基于小波降噪的雷達(dá)時(shí)頻信號(hào)互相關(guān)測(cè)速算法
2020-06-19 07:50:33李佳曹林王東峰付沖
現(xiàn)代電子技術(shù) 2020年9期
李佳 曹林 王東峰 付沖
摘? 要: 為提高基于FMCW體制的雙波束車(chē)流量雷達(dá)的測(cè)速精度,對(duì)其信號(hào)特征進(jìn)行分析,結(jié)合Burg和廣義互相關(guān)理論,提出基于小波降噪的時(shí)頻信號(hào)互相關(guān)測(cè)速算法(CC?BWT)。首先,利用最大熵功率譜估計(jì)的Burg方法得到雷達(dá)回波的頻譜信息,通過(guò)CFAR檢測(cè)出目標(biāo)車(chē)輛后提取車(chē)輛的時(shí)頻信號(hào);然后,對(duì)時(shí)頻信號(hào)進(jìn)行小波分解,以改進(jìn)的閾值函數(shù)作為降噪依據(jù)進(jìn)行信號(hào)重構(gòu),之后兩路信號(hào)做互相關(guān),估計(jì)出時(shí)延,從而測(cè)得車(chē)輛速度。結(jié)合仿真和實(shí)測(cè)數(shù)據(jù),并與相位法和雙譜法進(jìn)行對(duì)比,驗(yàn)證了該算法的測(cè)速準(zhǔn)確度達(dá)到96%以上且算法魯棒性好。
關(guān)鍵詞: 互相關(guān)測(cè)速; 時(shí)頻信號(hào)提取; 小波降噪; 最大熵譜估計(jì); 信號(hào)重構(gòu); 車(chē)輛測(cè)速
中圖分類(lèi)號(hào): TN957.51?34? ? ? ? ? ? ? ? ? ? ? ?文獻(xiàn)標(biāo)識(shí)碼: A? ? ? ? ? ? ? ? ? ? ? ? ?文章編號(hào): 1004?373X(2020)09?0014?07
Wavelet denoising based cross?correlation velocity detection algorithm
of radar time?frequency signal
LI Jia1, CAO Lin1, WANG Dongfeng2, FU Chong3
(1. Department of Communication Engineering, Beijing Information Science & Technology University, Beijing 100101, China;
2. Beijing TransMicrowave Science and Technology Co., Ltd., Beijing 100018, China;
3. School of Computer Science and Engineering, Northeastern University, Shenyang 110004, China)
Abstract: The signal features of FMCW (frequency modulated continuous wave) are analyzed to improve the accuracy of FMCW system based speed detection of dual?beam vehicle flowrate radar. In combination with the Burg and generalized cross?correlation theory, a time?frequency signal cross?correlation algorithm based on Burg and wavelet transform (CC?BWT) is proposed. Firstly, the frequency spectrum information of radar echo is obtained with the Burg method based on the maximum entropy power spectrum estimation and the time?frequency signal of the vehicle is extracted after the target vehicle is detected with CFAR. And then, the time?frequency signal is subjected to wavelet decomposition to reconstruct the signal by taking the improved threshold function as the denoising basis, then the two signals are correlated for the estimation of the delay and the vehicle speed is obtained finally. It is compared with the phase method and the bispectrum method in combination with the simulation and measured data. The comparison results verify that the speed detection accuracy of the algorithm is above 96% and its robustness is good.
Keywords: cross?correlation velocity detection; time?frequency signal extraction; wavelet denoising; MESE; signal reconstruction; vehicle velocity detection
0? 引? 言
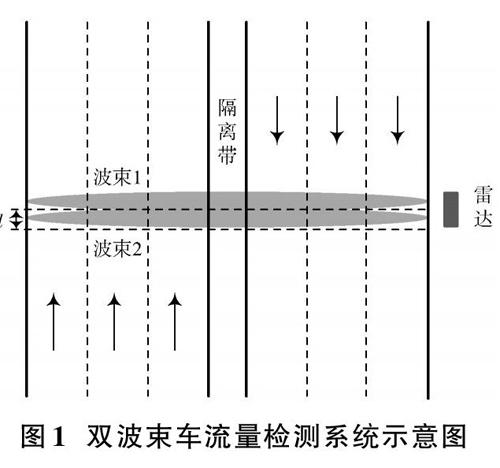
雙波束雷達(dá)[1]測(cè)速原理如圖1所示,利用車(chē)輛經(jīng)過(guò)兩個(gè)波束的時(shí)間差[τ]和兩個(gè)波束的間距[d]計(jì)算車(chē)輛的速度[v],公式可以簡(jiǎn)化理解為:
[v=dτ]? (1)
目前,應(yīng)用到車(chē)流量雷達(dá)測(cè)速的方法有以下幾種:利用雷達(dá)處理機(jī)內(nèi)部定時(shí)器記錄車(chē)輛駛離雷達(dá)照射區(qū)域時(shí)間,利用距離變化率測(cè)速,相位法、雙譜法和廣義互相關(guān)法[2]等。這些方法的共同點(diǎn)是通過(guò)車(chē)輛經(jīng)過(guò)兩個(gè)雷達(dá)照射區(qū)域的時(shí)間差來(lái)間接計(jì)算車(chē)速。近年來(lái)提出了很多關(guān)于時(shí)延估計(jì)的改進(jìn)算法,如基于馬爾科夫鏈蒙特卡洛的時(shí)延估計(jì)方法[3]、基于最小均方誤差的自適應(yīng)時(shí)延估計(jì)方法[2]、基于匹配追蹤的稀疏重構(gòu)時(shí)延估計(jì)算法[4]、奇異值分解的HB加權(quán)廣義互相關(guān)時(shí)延估計(jì)[5]、基于中國(guó)余數(shù)定理的跳頻信號(hào)時(shí)延估計(jì)方法[6]、基于雙通道DFRFT互譜法的Chirp信號(hào)時(shí)延估計(jì)[7]、基于頻率加權(quán)的時(shí)延估計(jì)算法[8]等。這些方法有效地改進(jìn)了時(shí)延估計(jì)的精度,但是不能用于信噪比低或非平穩(wěn)信號(hào)的環(huán)境,有時(shí)甚至需要知道信號(hào)和噪聲的先驗(yàn)知識(shí),這些往往不易獲得。在實(shí)際應(yīng)用的場(chǎng)景中,路面的雜波干擾以及運(yùn)動(dòng)目標(biāo)強(qiáng)度的不斷變化,使得實(shí)際接收到的雷達(dá)信號(hào)是非平穩(wěn)的,且和噪聲相關(guān)。
本文提出一種基于Burg和小波變換的時(shí)頻信號(hào)互相關(guān)算法(Cross Correlation Algorithm Based on Burg and Wavelet Transform,CC?BWT),利用Burg算法及CFAR檢測(cè)出目標(biāo)車(chē)輛,提取出目標(biāo)車(chē)輛時(shí)頻信號(hào)后進(jìn)行小波降噪,對(duì)降噪后的I,Q兩路目標(biāo)車(chē)輛的時(shí)頻信號(hào)做互相關(guān),求出時(shí)延并測(cè)速。該方法提高了信噪比,增加了信號(hào)互相關(guān)的估計(jì)精度,能有效提高測(cè)速準(zhǔn)確率。
1? CC?BWT算法
本文測(cè)速算法流程圖如圖2所示,分為車(chē)輛時(shí)頻信號(hào)提取和時(shí)延估計(jì)兩部分。
2? 獲取目標(biāo)車(chē)輛時(shí)頻信號(hào)特征
獲取目標(biāo)車(chē)輛的時(shí)頻信號(hào)特征是進(jìn)行車(chē)速測(cè)量的必要準(zhǔn)備。本文的實(shí)驗(yàn)載體是北京川速微波科技有限公司的雙波束車(chē)流量交通雷達(dá),主要應(yīng)用于城市交通道路,用于車(chē)流量統(tǒng)計(jì)和車(chē)速檢測(cè)。
2.1? 雷達(dá)初始數(shù)據(jù)
雙波束車(chē)流量雷達(dá)采用調(diào)頻連續(xù)波(Frequency Modulated Continuous Wave,F(xiàn)MCW)體制[9?10],發(fā)射波為頻率隨時(shí)間變化的鋸齒波,其測(cè)距公式如下:
[R=cTΔf2B]? (2)
式中:[R]為雷達(dá)到目標(biāo)的距離;[c]為光速;[T]為發(fā)射信號(hào)周期;[Δf]為發(fā)射信號(hào)和接收信號(hào)的差頻;[B]為信號(hào)帶寬。
雷達(dá)側(cè)向安裝于道路一側(cè),其照射區(qū)域可以覆蓋多個(gè)車(chē)道,如圖3所示。
雙波束雷達(dá)采集的回波數(shù)據(jù)每[N]個(gè)數(shù)據(jù)為一幀,一共[M]幀,經(jīng)處理后的數(shù)據(jù)樣本集合為[x(n)={x(1),x(2),…,x(M);x(i)∈RN}]。其中,[x(i)]代表第[i]幀的[N]個(gè)數(shù)據(jù)。
2.2? 基于AR模型的Burg算法
AR模型參數(shù)求解以線性預(yù)測(cè)理論[11]為基礎(chǔ),發(fā)展了很多的算法,主要有Yule?Walker法、協(xié)方差法、Burg法和改進(jìn)的協(xié)方差法,Burg算法以其良好的分辨率和穩(wěn)定性獲得廣泛應(yīng)用。
Burg算法主要是先根據(jù)前向和后向預(yù)測(cè)誤差功率的平均值最小準(zhǔn)則估計(jì)出反射系數(shù),定義前向和后向誤差分別為[ef(n)]和[eb(n)],令前向和后向預(yù)測(cè)誤差平均功率之和為最小,得到:
[efm(n)=efm-1(n)+kmebm(n)ebm(n)=ebm-1(n-1)+k*mefm-1(n)ef0(n)=x(n)] (3)
式中:[km]為反射系數(shù),[k*m]為[km]的共軛;[efm(n)]為[m]階前向預(yù)測(cè)誤差;[ebm(n)]為[m]階后向預(yù)測(cè)誤差。
可求出反射系數(shù)如下:
[km=-2n=mN-1efm-1(n)eb*m-1(n-1)n=mN-1efm-1(n)2+n=mN-1ebm-1(n-1)2] (4)
式中:[m=1,2,…,p],[p]為模型的階數(shù)。
用Levinson遞推算法,由反射系數(shù)求出AR模型參數(shù),計(jì)算功率譜密度為:
[P(ω)=σ211+k=1pake-iωk2] (5)
式中:[p]為模型的階數(shù);[ak]為AR模型參數(shù)。
2.3? CFAR檢測(cè)及目標(biāo)車(chē)輛判斷
恒虛警檢測(cè)(Constant False Alarm Rate,CFAR)算法根據(jù)信號(hào)的特征得到一個(gè)自適應(yīng)動(dòng)態(tài)門(mén)限,使雷達(dá)的虛警率保持不變,從而使雷達(dá)具有良好的檢測(cè)性能[12]。
將雷達(dá)每幀信號(hào)的頻譜能量信息作為恒虛警檢測(cè)方法的輸入信號(hào)[f],通過(guò)[fi]左右各[L]單元[{fi-L,…,][fi-1,fi,fi+1,…,fi+L}] ,計(jì)算此時(shí)雜波背景的均值估計(jì)[μ]:
[μ=1(2L+1)n=-LLxi+n] (6)
式中[μ]為通過(guò)恒虛警得到的基本閾值。
因此,可以把檢測(cè)門(mén)限定義為:
[U0=Cμ] (7)
式中[C]為檢測(cè)門(mén)限的乘性因子,用于調(diào)節(jié)虛警率。
當(dāng)連續(xù)多幀被檢測(cè)為目標(biāo)時(shí),認(rèn)為此時(shí)有目標(biāo)車(chē)輛經(jīng)過(guò)雷達(dá)照射區(qū)域,將一輛車(chē)行駛過(guò)程的時(shí)頻信息記為如下表達(dá)式:
[X(j)=(f(j)1,f(j)2,…,f(j)M)] (8)
式中:[f(j)i]表示第[i]幀信號(hào)在[j]頻點(diǎn)的頻譜幅度值;[X(j)]表示每幀信號(hào)在[j]頻點(diǎn)的頻譜幅度集合。此處頻點(diǎn)[j]代表目標(biāo)車(chē)輛距離雷達(dá)的距離信息,不同頻點(diǎn)代表車(chē)輛所在的車(chē)道不同;幀號(hào)代表時(shí)間信息。因此,[X(j)]表示在第[j]頻點(diǎn)所對(duì)應(yīng)的車(chē)道上,車(chē)輛經(jīng)過(guò)雷達(dá)照射區(qū)域時(shí)的時(shí)間?頻率信號(hào)特征。
2.4? 提取時(shí)頻信號(hào)的算法流程
獲取目標(biāo)車(chē)輛時(shí)頻信號(hào)特征的流程圖如圖4所示。
獲取目標(biāo)車(chē)輛時(shí)頻信號(hào)特征的主要步驟如下:
1) 雷達(dá)數(shù)據(jù)初始化預(yù)處理,通道分離成[I,Q]兩路,之后去除噪聲、直流、畸變點(diǎn),并加窗。
2) 對(duì)預(yù)處理后的數(shù)據(jù)利用Burg算法處理,得到回波信號(hào)的頻譜能量信息[f]。
3) 對(duì)頻譜信號(hào)進(jìn)行CFAR目標(biāo)檢測(cè),及多幀目標(biāo)匹配,以確定目標(biāo)車(chē)輛[k]。
4) 對(duì)于確定為目標(biāo)的車(chē)輛,提取車(chē)輛的時(shí)頻信號(hào)特征[X(j)I],[X(j)Q]。
利用Burg方法處理雷達(dá)回波數(shù)據(jù)后得到的頻譜三維圖如圖5所示。圖中兩個(gè)能量較高的包絡(luò)是行駛的車(chē)輛信號(hào),坐標(biāo)點(diǎn):(12,1 600+:1 800-),(27,1 200+:1 500-)表示在12頻點(diǎn)對(duì)應(yīng)的車(chē)道,車(chē)輛在1 600幀處駛?cè)肜走_(dá)照射區(qū)域,在1 800幀處駛離雷達(dá)照射區(qū)域。在27頻點(diǎn)對(duì)應(yīng)的車(chē)道,車(chē)輛在1 200幀處駛?cè)肜走_(dá)照射區(qū)域,在1 500幀處駛離雷達(dá)照射區(qū)域。
分析時(shí)頻信號(hào)[X(27)I],[X(27)Q],如圖6所示。[I],[Q]兩路信號(hào)之間時(shí)頻特性基本一致,只是在時(shí)間上略有延遲。
3? 時(shí)延估計(jì)
本節(jié)主要介紹CC?BWT算法的第二步,即對(duì)提取的車(chē)輛時(shí)頻信號(hào)進(jìn)行時(shí)延估計(jì)。 首先分析傳統(tǒng)廣義互相關(guān)算法的不足,然后通過(guò)小波降噪并改進(jìn)閾值函數(shù)的方式改進(jìn)原有算法,并給出實(shí)現(xiàn)流程。
3.1? 廣義互相關(guān)算法的不足
廣義互相關(guān)算法是一種簡(jiǎn)單、高效的時(shí)延估計(jì)方法,被廣泛應(yīng)用于各種工業(yè)場(chǎng)景中。
廣義互相關(guān)時(shí)延估計(jì)算法是以空間上互相獨(dú)立的兩個(gè)接收信號(hào)[x1(t)],[x2(t)]為基礎(chǔ),利用互相關(guān)系數(shù)大小來(lái)衡量?jī)蓚€(gè)時(shí)間序列在不同時(shí)刻的相似程度。假設(shè)接收信號(hào)如下:
[x1(t)=s(t)+n1] (9)
[x2(t)=s(t-D)+n2] (10)
兩個(gè)接收信號(hào)的互相關(guān)函數(shù)為:
[Rx1x2=E{x1(t)x2(t+τ)}=Rss(τ-D)] (11)
式中:[s(t)]為源信號(hào);[n]為噪聲;[D]為延遲時(shí)間。
在[τ=D]處可以檢測(cè)出一個(gè)峰值,利用此峰值可以計(jì)算出延遲時(shí)間。
在本文的應(yīng)用場(chǎng)景中,直接采用廣義互相關(guān)算法來(lái)進(jìn)行時(shí)延估計(jì)是不合適的。該方法采用的是兩個(gè)傳感器采集的時(shí)域信號(hào)直接進(jìn)行互相關(guān)處理,只有當(dāng)信號(hào)是平穩(wěn)的且信號(hào)和噪聲是相互獨(dú)立的情況下才能較精確地估計(jì)出延遲時(shí)間。
在雷達(dá)實(shí)際應(yīng)用場(chǎng)景中,地面干擾、周?chē)ㄖ锔蓴_、鄰車(chē)道干擾等,使得接收到的雷達(dá)回波信號(hào)非平穩(wěn)且和噪聲相關(guān)。因此,本文利用小波降噪和廣義互相關(guān)的理論,以目標(biāo)車(chē)輛時(shí)頻信號(hào)為基礎(chǔ)進(jìn)行時(shí)延估計(jì)。
3.2? 基于小波降噪的時(shí)頻信號(hào)互相關(guān)算法流程
通過(guò)上節(jié)的分析可知,目標(biāo)車(chē)輛的時(shí)頻信息代表在某車(chē)道上一段時(shí)間內(nèi)目標(biāo)車(chē)輛的頻譜能量集合。在這個(gè)頻譜能量集合中包含有目標(biāo)車(chē)輛的頻譜能量、噪聲帶來(lái)的頻譜能量及頻譜泄露的影響。為降低噪聲頻譜能量及頻譜泄露的影響,提出基于小波降噪的時(shí)頻信號(hào)互相關(guān)算法,進(jìn)行一層小波分解的步驟如下:
1) 利用上一節(jié)中提到的獲取目標(biāo)車(chē)輛時(shí)頻信號(hào)特征的方法提取[XI],[XQ]。
2) 利用選定的小波函數(shù)對(duì)夾雜有目標(biāo)車(chē)輛和噪聲的時(shí)頻信號(hào)進(jìn)行[N]([N=1,2,…])層分解,分解成低頻部分[cai]和高頻部分[cdi](通過(guò)對(duì)實(shí)際信號(hào)的分析,車(chē)輛目標(biāo)的時(shí)頻特征對(duì)應(yīng)低頻部分,噪聲的時(shí)頻特征對(duì)應(yīng)高頻部分),之后逐層對(duì)低頻(目標(biāo)車(chē)輛信息)進(jìn)行分解。分解層數(shù)的確定依據(jù)重構(gòu)信號(hào)是否接近于車(chē)輛信號(hào)的時(shí)頻信息。
3) 時(shí)頻信號(hào)的離散小波變換定義為:
[ψm,n(t)=a-12ψm,n(a-m0t-nb0)] (12)
[wI=DWT(am0,nb0am0)=(XI,ψm,n(t))] (13)
[wQ=DWT(am0,nb0am0)=(XQ,ψm,n(t))] (14)
式中:[a]為尺度因子;[b]為平移因子;[ψm,n(t)]為離散小波基。
4) 對(duì)高頻部分進(jìn)行閾值處理,得到降噪后的高頻系數(shù)[cd′i]。
根據(jù)雷達(dá)時(shí)頻信號(hào)小波變換后的特點(diǎn),對(duì)其閾值函數(shù)做了改進(jìn),閾值函數(shù)的降噪程度依賴于信號(hào)的分解層數(shù),閾值函數(shù)[CDi,]定義如下:
[λ=σ2log N] (15)
[CDi=sgn(cdi)cdi-λ/i,? ? cdi≥λi0,? ? cdi≥λi] (16)
式中:[N]為信號(hào)長(zhǎng)度;[σ]為信號(hào)噪聲強(qiáng)度;[i]為當(dāng)前信號(hào)的分解層數(shù)。
信號(hào)在不同分解層數(shù)下的閾值函數(shù)對(duì)比如圖7所示,分解層數(shù)越高,降噪越不明顯。
5) 將低頻車(chē)輛時(shí)頻信號(hào)部分和閾值處理后的高頻噪聲部分進(jìn)行逐層重構(gòu),直到恢復(fù)降噪后的信號(hào)[w′I] 和[w′Q]。
6) 對(duì)小波降噪后的時(shí)頻信號(hào)求互相關(guān)性,記為:
[R(k)=1Mm=0M-1w′I(m)w′Q(m+k)] (17)
相關(guān)結(jié)果如圖8所示,[R(k)]最大峰值處所對(duì)應(yīng)的橫坐標(biāo)記為[kmax]。
7) 計(jì)算車(chē)速,如下所示:
[v=dt=dτ×ε=d(kmax-M)×ε] (18)
式中:[M]為總幀數(shù);[ε]為兩幀之間的中斷時(shí)間;[d]為兩天線之間的距離。
I,Q兩路車(chē)輛時(shí)頻信息進(jìn)行小波降噪過(guò)程如圖9所示。
4? 路測(cè)數(shù)據(jù)驗(yàn)證結(jié)果
將本文算法寫(xiě)入車(chē)流量雷達(dá)DSP模塊中,以進(jìn)行實(shí)際路測(cè)。觀察車(chē)流量雷達(dá)系統(tǒng)工作的性能情況,連接相機(jī),統(tǒng)計(jì)分析車(chē)輛有效識(shí)別率和車(chē)速測(cè)量準(zhǔn)確率。同時(shí),采集數(shù)據(jù)進(jìn)行Matlab仿真,與實(shí)測(cè)情況相互對(duì)比,驗(yàn)證算法的可行性。
測(cè)試場(chǎng)景為城市道路,一共六車(chē)道,中間存在一個(gè)隔離帶,將車(chē)流量雷達(dá)系統(tǒng)安裝到道路一側(cè)。
4.1? 車(chē)輛目標(biāo)信號(hào)提取效果驗(yàn)證
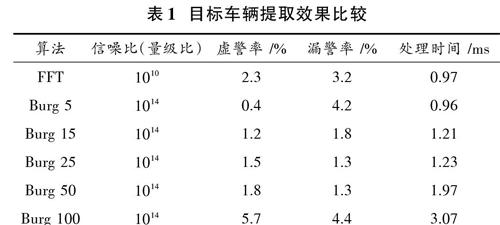
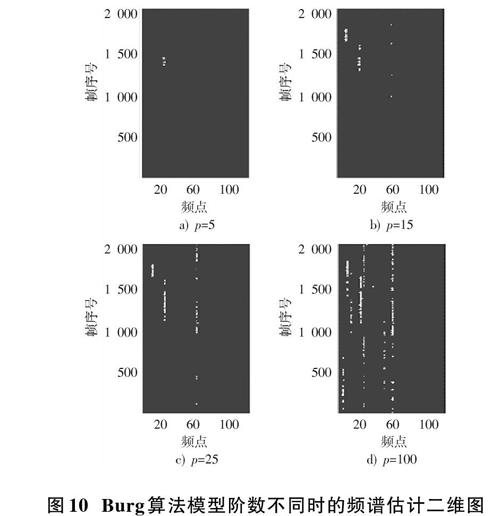
對(duì)實(shí)測(cè)數(shù)據(jù)進(jìn)行車(chē)輛目標(biāo)信號(hào)提取,在獲取車(chē)輛信號(hào)頻譜時(shí)分別采用FFT方法和Burg方法,Burg方法又分別采用了不同的階數(shù),分別為[p=5],[p=15],[p=25],[p=50],[p=100],對(duì)比結(jié)果如表1所示。由表1可知:Burg算法的信噪比明顯高于FFT方法,較高的信噪比對(duì)于信號(hào)檢測(cè)非常有利。隨著B(niǎo)urg算法模型階數(shù)的提高,信號(hào)的分辨率也逐漸提高,但是當(dāng)階數(shù)過(guò)低([p=5])時(shí)分辨率較低,造成漏警率較高;階數(shù)過(guò)高([p=100])時(shí)容易出現(xiàn)譜峰分裂,出現(xiàn)大量虛假譜峰,無(wú)法正確判斷車(chē)輛,造成虛警率和漏警率都很高。頻譜特征如圖10所示,在12和27頻點(diǎn)存在兩輛車(chē)。綜合考慮信噪比、虛警率、漏警率和處理時(shí)間,采用[p=25]階的Burg模型算法獲取車(chē)輛時(shí)頻信息。
[漏警率=CFAR漏檢車(chē)輛數(shù)實(shí)際車(chē)輛數(shù)] (19)
[虛警率=CFAR多檢車(chē)輛數(shù)實(shí)際車(chē)輛數(shù)] (20)
4.2? 基于小波降噪的時(shí)頻信號(hào)互相關(guān)算法驗(yàn)證
由于不同的分解層次對(duì)信號(hào)降噪效果有著直接的影響,當(dāng)噪聲較大時(shí),目標(biāo)車(chē)輛的時(shí)頻信號(hào)信噪比較低,利用本文提出的基于信號(hào)分解層次的閾值函數(shù)降噪時(shí),能準(zhǔn)確地重構(gòu)信號(hào),如圖11所示。
定義測(cè)速準(zhǔn)確率為:
[δ=1-v-vv×100%] (21)
式中:[v]是車(chē)輛的真實(shí)速度;[v]是計(jì)算出的速度。
在不同小波基的作用下,測(cè)速結(jié)果表現(xiàn)不一樣。基于coif小波降噪的時(shí)頻信號(hào)互相關(guān)性具有很好的估計(jì)精度,測(cè)速準(zhǔn)確率達(dá)到96%以上,如圖12所示。
為驗(yàn)證基于小波降噪的時(shí)頻信號(hào)互相關(guān)算法的準(zhǔn)確率,利用實(shí)測(cè)數(shù)據(jù)對(duì)比時(shí)域信號(hào)互相關(guān)算法和未經(jīng)過(guò)小波降噪的時(shí)頻信號(hào)互相關(guān)算法,如表2所示。通過(guò)對(duì)比可以發(fā)現(xiàn),在實(shí)測(cè)信號(hào)中由于地面雜波干擾較大,時(shí)域信號(hào)互相關(guān)算法并不能估計(jì)出實(shí)際車(chē)速,而時(shí)頻信號(hào)互相關(guān)算法能估計(jì)出實(shí)際車(chē)速。未經(jīng)過(guò)小波降噪的時(shí)頻信號(hào)互相關(guān)算法估計(jì)出的車(chē)速平均準(zhǔn)確率為90.0%,均方誤差為12.3。基于小波降噪的時(shí)頻信號(hào)互相關(guān)算法的測(cè)速平均準(zhǔn)確率為96.7%,均方誤差為7.96。可見(jiàn),基于小波降噪的時(shí)頻信號(hào)互相關(guān)算法的測(cè)速準(zhǔn)確率較高,且魯棒性較好。
4.3? 算法整體驗(yàn)證
考慮到國(guó)內(nèi)該類(lèi)產(chǎn)品仍處于研發(fā)階段并涉及商業(yè)機(jī)密,關(guān)于FMCW體制的雙波束車(chē)流量雷達(dá)精準(zhǔn)測(cè)速的實(shí)際工程結(jié)果較少,因此將本文提出的CC?BWT和另外兩種具有代表性的相位法和雙譜法做對(duì)比。針對(duì)車(chē)速快、慢的不同場(chǎng)景,分別進(jìn)行了10組數(shù)據(jù)的仿真,每組數(shù)據(jù)有50個(gè)車(chē)輛信息,求每組數(shù)據(jù)的測(cè)速準(zhǔn)確率平均值,其結(jié)果如圖13所示。
雙譜法和相位法的估計(jì)精度低,本文算法有較好的穩(wěn)定性,無(wú)論是車(chē)輛快速行駛還是慢速行駛,都能保證較高的測(cè)速準(zhǔn)確率,均高于96%。
4.4? 實(shí)際路測(cè)
測(cè)試設(shè)備:PC、雷達(dá)、相機(jī)、傳輸線等;測(cè)試地點(diǎn):某城市道路。
測(cè)試步驟如下:
1) 將雷達(dá)安裝于道路一側(cè),調(diào)整安裝角度,使雷達(dá)照射區(qū)域與車(chē)道方向垂直,并連接相機(jī)和PC。
2) 通過(guò)上位機(jī)設(shè)置雷達(dá)參數(shù)。上位機(jī)界面如圖14所示,分別為參數(shù)設(shè)置區(qū)、通信數(shù)據(jù)區(qū)、車(chē)道模擬區(qū)。
3) 將雷達(dá)調(diào)整為工作模式,對(duì)行駛的車(chē)輛進(jìn)行抓拍和測(cè)速,并保存原始數(shù)據(jù),抓拍照片和視頻用于后續(xù)統(tǒng)計(jì)分析和校正。
4) 對(duì)不同車(chē)速情況下重復(fù)上述三個(gè)步驟。
表3中分為三組采集數(shù)據(jù),可以看出不管是在車(chē)速較慢還是在車(chē)速較快的情況下,都能保證95%以上的正確統(tǒng)計(jì)率和96%以上的測(cè)速精度。
5? 結(jié)? 語(yǔ)
本文通過(guò)對(duì)車(chē)流量雷達(dá)信號(hào)特點(diǎn)的分析,提出基于小波降噪的時(shí)頻信號(hào)互相關(guān)測(cè)速算法,改善了雙波束車(chē)流量雷達(dá)車(chē)輛檢測(cè)率低和測(cè)速精度不高的問(wèn)題。通過(guò)系統(tǒng)仿真和實(shí)際道路測(cè)試,本車(chē)流量雷達(dá)對(duì)于不同速度場(chǎng)景下的測(cè)速準(zhǔn)確率均能達(dá)到96%以上,算法魯棒性好。這對(duì)于車(chē)流量交通雷達(dá)的推廣應(yīng)用具有很大的現(xiàn)實(shí)意義,能夠更充分地幫助交通管理部門(mén)檢測(cè)道路交通情況,推進(jìn)我國(guó)智能交通系統(tǒng)的建設(shè)。
參考文獻(xiàn)
[1] 陳紅江,張浩,湯灝,等.雙天線雷達(dá)測(cè)速儀的研發(fā)[J].中國(guó)測(cè)試,2017,43(6):75?78.
[2] 劉玉佩.基于自適應(yīng)時(shí)延估計(jì)的管道漏水定位方法研究[D].呼和浩特:內(nèi)蒙古大學(xué),2018.
[3] 李晶,趙擁軍,李東海.基于馬爾科夫鏈蒙特卡羅的時(shí)延估計(jì)算法[J].物理學(xué)報(bào),2014,63(13):67?73.
[4] 崔維嘉,張鵬,巴斌.基于循環(huán)匹配追蹤的稀疏重構(gòu)時(shí)延估計(jì)算法[J].電子與信息學(xué)報(bào),2018,41:1?7.
[5] 齊小剛,袁列萍,劉麗芳.奇異值分解的HB加權(quán)廣義互相關(guān)時(shí)延估計(jì)[J].信號(hào)處理,2018,34(10):1160?1168.
[6] 趙培焱,歐陽(yáng)鑫信,鵬華峰.基于中國(guó)余數(shù)定理的跳頻信號(hào)相時(shí)延估計(jì)方法[J].電子與信息學(xué)報(bào),2018,40(3):656?662.
[7] 李昕.基于雙通道DFRFT互譜法的Chirp信號(hào)時(shí)延估計(jì)[J].電子學(xué)報(bào),2014,42(6):1068?1073.
[8] 鄭恩明,陳新華,孫長(zhǎng)瑜.基于頻率方差加權(quán)的時(shí)延差估計(jì)方法[J].系統(tǒng)工程與電子技術(shù),2014,36(2):224?229.
[9] 王元愷,肖澤龍,許建中,等.一種改進(jìn)的FMCW雷達(dá)線性調(diào)頻序列波形[J].電子學(xué)報(bào),2017,45(6):1288?1293.
[10] 邢自然,朱冬晨,金星.一種多目標(biāo)FMCW雷達(dá)的高效距離速度測(cè)量[J].電子學(xué)報(bào),2016,44(9):2148?2157.
[11] 王棟梁,劉英.Burg最大熵及其在切削顫振研究中的應(yīng)用[J].制造與機(jī)床,2017,5(19):103?106.
[12] 趙興崗,鄭岱堃,王守勇,等.一種基于AR模型的矩陣CFAR檢測(cè)器[J].電子學(xué)報(bào),2017,45(12):3019?3024.
[13] 嚴(yán)天峰,張宇,魏楠,等.基于小波降噪的稀疏傅里葉變換時(shí)延估計(jì)[J].測(cè)控技術(shù),2018,37(7):101?105.
[14] 李衡,趙毅強(qiáng),楊瑞霞,等.基于小波降噪數(shù)據(jù)預(yù)處理的硬件木馬檢測(cè)優(yōu)化[J].計(jì)算機(jī)工程與應(yīng)用,2017,53(1):49?53.
[15] 李遂意.基于雙波束雷達(dá)傳感器的車(chē)速檢測(cè)技術(shù)[D].南京:南京理工大學(xué),2013.

- 現(xiàn)代電子技術(shù)的其它文章
- 基于灰色關(guān)聯(lián)分析和神經(jīng)網(wǎng)絡(luò)的多媒體教學(xué)質(zhì)量評(píng)估
- 土地整理項(xiàng)目選址決策支持系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
- 基于Hadoop平臺(tái)的大學(xué)多媒體教學(xué)管理研究
- 基于扁平化指揮的智能實(shí)驗(yàn)室安全監(jiān)控系統(tǒng)設(shè)計(jì)
- 基于風(fēng)速融合和NARX神經(jīng)網(wǎng)絡(luò)的短期風(fēng)電功率預(yù)測(cè)
- Matlab/Simulink代碼生成技術(shù)在RTDS上的應(yīng)用