自動駕駛汽車的避撞系統主要依賴于攝像頭配合毫米波雷達,從而對汽車行駛路徑上的障礙物進行識別和避撞。然而,由于真實的交通環境往往比較復雜,自動駕駛汽車在行駛過程中時常會與其他行駛車輛產生交互,因為遮擋和盲區等,這些車輛的行駛軌跡有時并不能被提前觀察到,交通事故往往是在這種復雜的交通環境中發生的。因此,如何規避行駛的車輛是自動駕駛汽車必須解決的問題。
為了能夠安全有效地駕馭復雜的交通環境,自動駕駛汽車需要有預判周圍車輛未來行駛軌跡的能力。然而,在真實的交通場景中,不同的駕駛員有著不同的駕駛風格,且車輛軌跡在較長時間范圍內往往是高度非線性的,這使自動駕駛汽車識別行駛意圖具有很大的挑戰性。
車輛軌跡預測的方法有很多種,如卡爾曼濾波、高斯混合模型、動態貝葉斯網絡等,最近,一些學者將長短時記憶網絡(LSTM,long short term memory network)應用到了車輛的軌跡預測中,并取得了較好的效果。LSTM是一種特殊的循環體結構,它靠一些“門”的結構讓信息有選擇性地影響循環神經網絡中每個時刻的狀態,適合于處理和預測時間序列中間隔和延遲相對較長的重要事件。目前,LSTM已經在科技領域有了多種應用,包括翻譯語言、控制機器人、圖像分析、語音識別、圖像識別、手寫識別、合成音樂等任務,將LTSM應用于車輛軌跡預測,可以有效地根據車輛之前的行駛軌跡預判其行駛意圖。
對于單車而言,其意圖識別系統可以提前感知周圍可能要發生的車輛路徑沖突問題。然而,受限于遮擋和盲區,其能夠進行意圖識別的視野區域并不夠寬廣,這也為自動駕駛汽車的安全問題埋下了隱患。借助車載網絡,自動駕駛汽車可以獲得附近車輛的視野,也可以從路邊的基礎設施中得到路況信息,這在極大程度上解決了以上問題。但由于網絡的高移動性和可變性,鄰近的車輛往往是陌生人,并不能完全信任,尤其當網絡中存在惡意車輛時,自動駕駛汽車可能收到惡意的欺騙信息,路邊的基礎設施也有受到攻擊的可能,這使問題變得更加嚴重。研究出一套智能網聯車隊的安全交互機制將大大改善車聯網中的安全隱患,這也是本文的重點。
隨著未來越來越多的網聯汽車上路,網聯汽車節點數量呈現出較快的增長趨勢,這將給中心化的安全系統帶來許多問題。首先,中心化的安全系統需要在車的維護上付出高昂的成本;其次,海量的接入將會給網絡帶來較大的擴容壓力,使中心化平臺存在性能瓶頸;此外,一旦中心節點被攻破,整個中心化安全系統將遭到無法估量的打擊。
近年來,由于區塊鏈具有去中心化、公開透明等特點,受到了人們廣泛的關注。區塊鏈技術又被稱為分布式賬本技術,是一種去中心化、去信任化、集體維護分布式賬本的技術方案,其利用塊鏈式數據結構來驗證與存儲數據,其本質是由多個節點集體參與,通過多方存儲、多方計算的方式來實現數據不可篡改、計算結果可信的分布式數據庫系統。借助區塊鏈,本文可以在智能網聯車隊中建立一個分布式的信任管理機制,從而解決參與各方的互信問題。
本文提出了一種智能網聯車隊中安全協同的意圖識別系統,其模型如圖1所示。利用車對外界的信息交換(V2X,vehicle to everything)技術在距離較近的車輛間形成智能網聯車隊,車隊中的各個節點與路邊基礎設施通過長短時記憶網絡模型對周邊車輛的運動軌跡進行預判,并將得到的結果進行分享。利用區塊鏈,智能網聯車隊與路邊基礎設施可以對其接收到的信息進行評分,并將匯總后的評分以區塊的形式加入存儲信譽評分的區塊鏈中。通過這種去中心化的方式,有效解決了參與各方的互信問題,實現了智能網聯車隊的協同駕駛。實驗表明,本文的智能網聯車隊中安全協同的意圖識別系統可以大大降低自動駕駛汽車在行駛過程中的安全隱患。
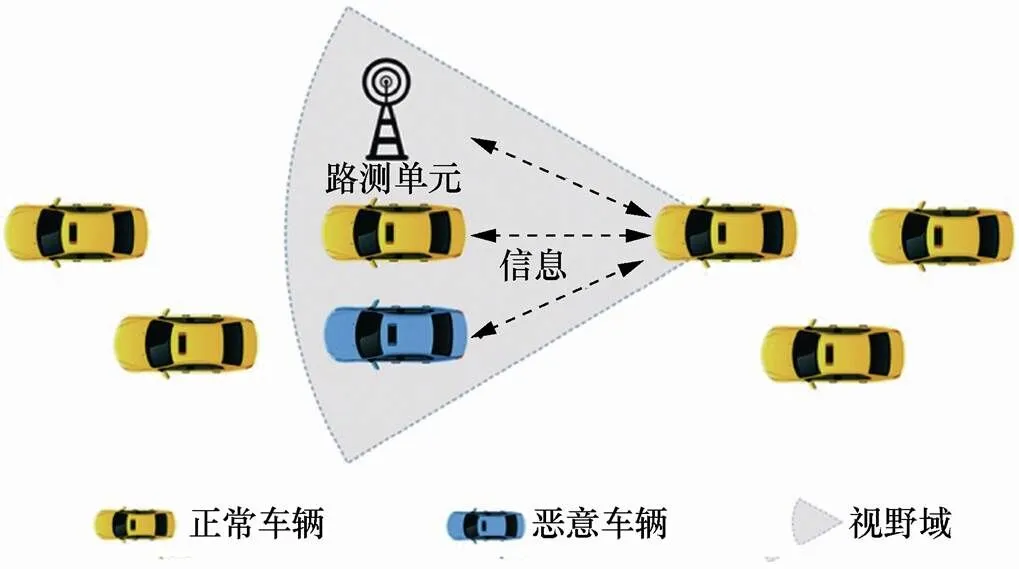
圖1 智能網聯車隊協同意圖識別模型
Figure 1 Model of the collaborative intent identification by intelligent and automated connected convoy
2 相關工作
2.1 車輛軌跡預測
為了達到車輛軌跡預測的目的,學者提出了很多方法。傳統的方法有卡爾曼濾波以及擴展卡爾曼濾波[1],然而這種方式的模型過于簡單,當車輛在較為復雜的環境下運動時,它們對于車輛較長一段時間內的軌跡預測并不夠準確。為了改進這種缺陷,一些更為復雜的模型被提出,如高斯混合模型、動態貝葉斯網絡(DBN)等[2]。使用高斯混合模型學習動態車輛的駕駛行為模式并用于駕駛行為意圖檢測,最后將動態車輛駕駛行為意圖與運動模型結合進行軌跡預測。而動態貝葉斯網絡[3]則使用圖形模型來描述各種影響車輛行駛軌跡的潛在因素,并以此為基礎為軌跡預測提供了較為靈活的模型。這兩種方法雖然有著較高的復雜度,但它們的模型忽略了周邊環境對于車輛運動軌跡的影響,在復雜的交通環境下,僅僅考慮車輛自身的運動狀態是不夠的。
由于運動任務可以被視為序列分類或序列生成任務,因此近年來,研究人員提出了許多基于遞歸神經網絡(RNN)的方法,用于機動分類和軌跡預測。Lee在文獻[4]中利用遞歸神經網絡提出了可以預測出車輛行駛意圖的方法,其模型在預測時不僅參考車輛自身的行駛軌跡,還考慮車輛周邊物體對其運動的影響,使其可以較為準確地預測出車輛在較短時間內的行駛意圖。Kim[5]則基于長短時記憶網絡提出了可以預測出在接下來0.5 s、1 s以及2 s內車輛位置的模型。然而,僅預測出車輛在短時間內的行駛意圖并不能規避車輛之間碰撞的危險,本文基于LSTM模型提出了可以預測出行駛車輛5 s內行駛意圖的模型。
2.2 車聯網中的信任管理機制
中心化的網聯車隊信任管理機制在業內已經被廣泛提出,文獻[6]提出了中心服務器的概念,利用中心服務器,系統可以收集并處理數據,從而得到所有車輛的信任值,而這些信任值也被存儲在中心服務器中。然而,這一類系統都是建立在中心服務器足夠可靠的基礎上,如果服務器受到攻擊,整個信任管理機制都將癱瘓。為了解決此類問題,一些去中心化的智能網聯車隊信任管理機制被提出。文獻[7]中每個節點首先分析信息的關鍵詞,并將信息據此進行分類,然后根據信息內容的相似度和內容之間的沖突對信息進行評分。這種方法在很大程度上擺脫了對中心服務器的依賴,然而,每個車輛節點都需要自己計算并存儲信任值,由于單個節點的計算能力以及觀察條件有限,其打分的精確度可能受到較大的限制。
針對此種情況,一些研究者提出了將區塊鏈應用于智能網聯車隊的想法[8-9],文獻[8]基于區塊鏈技術為車載網絡提出了一種新的分散式信任管理方案。借助該系統,車輛可以從自己的鄰近車輛獲得路況信息,并能夠對所接受到的信息進行評級,該評級會在路邊的基礎設施匯總并生成一個最終的得分。這種方法既避免了中心化帶來的限制,也解決了單個節點計算能力和觀察條件有限的問題。然而,對于每一車輛的信任值更新,路邊基礎設施間都需要進行“礦工”選舉,在車輛數量較大的情況下,對于路邊基礎設施的運算能力是不小的挑戰。
3 系統結構
3.1 軌跡預測
3.1.1 問題定義
本文將軌跡預測問題定義為根據車輛之前的行駛軌跡及其周圍的環境來預測車輛接下來每個時刻行駛位置的概率分布。模型的輸入為車輛的歷史軌跡。

其中,(t)為被預測車輛在時刻的坐標,而模型的輸出則為一段概率分布。
其中,(t)為被預測車輛在時刻的坐標。
本文的模型估計條件分布(|),為了讓模型產生多重模態分布,本文在動機m上進行擴展。



3.1.2 模型架構
本文的LSTM模型包括LSTM編碼器、卷積交互池化層、LSTM解碼器。
首先,本文使用LSTM編碼器來學習車輛運動狀態,對于每個瞬間,最近幀的歷史軌跡片段傳遞給LSTM編碼器以預測車輛及其周圍車輛的運動軌跡。每個車輛的LSTM狀態會逐幀更新,該狀態可以用來預測每輛車的運動狀態,而用于每輛車的LSTM相互分享彼此的權重,這使所有車輛的LSTM狀態之間存在直接相關性。
當LSTM編碼器捕獲車輛運動狀態時,它無法捕捉場景中所有車輛運動的相互依賴性。文獻[10]中提出的交互池化(social pooling)通過將預測目標周圍的所有物體的LSTM狀態匯集到交互張量中來解決這個問題。這是通過在預測目標周圍定義空間網格并基于場景中代理的空間配置用LSTM狀態填充網格來完成的,除了預測目標的LSTM狀態之外,還使用交互張量作為模型的輸入,已經證明此方法可以提高未來軌跡預測的準確性[10]。
然而,所有之前的交互池化文獻[10-11]實例都將全連接層應用于交互張量,但這種做法破壞了交互張量的空間結構。由于全連接層的存在,在空間中彼此相鄰單元之間的相互作用等同于完全連接層中彼此遠離的單元,這可能導致對測試集的泛化問題,特別是物體可以處于各種不同的空間配置中。例如,假設訓練集在交互張量的空間位置(,)沒有LSTM狀態的單個實例,當在測試集中遇到這樣的實例時,模型將無法泛化。特別地,即使在空間網格位置(+1,)和(,+ 1)處存在LSTM狀態的訓練實例,這仍將成立。
為了解決這種問題,本文在交互張量上使用卷積層和池化層,簡稱卷積交互池化,其模型如圖2所示。卷積層的等效性有助于學習交互張量的空間網格內的局部有用特征,并且最大池化層可以添加局部平移不變性,這兩者都有助于解決上述問題。
本文通過定義基于車道的網格來建立交互張量。首先,在被預測的車輛周圍定義13×3空間網格,其中每列對應于單個車道,每行保持4.7 m的距離,其大約等于一個車輛長度,而交互張量是通過將該網格與周圍的汽車位置一起填充而形成的。然后,本文將兩個卷積層和一個池化層應用于交互張量,如圖2所示,以獲得上下文編碼。此外,為了獲得車輛動力學編碼,預測車輛的LSTM狀態會交給全連接層處理。這兩種編碼連接在一起形成完整的軌跡編碼,然后傳遞給解碼器。
為了提升訓練模型時的速度,加快收斂過程,本文在每一層卷積層后加入了批標準化(batch normalization),即對網絡每一層的輸出都做了歸一化處理。有了Batch Normalization,本文不需要考慮為每一層加入隨機失活(dropout),因為Batch Normalization本身就是一種防止過擬合的正則化表達式。通過這種方法,對模型參數的初始化要求有所降低,學習率相比之前有所增大,這大大簡化了調參的過程。
本文使用基于LSTM的解碼器為接下來幀的運動軌跡生成預測分布。本文通過之前描述的每一個動機類分布以及每個動機類的概率來解決駕駛員行為的固有多模態。解碼器具有兩個softmax層,其輸出橫向和縱向操縱概率,而把這些概率相乘就可以得到(m|)的值。此外,LSTM可以用于生成超過幀的雙變量高斯分布參數,以給出車輛運動的預測分布。
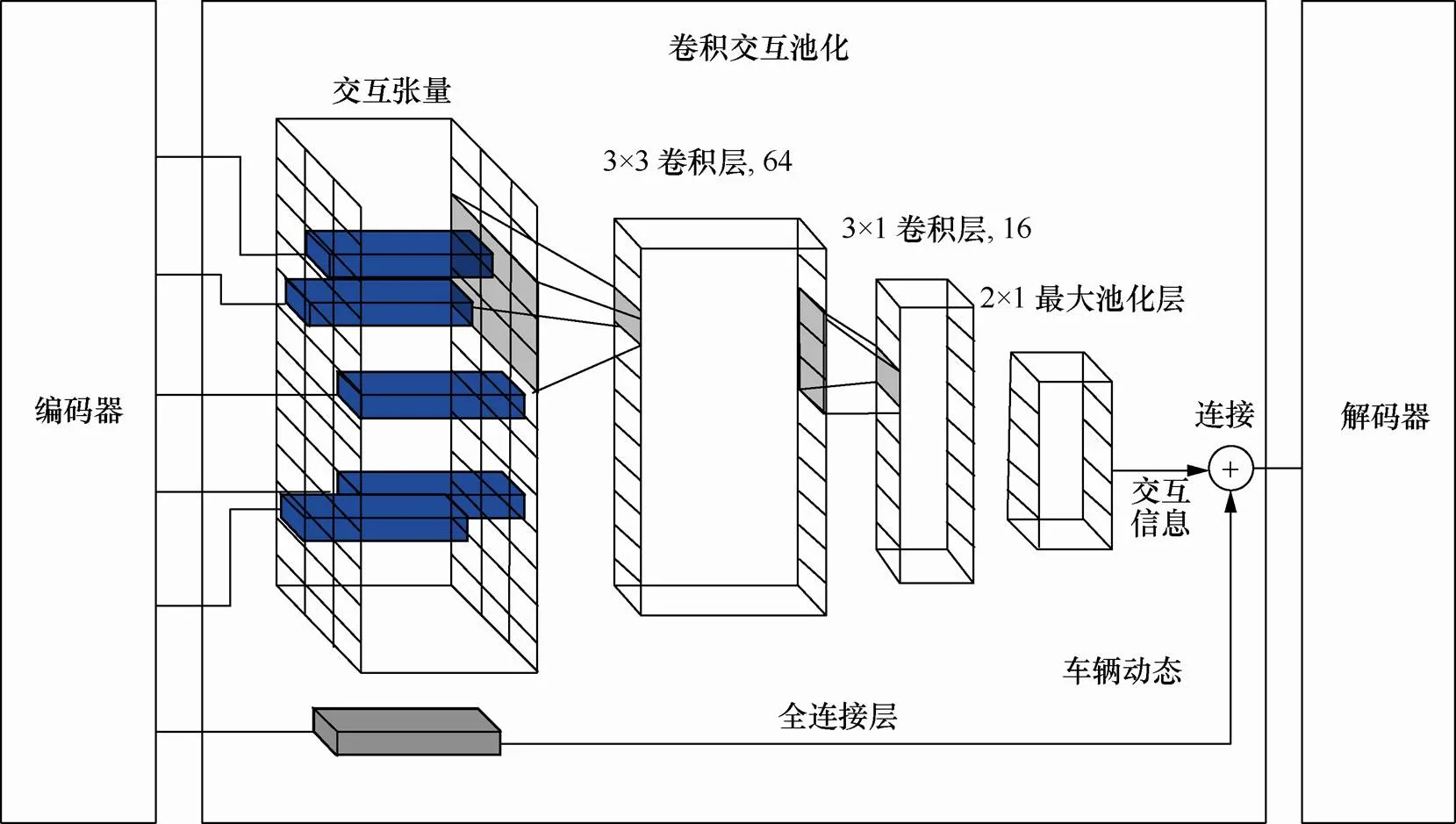
圖2 卷積交互池化模型
Figure 2 Convolutional social pooling model
3.1.3 訓練及參數細節
本文采用端到端的方式訓練模型,首先,將損失值定義為

其中,每一個點的概率分布由式(3)給出。由于每個訓練例只提供一個行駛動機的實例,本文將所有訓練例中的總損失值定義為

其中,true表示每一個訓練實例對應的結果,包括向左變道、直行、向右變道。
本文采用Adam[12]的方法來訓練所提模型,起始的學習率為0.001,訓練到20 000步后,學習率會降低到0.000 1。本文的LSTM編碼器是64維的,而LSTM解碼器為128維。而接受車輛動態編碼的全連接層有32個輸入。本文使用leaky-ReLU作為每一層的激活函數,將其激活函數參數α值設置為0.01。
3.2 基于區塊鏈的信任管理機制
借助車載網絡,自動駕駛汽車可以獲得附近車輛的視野,也可以從路邊的基礎設施中得到路況信息。然而,周圍的網絡并不一定是安全的,當網絡中存在惡意車輛時,自動駕駛汽車可能收到惡意的欺騙信息,路邊的基礎設施也有受到攻擊的可能。針對該問題,本文提出了基于區塊鏈的信任管理機制,利用區塊鏈去中心化和不可篡改的特性,能夠在一定程度上抵御上述惡意攻擊。
3.2.1 相關技術介紹
分布式賬本技術(DLT,distributed ledger technology)作為去中心化自治交易的底層技術, 使對某一節點或機構的信任轉化為對計算機協議的信任,這加快了去信任化(trust-free)對等網絡的發展[3]。區塊鏈是分布式賬本技術的一個子集,其工作機制符合分布式賬本技術的共性,而分布式賬本的數據結構會形成區塊鏈的架構基礎。因此,區塊鏈是一種單鏈數據結構。在區塊鏈上,除去創世區塊(genesis block),其他每一區塊都包含塊頭和塊身。區塊頭含有對前一區塊的哈希值(hash function, 又稱散哈希數,是一種從任何數據中創建“指紋”的方法),將其作為身份證明(identification),從而實現對前一區塊的鏈接。區塊中的交易記錄以默克爾樹(Merkle tree)的結構進行排列[5],而前后區塊則按照時間順序進行排列,否則前一區塊的哈希值是未知的,這一技術設置在很大程度上解決了重復支付的問題[6],并能通過對連續區塊的ID追蹤實現對區塊鏈上的交易按時間回溯的功能。
3.2.2 系統架構
本文去中心化的智能網聯車隊信任管理模型主要包括路邊基礎設施(RSU)以及智能網聯汽車兩部分。
(1)路邊基礎設施
在本文的信任管理機制中,路邊基礎設施不會成為系統的中心服務器,它會以一個普通參與者的身份將自己捕獲到的交通信息分享給智能網聯車隊中的車輛。通過這種去中心化的方式,系統不會過度依賴于路邊基礎設施,不僅減小了通信時延,也保證了數據的安全性和可靠性,因為即使路邊基礎設施受到了惡意攻擊,也不會對整個系統的運營造成太大影響。
(2)智能網聯汽車
每一輛智能網聯汽車都配備有車載傳感器、計算機和通信設備,用于進行數據的收集、處理和共享。
借助車載設備,車輛可以自動檢測與交通相關的事件,并使用車輛間通信標準向其他人發送警告信息,如LTE-V2V、DSRC等。然而,并非所有消息都有用。例如,如果車輛已經通過了特定事件的位置,則有關此事件的報告將不再具有價值。因此,每個車輛需要保持參考集,其參考集與目標車輛的交通安全性高度相關。在本文系統中,每個車輛的參考集由在一定距離內前行的相鄰車輛組成。使用從參考集發送的消息,車輛可以及時了解交通狀況并響應可能的事件。
3.2.3 攻擊模型
在本文的模型中,路邊基礎設施與智能網聯汽車都被視為容易受到攻擊的對象,而這兩者中的任一個受到惡意攻擊者操控都將對本文智能網聯車隊的行駛安全造成巨大的影響。因此,本文的攻擊模型主要包括惡意車輛以及受到攻擊的路邊基礎設施。
(1)惡意車輛
智能網聯車隊中可能存在許多惡意車輛,它們通常有特定的動機,會在特定的時間對周圍的車輛和路邊基礎設施發動信息安全攻擊,而這種行為可能會嚴重危害交通的安全和效率。本文主要考慮消息欺騙攻擊以及選票攻擊。
在消息欺騙攻擊中,攻擊者可能故意播放虛假消息,從而達到危害交通安全或降低交通效率的目的。例如,惡意車輛檢測到前方一輛汽車要進行向左變道的操作,但它向周圍車輛廣播向右變道的信息,從而對后面車輛的行駛進行干擾。
在投票攻擊中,惡意車輛對上傳了可靠消息的車輛進行低分評價,使本應該受其他車輛信任的信息分享者沒有得到應有的評分,從而破壞了智能網聯車隊的信息分享。
(2)受到攻擊的路邊基礎設施
路邊基礎設施沿著道路分布,有時也會受到一些攻擊者的攻擊,而一旦路邊基礎設施被入侵,攻擊者就能夠更改其數據,使其發送惡意欺騙信息給附近的車輛,因此,路邊基礎設施也是不能完全信任的。由于網絡運營商的定期安全檢查,受到攻擊的路邊基礎設施不可能長時間地被控制,因此本文假定攻擊者只能在較短時間內破壞路邊基礎設施。
3.2.4 設計目標
本文重點評估智能網聯車隊中信息的可靠性,并致力于解決以上幾種攻擊。本文的信任管理機制的主要目標如下。
(1)去中心化
隨著智能網聯汽車的快速增長,中心化的信任管理機制越來越不切實際,此外,中心化管理系統對中心服務器的過度依賴也使信息的安全性和可靠性受到了威脅。因此,信任管理機制需要充分利用分布式節點,即路邊基礎設施和智能網聯汽車。通過去中心化的管理方式,確保任一節點在受到攻擊時都不會對本文的信任管理機制造成致命的危害。
(2)可用性
在本文的方法中,所有的信任信息存儲在每一輛智能網聯汽車中,當需要查詢某一輛車的信譽信息時,智能網聯汽車只需查詢自身的存儲信息即可,因此不存在信譽信息被篡改的可能性,但存儲在每一輛智能網聯汽車中的信任值需要保證可靠有效。
(3)及時性
信任值表示基于其歷史行為的特定車輛的總體評價。由于該車輛發送的消息的可信度可能隨時間而變化,因此存儲在智能網聯汽車中的信任值需要及時更新。
3.2.5 主要步驟
本文的信任管理機制主要由以下幾個步驟實施:信息分享、處理及評分、“礦工”選舉、生成新的區塊,如圖3所示。
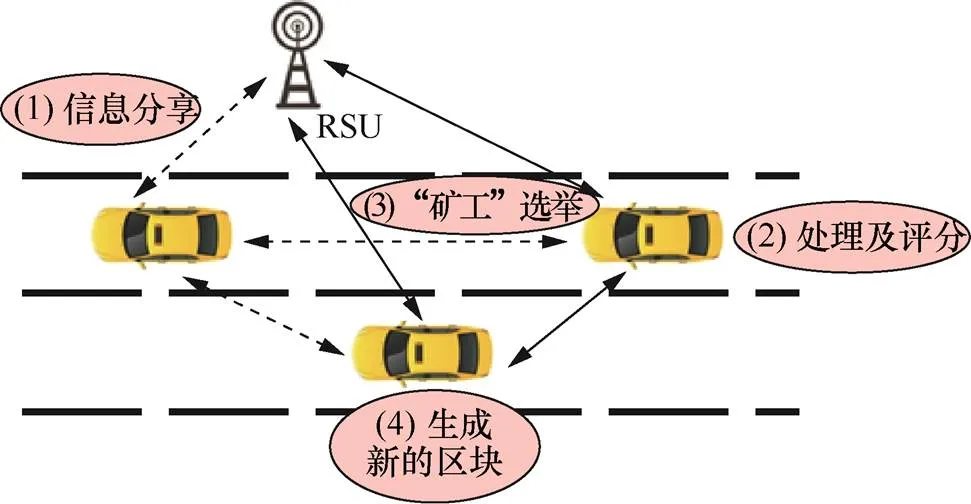
圖3 基于區塊鏈的信任管理機制系統設計
Figure 3 System design of trust management mechanism based on blockchain
(1)信息分享
在本文的系統中,距離較近的智能網聯汽車利用V2X技術組成智能網聯車隊,該車隊與路邊基礎設施形成區塊鏈網絡,該網絡中每個節點的初始信譽度為0。區塊鏈網絡中的各個節點通過攝像頭采集路面交通狀況的圖像,并對圖像中的車輛進行物體檢測。檢測到的車輛將被進行持續的圖像跟蹤,并由其過往的行駛軌跡預測出該車輛的下一步行駛意圖。本文采用YOLO[13]的方法對道路上的車輛進行物體檢測,采用deepSort[14]的方法對檢測到的車輛進行目標跟蹤。當智能網聯汽車或者路邊基礎設施預測到交通事件時,會將自己拍攝到的圖像以及自己的預測結果在區塊鏈網絡中廣播。本文中的交通事件包括左右變道、左轉、右轉、變道、加速、制動。
(2)處理及評分
智能網聯汽車接收到事件信息后,結合信息發送者的位置以及信譽值對事件進行處理。智能網聯汽車首先判斷該發送者是否在自己的參考集內,如果不在,則針對此次時間信息不予理睬。反之,智能網聯汽車會參考信息發送者的信譽值,當發送者的信譽值大于或等于0時,智能網聯汽車根據其提供的事件信息,提前做出減速或變道等避讓行為;當發送者的信譽值小于0時,智能網聯汽車將不采取避讓措施。不論信息發送者的信譽值是多少,只要其在智能網聯汽車的參考集內,智能網聯汽車都將對時間信息中車輛與自身攝像頭捕獲車輛進行比對。這里,本文采用RA-CNN[15]方法對車輛進行細粒度分類,如果得到的細粒度分類結果相同,則認為事件信息中的車輛與自身攝像頭中的車輛一致。進一步地,本文將事件信息進行評分。這里,本文借鑒文獻[1]中的評分方式,當信息中的事件與實際事件相符合時,給信息評分為1;反之,評分為?1。此外,本文給予信息發送者一些容錯空間,當錯誤信息中的交通事件方向與真實的交通事件方向一致時,本文給錯誤信息的評分為0。例如,信息中的交通事件為左轉,而真實的交通事件為向左變道或掉頭,本文則認為信息的發送者只是預判出現了偏差,但同樣起到了給車輛良性的警示作用,所以不會給其過低的評分。
(3)“礦工”選舉
由于去中心化的網絡結構,區塊鏈網絡中并沒有恒定的中心,因此,需要定期選出一個“礦工”節點來生成新的區塊。在本文的系統中,每當有智能網聯汽車對某一車輛進行連續3次的評分后,區塊鏈網絡就會發起對于該車輛評分的“礦工”選舉。選舉發起后,區塊鏈網絡中每一個對于該車輛有過評分的節點會將自己對其的評分求平均值,而該網絡中的所有節點都將申請選舉“礦工”。每一個進行“礦工”選舉的節點會將自己計算的評分、自己在區塊鏈中記錄的信譽值以及自己的實時位置打包成數據包進行廣播。其他節點在收到該數據包后比對數據包中的信譽值與區塊鏈中記錄的該車輛信譽值是否一致,如果不相符,則丟棄該數據包。最終,“礦工”選舉者中評分最高的節點會成功當選。
當“礦工”選舉者中出現信譽度相同的節點時,附近車輛更多的節點會當選“礦工”。具體地,每輛收到數據包的智能網聯汽車會計算信譽度最高的評分節點到其余各節點距離的平方和,評分節點中值更小的一方會當選“礦工”。該平方和的距離定義如下。
其中,表示該區塊鏈網絡中節點的數量,x表示第個節點的經度值,x表示平分節點的經度值,y表示第個節點的緯度值,y表示平分節點的緯度值。
通過這種方式,信譽值最高的節點會當選“礦工”,這在較大程度上保證了“礦工”節點的可靠性。如果出現并列的信譽值最高節點,則從評分節點中選出值最小的當選“礦工”,這樣選出的“礦工”節點在智能網聯車隊中車輛更為密集的區域,從而保證“礦工”節點在生成新的區塊后能夠以較小的時延廣播給其他節點。
(4)生成新的區塊
在區塊鏈網絡中,針對某一節點,“礦工”節點會收到若干個關于它的評分,“礦工”節點通過計算可以得到一個關于該節點的最終信任值,其計算方法如下。

其中,表示對該事件進行評分的節點數量,c表示評分節點自身的信譽值,r表示該節點對事件的評分,block表示被評分的節點在存儲信譽信息的區塊鏈中最近一次存儲的評分。為調節因子,的大小代表區塊鏈之前存儲的信譽值在新一輪評分中所占的權重,其默認值為1。計算完成后,節點會將自己更新的信譽信息添加到存儲信任值的區塊鏈中,并將添加的區塊廣播到區塊鏈網絡的其他節點中。
一旦從“礦工”節點接收到塊,智能網聯汽車需要檢查其有效性,然后將其添加到區塊鏈中。有時,智能網聯汽車可能同時接收多個塊,在這種情況下,區塊鏈開始分叉。本文采用分布式共識方案解決此問題,每個智能網聯車隊選擇一個block并繼續在其后添加新塊。隨著時間的推移,由最大數量的智能網聯車隊承認的分支增長速度快于其他分支,最后,最長的一個鏈成為網絡的分布式共識,而其他鏈被丟棄。此外,每個區塊鏈節點需要收集自己在丟棄的分叉中生成的塊,并嘗試將其添加到區塊鏈中。通過這種方式,所有智能網聯汽車都存儲相同版本的區塊鏈,從而確保網絡的一致性。
4 實驗與評估
4.1 軌跡預測效果
本文在PyTorch上使用公開的NGSIM US-10和I-80數據集[16]進行實驗。每個數據集包含45 min時間跨度內以10 Hz捕獲的實際高速公路交通的軌跡,每個數據集由15 min的輕度擁擠、中度擁擠和擁擠交通狀況組成。本文將完整的數據集拆分為訓練集和測試集,測試集包括來自US-101和I-80數據集的3個子集。
本文將能通過5 s內預測軌跡與真實軌跡的均方誤差(RMSE)用來衡量模型的準確性,同時,將本文的模型與以下幾個模型進行對比。
(1)卡爾曼濾波(KF)模型
通過對輸入輸出數據進行觀測,排出噪聲和干擾,輸出較為線性的結果。
(2)高斯混合模型(VGMM)
學習動態車輛的駕駛行為模式并用于駕駛行為意圖檢測,最后將動態車輛駕駛行為意圖與運動模型結合進行軌跡預測。
(3)遞歸神經網絡(RNN)
利用遞歸神經網絡預測出車輛行駛意圖,在預測時不僅參考車輛自身的行駛軌跡,還考慮車輛周邊物體對其運動的影響。
表1展示了本文的LSTM模型與以上幾個參考模型的效果對比。相比于其他幾種模型,由于本文的LSTM能夠更多地考慮周邊環境對于車輛運動狀態的影響,所以能夠更加準確地預測5 s內車輛的行駛軌跡,且具有更低的RMSE值,尤其隨著預測時間越來越久,LSTM的優勢變得越來越明顯。
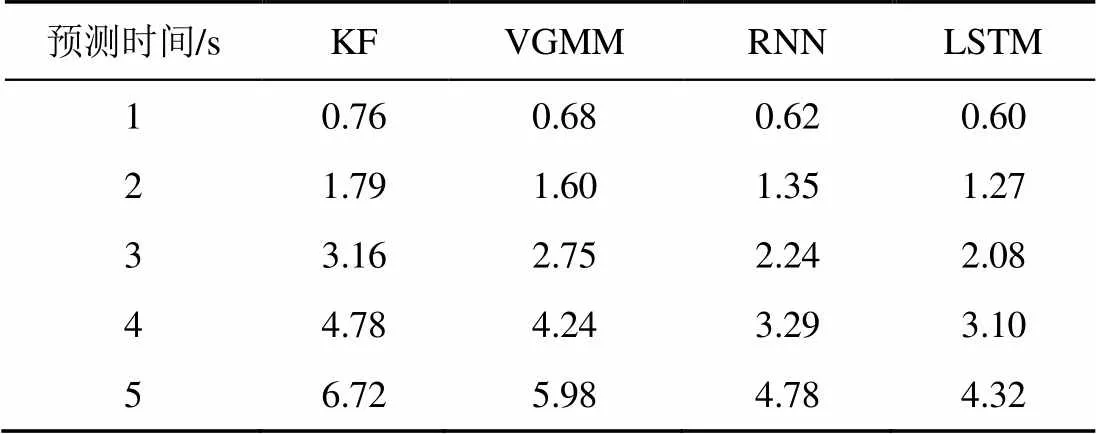
表1 不同模型的均方根誤差
4.2 安全性能分析
4.2.1 對抗惡意車輛
惡意車輛可能會向附近的鄰居車輛廣播虛假的消息,這會導致嚴重的交通事故或擁堵。在本文的系統中,每輛智能網聯汽車中都存有其他車輛的信譽值,智能網聯汽車可以根據該信譽值選擇性地對接收到的信息采取相應的措施。如果信息發送者的信譽值過低,那么智能網聯汽車的駕駛行為將不會做出任何改變,這大大保證了所用信息的可靠性。此外,一些惡意車輛可能會對一些信息進行不公平的評分,如對良好的信息發送者給予過低的評價。在本文的體系中,每個評分者在最終的信譽值生成中都享有一個權重,而該權重與評分者自身的信譽值直接相關,由于惡意車輛數量較少,且評分往往較低,所以其惡意評分很難影響到本文的信任管理機制。
4.2.2 對抗受損RSU
如果以路邊基礎設施為中心服務器,那么一些惡意用戶將很有可能對其發動攻擊,而一旦路邊基礎設施被攻陷,整個系統都將癱瘓。在本文的信任管理機制中,路邊基礎設施不會成為系統的中心服務器,它會以一個普通參與者的身份將自己捕獲到的交通信息分享給智能網聯車隊中的車輛。通過區塊鏈技術,系統不會過度依賴路邊基礎設施,不僅減小了通信時延,也保證了數據的安全性和可靠性,因為即使路邊基礎設施受到惡意攻擊,也不會對整個系統的運營造成太大影響。
4.3 系統效率
為了驗證本文系統的效率和及時性,本文基于Matlab搭建了車聯網及區塊鏈仿真平臺,并對系統中區塊的生成時間及信息利用率進行了相應的仿真。
4.3.1 區塊生成
評分完成后,區塊鏈網絡會進行“礦工”節點的選舉,而當選的“礦工”節點需要匯總各個節點的評分,并最終以此生成新的區塊。本文對這一過程進行了仿真實驗,并與文獻[1]中的方法進行了對比,得到了在不同數量的智能網聯汽車環境下,兩種方法從“礦工”選舉到生成區塊所用的時間,如圖4所示。
可以看出,由于文獻[1]中的區塊鏈網絡由所有的路邊基礎設施組成,該方法將大部分的計算任務以及區塊生成任務交由路邊基礎設施完成,路邊基礎設施需要計算每一輛車的信譽評分并為其生成區塊。因此,隨著該區域內汽車數量的增加,路邊基礎設施會處于超負荷的狀態,其區塊生成所需時間較大。相比于文獻[1]中的方法,本文中的區塊鏈由路邊基礎設施與智能網聯車隊所有的節點組成,路邊基礎設施與智能網聯車隊中任一車輛一樣,只是區塊鏈網絡中的一個節點,大量任務被下放到了各個智能網聯汽車中。因此,相較于文獻[1]中提出的方法,隨著交通環境中車輛數量的增長,本文方法生成區塊所用的時間增加較少,這使生成區塊具有較好的及時性,也保障了系統的工作效率。
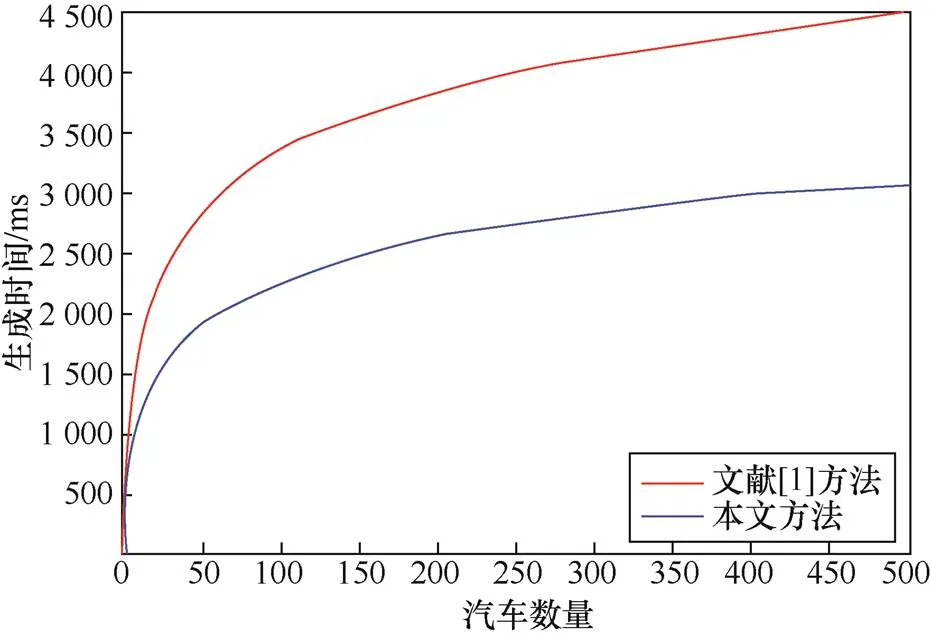
圖4 不同方法生成區塊的時間
Figure 4 Time to generate blocks by different methods
4.3.2 信息利用率
同樣地,當智能網聯車隊中車輛的節點數量不同,其接收信息的利用率也會有所不同,本文針對這一特點進行了仿真,結果如圖5所示。

圖5 不同節點數量下的信息利用率
Figure 5 Information utilization ratio under different number of nodes
可以看出,隨著智能網聯車隊中節點數量的增加,每輛車接收到信息的利用率會降低。這一結果與邏輯相吻合,當車隊過于龐大時,距離相隔較遠的車輛增多,每輛車接收到信息所描述的交通事件與自身關系不大。然而,現實中距離較近車輛的數量往往沒有那么龐大,因此,本文所建立車隊的節點數量一般在5~30,從圖中可以看出,在該范圍內,信息利用率相當可觀。
5 結束語
本文提出了智能網聯車隊中安全協同的意圖識別系統,利用LSTM模型,路邊基礎設施與智能網聯車隊中的每一個節點都可以對周圍車輛的行駛軌跡進行預判,并將預測結果進行分享。借助區塊鏈技術,智能網聯汽車可以對接收到的信息進行評分,而這些評分被匯總后存儲到區塊鏈中。通過這種方式,智能網聯汽車既能通過自己的軌跡預測模型進行車輛避讓,又可以選擇性地利用其他節點分享的信息,從而實現協同駕駛。
[1] BARRIOS C, MOTAI. Improving estimation of vehicle’s trajectory using the latest Y global positioning system with Kalman filtering[J]. IEEE Trans on Instru and Meas, 2011, 6(12): 3747-3755.
[2] 黃如林. 無人駕駛汽車動態障礙物避撞關鍵技術研究[D]. 合肥: 中國科學技術大學, 2017.
HUANG R L. Research on key technologies of dynamic obstacle avoidance for autonomous vehicle[D]. Hefei: University of Science and Technology of China, 2017.
[3] GINDELE T, BRECHTEL S, DILLMANN R. Learning driver behavior models from traffic observations for decision making and planning[J]. IEEE Intelligent Transportation System Magazine, 2015, 7(1): 69-79.
[4] LEE N, CHOI W, VERNAZA P, et al. DESIRE: distant future prediction in dynamic scenes with interacting agents[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). 2017: 2165-2174.
[5] KIM B, KANG C M S. LEE H, et al. Probabilistic vehicle trajectory prediction over occupancy grid map via recurrent neural network. arXiv preprint [J]. arXiv:1704.07049, 2017.
[6] LI Q, MALI A, MARTIN K M, et al. A reputation-based announcement scheme for VANETs[J]. IEEE Transactions on Vehicular Technology, 2012,61(9): 4095-4108.
[7] LI W, SONG H. Information-oriented trustworthiness evaluation in vehicular ad-hoc networks[C]//International Conference on Network and System Security. 2013: 94-108.
[8] YANG Z, YANG K, LEI L, et al. Blockchain based decentralized trust management in vehicular networks[J]. IEEE Internet of Things Journal, 2018.
[9] 戴婕. 基于密鑰管理和無中心化加密的網聯汽車信息安全的設計與實現[D]. 北京: 北京郵電大學, 2018.
DAI J. Design and implementation of vehicular information security based on key management and decentralized encryption[D]. Beijing: Beijing University of Posts and Telecommunication, 2018.
[10] ALAHI A, GOEL K, RAMANATHAN V, et al. Social LSTM: human trajectory prediction in crowded spaces[C]//IEEE Conference on Computer Vision and Pattern Recognition. 2016: 961-971.
[11] DEO N, TRIVEDI M M. Multi-modal trajectory prediction of surrounding vehicles with Maneuver based LSTMs[C]//2018 IEEE Intelligent Vehicles Symposium (IV). 2018: 1179-1184.
[12] KINGMA D P, BA J. Adam: a method for stochastic optimization[J]. arXiv preprint arXiv:1412.6980, 2014.
[13] REDMON J, FARHADI A. YOLO9000: better, faster, stronger[J]. arXiv preprint arXiv:1612.08242, 2016.
[14] WOJKE N, BEWLEY A, PAULUS D. Simple online and realtime tracking with a deep association metric[C]//2017 IEEE International Conference on Image Processing (ICIP). 2017.
[15] FU J, ZHENG H, MEI T. Look closer to see better: recurrent attention convolutional neural network for fine-grained image recognition[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). 2017: 4476-4484.
[16] COLYAR J, HALKIAS J. US highway 101 dataset. Federal highway Administration (FHWA)[R]. 2007.
Cooperative trajectory prediction system for intelligent and automated connected convoy based on blockchain
WANG Rensheng, WU Tianhao, ZHANG Lin, ZHU Konglin
School of Information and Communication Engineering, Beijing University of Posts and Telecommunication, Beijing 100876, China
Autonomous vehicles have been extensively researched and developed rapidly in recent years. However, these vehicles may be not able to avoid collision with vehicles that appear suddenly. To solve this problem, a cooperative trajectory prediction system for intelligent and automated connected convoy based on blockchain was proposed. In the proposed system, each node in the intelligent and automated connected convoy and roadside infrastructure predict the trajectory of vehicles around them with the LSTM model, and they share the information they get. Using blockchain, the intelligent and automated connected convoy and roadside infrastructure rate the received messages. The summarized rating will be stored as a block in the blockchain that stores the trust values. Vehicles in the intelligent and automated connected convoy are able to judge whether the other nodes in the Conroy are credible according to their trust value, and messages from the low trust value sender will be ignored, thus achieving cooperative driving. Experiment shows that the proposed system plays a significant role in improving driving safety of the intelligent connected platoon.
intelligent and automated connected convoy, trajectory prediction, LSTM, trust management, blockchain
TP393
A
10.11959/j.issn.2096?109x.2020015
2019?05?20;
2019?07?08
王仁生,wangrensheng@bupt.edu.cn
國家重點研發計劃基金(2016YFB0100902)
The National Key R&D Program of China (2016YFB0100902)
論文引用格式:王仁生, 吳天昊, 張琳, 等. 基于區塊鏈的智能網聯車隊協同軌跡預測系統[J]. 網絡與信息安全學報, 2020, 6(3): 78-87.
WANG R S, WU T H, ZHANG L, et al. Cooperative trajectory prediction system for intelligent and automated connected convoy based on blockchain[J]. Chinese Journal of Network and Information Security, 2020, 6(3): 78-87.
王仁生(1994?),男,山東煙臺人,北京郵電大學碩士生,主要研究方向為智能網聯汽車。

吳天昊(1992?),男,山東濟南人,北京郵電大學博士生,主要研究方向為C-V2X通信技術及應用。
張琳(1974?),男,上海人,博士,北京郵電大學教授、博士生導師,主要研究方向為超寬帶生物雷達成像及生命信號檢測、網絡信息處理、車聯網。

朱孔林(1985?),男,山東臨沂人,博士,北京郵電大學副教授,主要研究方向為智能網聯汽車。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華手工(2017年2期)2017-06-06 23:00:31
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中外會展(2014年4期)2014-11-27 07:46:46
中學數學雜志(初中版)(2006年1期)2006-12-29 00:00:00
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32