面向航空信息網(wǎng)絡(luò)的控制器可靠性部署方法
2020-06-18 03:41:52高航航趙尚弘
計算機工程 2020年6期
高航航,王 翔,趙尚弘,彭 聰
(空軍工程大學 信息與導航學院,西安 710077)
0 概述
航空信息網(wǎng)絡(luò)又稱為機載網(wǎng)絡(luò)、空基網(wǎng)絡(luò),主要通過高空航空平臺進行信息發(fā)送、節(jié)點接收或轉(zhuǎn)發(fā),是以節(jié)點間的無線通信為傳輸鏈路所組成的網(wǎng)絡(luò),其具有高動態(tài)、覆蓋范圍廣、作戰(zhàn)任務(wù)多樣化、接入數(shù)據(jù)量大等特點[1-2]。隨著網(wǎng)絡(luò)規(guī)模的擴大和作戰(zhàn)環(huán)境的復雜化,當前的航空信息網(wǎng)絡(luò)也逐漸暴露出一系列問題[3],例如:如何對航空平臺所獲得的戰(zhàn)場信息進行高效共享以及靈活調(diào)度控制;不同的作戰(zhàn)需求在網(wǎng)絡(luò)時延、可靠性方面具有不同QoS需求,要求網(wǎng)絡(luò)應具備較強的差異化服務(wù)能力;軟件控制和硬件轉(zhuǎn)發(fā)緊密耦合的傳統(tǒng)網(wǎng)絡(luò)設(shè)備難以滿足網(wǎng)絡(luò)快速發(fā)展的需要。面向未來的航空信息網(wǎng)絡(luò)應當具備提供靈活耦合任務(wù)的差異化網(wǎng)絡(luò)服務(wù)、支持靈活高效的網(wǎng)絡(luò)配置、新網(wǎng)絡(luò)技術(shù)能夠簡單快速部署等能力,而現(xiàn)有的無線信息網(wǎng)絡(luò)僅能滿足有限任務(wù)背景下模式固定的信息交互需求,難以支撐未來作戰(zhàn)中航空集群成員間的靈活協(xié)同。
軟件定義網(wǎng)絡(luò)[4](Software Defined Network,SDN)的出現(xiàn)為解決上述問題提供了新思路,其通過將傳統(tǒng)網(wǎng)絡(luò)設(shè)備中的控制平面和數(shù)據(jù)平面相解耦,利用邏輯集中控制的SDN控制器對底層轉(zhuǎn)發(fā)設(shè)備進行統(tǒng)一管控,控制平面負責策略制定與資源調(diào)配,底層轉(zhuǎn)發(fā)設(shè)備進行數(shù)據(jù)業(yè)務(wù)的轉(zhuǎn)發(fā),有效提高了網(wǎng)絡(luò)的信息處理和管理控制能力。然而集中式的控制平面存在單點失效、可靠性低、處理能力受限等缺點,實際中需要重點考慮控制平面的可擴展性,采用物理上分布、邏輯上集中的多控制器部署架構(gòu)已成為目前解決控制平面可擴展性的重要方法。
當前對于SDN多控制器的部署研究主要以地面網(wǎng)絡(luò)為主,評估指標包括網(wǎng)絡(luò)時延、可靠性、流量開銷等[5]。文獻[6]針對SDN中控制器部署問題進行研究,首先定義平均傳輸時延和最大傳輸時延,在此基礎(chǔ)上利用實際網(wǎng)絡(luò)拓撲進行分析,得到控制器數(shù)量對網(wǎng)絡(luò)時延的影響以及最優(yōu)時延和平均時延的比較結(jié)果,但文中僅考慮了網(wǎng)絡(luò)傳輸時延。文獻[7]在傳輸時延基礎(chǔ)上增加發(fā)送時延以完善現(xiàn)有的時延模型,并對該模型是否存在最優(yōu)解進行證明,針對是否發(fā)送時延分別提出傳輸算法和輸送算法。文獻[8]針對傳統(tǒng)靜態(tài)部署方案難以應對高動態(tài)網(wǎng)絡(luò)拓撲和流量變化這一問題,采用一種基于雙門限的交換機動態(tài)遷移策略以解決控制器失效和資源浪費問題,結(jié)果表明該算法在提升系統(tǒng)吞吐量的同時可保證控制器間的負載均衡。文獻[9]以航空網(wǎng)絡(luò)的全網(wǎng)中斷概率最小為目標,提出一種融合人工免疫策略、小生境思想以及改進遺傳算法的混合優(yōu)化算法,仿真表明該算法在獲得更優(yōu)值的同時其收斂時間也得到一定減少,但該文未考慮控制器的負載均衡問題。文獻[10]針對控制路徑平均故障率提出有效控制路徑預期百分比這一指標,通過最大化預期百分比實現(xiàn)網(wǎng)絡(luò)控制路徑的強健壯性,但平均故障率僅能反映網(wǎng)絡(luò)整體故障,無法反映網(wǎng)絡(luò)的最壞狀態(tài)。
航空信息網(wǎng)絡(luò)具有高動態(tài)網(wǎng)絡(luò)拓撲、遠距離傳輸范圍、大尺度節(jié)點分布以及不穩(wěn)定的鏈路質(zhì)量,因此,傳統(tǒng)基于地面網(wǎng)絡(luò)的多控制器架構(gòu)、部署算法等不再適用。本文在總結(jié)航空信息網(wǎng)絡(luò)特點的基礎(chǔ)上,對傳統(tǒng)平面式和層次式SDN多控制器架構(gòu)進行改進,設(shè)計一種混合式多控制器部署架構(gòu)。針對多控制器負載不均衡問題,提出改進的集群域劃分算法,并以網(wǎng)絡(luò)節(jié)點和鏈路中斷概率為變量,將網(wǎng)絡(luò)控制路徑故障率最小作為優(yōu)化目標,設(shè)計改進的離散粒子群優(yōu)化算法實現(xiàn)多控制器部署。
1 模型分析
1.1 軟件定義航空信息網(wǎng)絡(luò)架構(gòu)特點
航空信息網(wǎng)絡(luò)位于天基網(wǎng)絡(luò)和地面網(wǎng)絡(luò)之間,如圖1所示,其對上可與天基平臺建立信息鏈路,實現(xiàn)天基信息及時注入航空信息網(wǎng)絡(luò),為航空平臺提供信息支持,對下可與地面信息系統(tǒng)建立信息鏈路以保證地面指控信息的輸入,實現(xiàn)綜合信息處理分發(fā)、空中指揮控制和協(xié)同傳輸。目前航空信息網(wǎng)絡(luò)正朝著網(wǎng)絡(luò)異構(gòu)化、業(yè)務(wù)多樣化、功能復雜化的方向發(fā)展,加之網(wǎng)絡(luò)節(jié)點的移動性、鏈路的不穩(wěn)定性,其對當前的網(wǎng)絡(luò)性能提出更高的要求。現(xiàn)有的無線信息網(wǎng)絡(luò)雖然在傳輸可靠性、端到端時延、傳輸速率等網(wǎng)絡(luò)傳輸性能指標上能夠支撐現(xiàn)有的航空網(wǎng)絡(luò)進行一定程度的作戰(zhàn)協(xié)同,但其本質(zhì)上并非契合未來航空集群作戰(zhàn)的應用背景,網(wǎng)絡(luò)僅能滿足有限任務(wù)背景下模式固定的信息交互需求,與作戰(zhàn)任務(wù)缺乏靈活的耦合關(guān)系,而構(gòu)建一個基于SDN的航空信息網(wǎng)絡(luò)將更符合未來作戰(zhàn)對網(wǎng)絡(luò)各方面性能的要求。
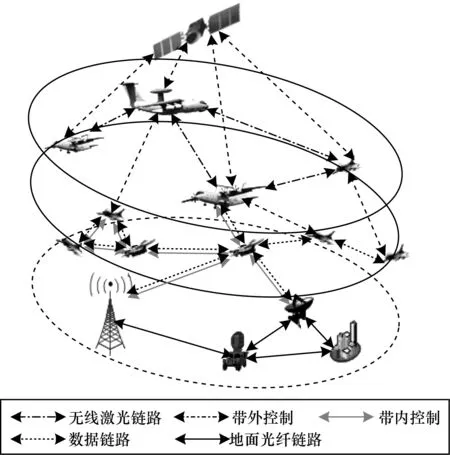
圖1 航空信息網(wǎng)絡(luò)示意圖
軟件定義航空信息網(wǎng)絡(luò)[3,11]利用SDN邏輯集中控制的網(wǎng)絡(luò)管控策略,能夠?qū)崟r掌握航空信息網(wǎng)絡(luò)全局視圖,實現(xiàn)對航空信息網(wǎng)絡(luò)中業(yè)務(wù)流量的優(yōu)化調(diào)度,滿足網(wǎng)絡(luò)中多用戶需求,改善整體性能。控制器部署作為構(gòu)建控制平面的前提,對提升網(wǎng)絡(luò)性能具有重要意義,而控制平面中單控制器通常存在單點失效、處理能力受限等問題,因此,多控制器部署架構(gòu)已經(jīng)成為目前有效的解決方案。多控制器部署架構(gòu)包括平面式架構(gòu)[12]、垂直式架構(gòu)[13]和混合式架構(gòu)[14]。由于高空節(jié)點的移動性和鏈路的不可靠性易造成網(wǎng)絡(luò)通信中斷,在瞬息萬變的戰(zhàn)場中控制器節(jié)點也存在一定的故障風險,因此地面網(wǎng)絡(luò)中的平面式多控制器架構(gòu)將不再適用。考慮到上述因素,航空信息網(wǎng)絡(luò)應采用混合式的控制器架構(gòu)對網(wǎng)絡(luò)進行集中管控,本文借鑒文獻[15]所構(gòu)建的混合式控制器架構(gòu)模型,結(jié)合具體的應用場景設(shè)計一種航空信息網(wǎng)絡(luò)下的混合式多控制器架構(gòu),如圖2所示。
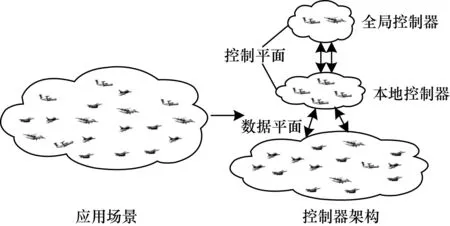
圖2 混合式多控制器架構(gòu)示意圖
混合式多控制器架構(gòu)中的控制平面由全局控制器(Global Controller,GC)和本地控制器(Local Controller,LC)組成,其中:GC可從全域戰(zhàn)場視角對航空信息網(wǎng)絡(luò)實施集中管控,應部署在信息綜合處理能力和生存能力較強的飛機節(jié)點上,如指通機、預警機等,其控制優(yōu)先級最高;LC負責管控其自身控制區(qū)域內(nèi)的網(wǎng)絡(luò)節(jié)點,考慮到航空信息網(wǎng)絡(luò)的實際需求及特點,可在每個航空平臺上布置LC,實際中網(wǎng)絡(luò)根據(jù)自身狀態(tài)及GC的部署策略開啟或關(guān)閉相應的LC,實現(xiàn)對其動態(tài)部署。
1.2 數(shù)學建模
軟件定義航空信息網(wǎng)絡(luò)中的多控制器部署問題描述如下:
1)G(V,E,Vc,Ec)表示航空信息網(wǎng)絡(luò)拓撲,其中,V代表網(wǎng)絡(luò)中飛機節(jié)點集合,E代表飛機節(jié)點間的通信鏈路集合,Vc代表網(wǎng)絡(luò)中部署的控制節(jié)點集合,Ec代表控制路徑集合,且Vc?V,Ec?E。
2)本文假定已知混合式多控制器架構(gòu)下GC的部署個數(shù)和位置,僅對控制平面中的LC進行部署,下文所提的控制節(jié)點與LC節(jié)點均為同一概念。
3)考慮到實際情況,網(wǎng)絡(luò)中所有飛機節(jié)點均應布置控制器,控制器按照具體部署策略相應打開或關(guān)閉。當飛機節(jié)點i上的控制器打開時,節(jié)點i為控制節(jié)點;當控制器關(guān)閉時,節(jié)點i為交換節(jié)點,也稱作普通傳輸節(jié)點,網(wǎng)絡(luò)中任意節(jié)點均有機會成為控制節(jié)點或交換節(jié)點。
4)控制路徑包括LC與GC節(jié)點之間的路徑以及交換節(jié)點與LC節(jié)點間相連的路徑。由于GC的優(yōu)先級最高,因此GC之間單獨配置控制路徑,實現(xiàn)對網(wǎng)絡(luò)視圖信息的共享。其余控制路徑為帶內(nèi)方式,不單獨配置控制路徑,即控制信息和數(shù)據(jù)信息通過相同的路徑進行傳輸。
5)假定網(wǎng)絡(luò)中節(jié)點和鏈路發(fā)生故障的概率均是獨立的,po和pv分別表示鏈路中斷概率和節(jié)點失效概率,有0≤po<1,0≤pv<1。
6)網(wǎng)絡(luò)中每個LC在同一時間內(nèi)只能由唯一的GC控制,每個交換節(jié)點也只能由唯一的LC控制。
為方便描述多控制器部署問題,現(xiàn)對具體數(shù)學模型中的符號進行說明,如表1所示。
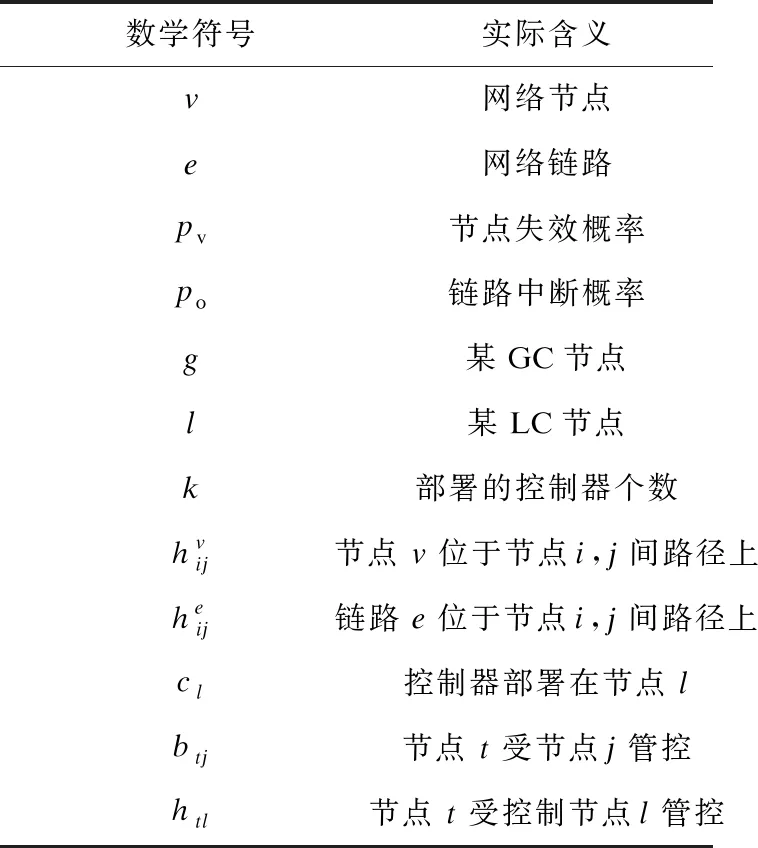
表1 符號說明
根據(jù)上述分析,可將軟件定義航空信息網(wǎng)絡(luò)中的多控制器部署問題建立如下目標函數(shù):
minf=f1+f2
(1)
(2)
(3)
s.t.pv,po∈[0,1);?v∈V,e∈E
(4)
btjcl=htl;l∈Vc,t,j∈V
(5)
(6)
(7)
l∈Vc,e∈E,g∈{GC}
(8)
式(1)表示最小化控制路徑故障率;式(2)表示LC節(jié)點和交換節(jié)點間的控制路徑故障率;式(3)表示LC節(jié)點與GC節(jié)點間的控制路徑故障率;式(4)表示節(jié)點、鏈路失效概率取值范圍;式(5)表示節(jié)點t受控制節(jié)點l所管控;式(6)表示網(wǎng)絡(luò)中部署的控制器個數(shù);式(7)表示一個交換節(jié)點只能由一個LC節(jié)點管控;式(8)表示各式中變量的取值范圍。
2 算法設(shè)計
2.1 航空集群域劃分算法
在航空信息網(wǎng)絡(luò)中存在著功能各異的飛機節(jié)點,本文參考文獻[15],假定在執(zhí)行某作戰(zhàn)任務(wù)過程中其網(wǎng)絡(luò)拓撲保持相對穩(wěn)定,隨著作戰(zhàn)任務(wù)變化,網(wǎng)絡(luò)拓撲也相應改變,本文在此基礎(chǔ)上對航空信息網(wǎng)絡(luò)進行進一步集群域劃分。
2.1.1 k-means聚類算法
k-means是一種簡單高效、快速實現(xiàn)的基于劃分原理的聚類算法,其將數(shù)據(jù)集U={x1,x2,…,xn}按照某種準則劃分為若干個子集,其中k為聚類數(shù)目,且聚類滿足以下約束:
Uj≠?,j=1,2,…,k
(9)
Ui∩Uj=?,i,j=1,2,…,kandi≠j
(10)
圖3所示為傳統(tǒng)k-means算法流程,其中輸入為數(shù)據(jù)集U和聚類個數(shù)k(見式(11)),輸出為聚類劃分結(jié)果,算法結(jié)束的條件為聚類中心不再發(fā)生變化或變化范圍在規(guī)定的閾值內(nèi)。
(11)
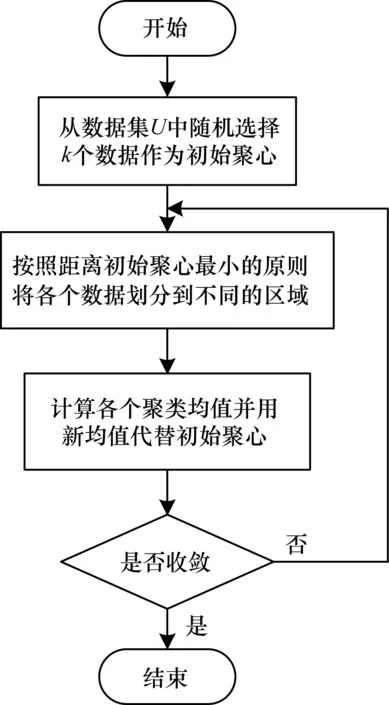
圖3 傳統(tǒng)k-means算法流程
由于k-means算法是隨機選擇初始聚類中心的,聚類結(jié)果會隨初始聚心的改變而改變,因此本文引入聚類質(zhì)量評估函數(shù)作為聚類效果的評價準則,其中對聚類質(zhì)量評估函數(shù)定義如下:
(12)
(13)
式(12)表示各聚類的內(nèi)距離和,J值越小則代表聚類的效果越優(yōu);式(13)表示集群域j的聚心。
2.1.2 改進k-means聚類算法
傳統(tǒng)k-means聚類算法是一種貪婪算法,容易陷入局部最優(yōu),并且該算法選擇的初始聚心極有可能偏離數(shù)據(jù)密集區(qū),若初始聚心位于孤點或者偏遠點,則會導致劃分的集群域性能變差。針對該問題,本文參考文獻[16-17]中提出的離群因子對k-means算法初始聚心位置隨機這一不足加以改進,設(shè)計一種基于離散因子(Discrete Factor,DF)的改進k-means算法,通過計算各節(jié)點的離散因子值,并選擇合適的離散因子值所對應的節(jié)點作為集群域初始中心,避免網(wǎng)絡(luò)中的孤點或離散點成為初始聚心,最終得到的集群域也將更加合理。算法描述具體如下:
定義1數(shù)據(jù)x的第k距離
x的第k距離dk(x)指在數(shù)據(jù)集合U中存在數(shù)據(jù)o,數(shù)據(jù)o與數(shù)據(jù)x之間的距離記為d(o,x),當滿足下述條件時,x的第k距離dk(x)等于d(o,x):
1)數(shù)據(jù)集U中至少存在k個數(shù)據(jù)o′∈D{x}滿足d(x,o′)≤d(x,o) 。
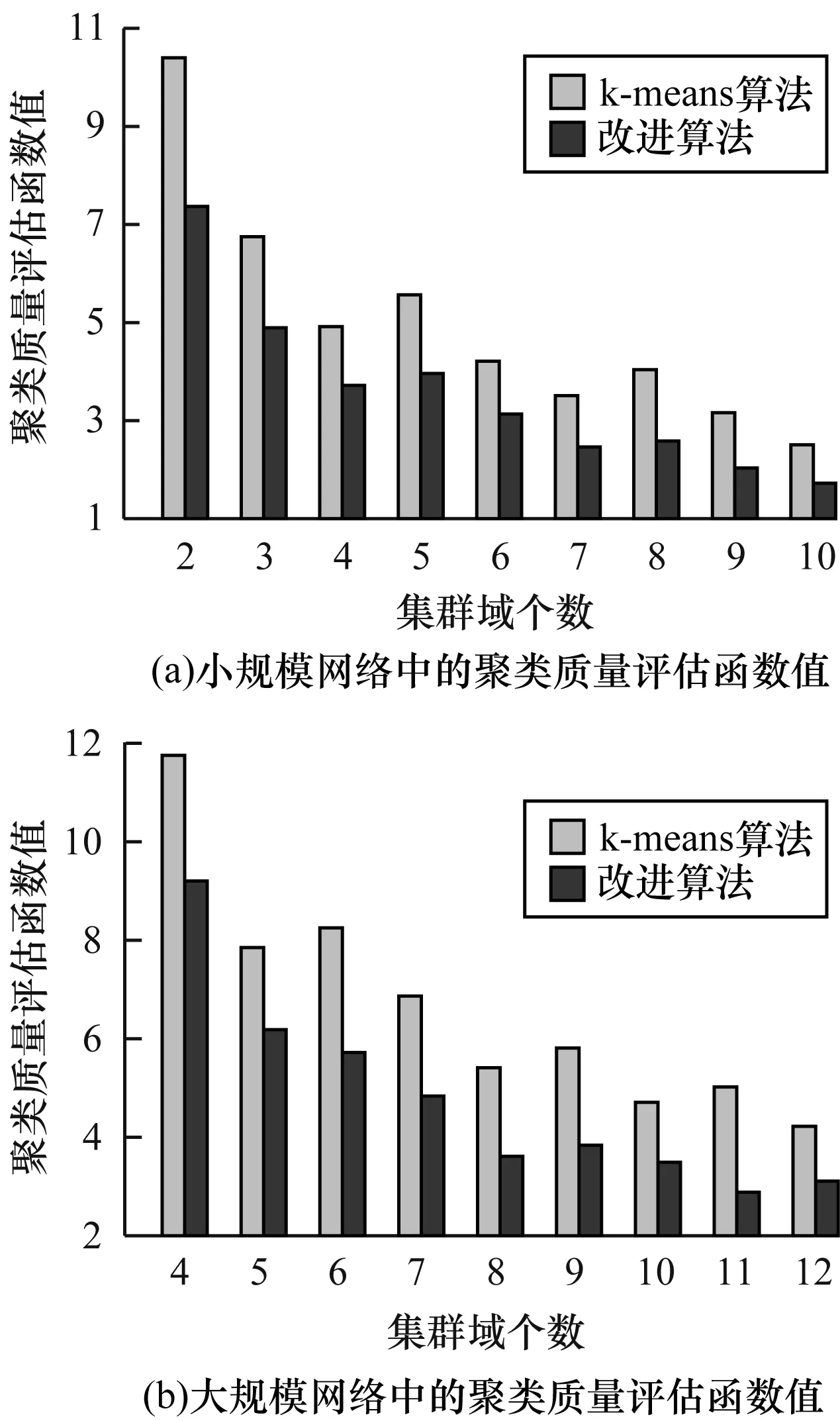
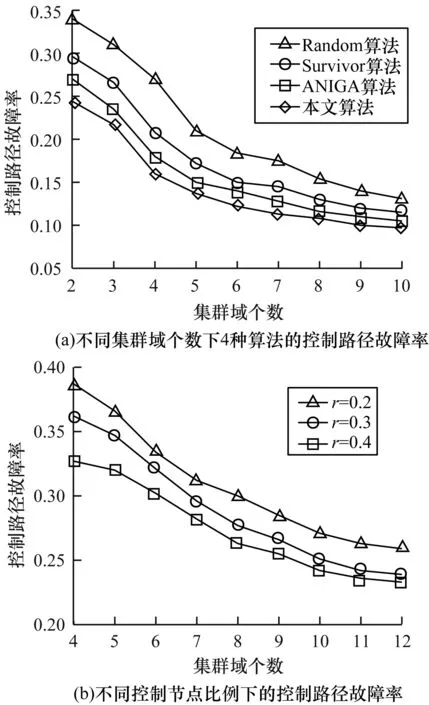
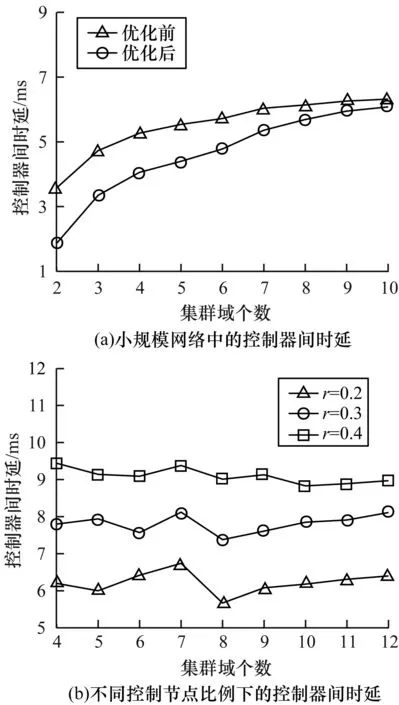
2)數(shù)據(jù)集U中至多存在k-1個數(shù)據(jù)o′∈D{x}滿足d(x,o′) 定義2數(shù)據(jù)x的第k距離鄰域 數(shù)據(jù)x的第k距離鄰域指不超過數(shù)據(jù)x的第k距離內(nèi)所有數(shù)據(jù)的集合,其表達式如式(14)所示,可以看出,若該集合較大,則說明數(shù)據(jù)x的第k距離鄰域較大,表明數(shù)據(jù)偏離程度較大,反之偏離程度較小。 Nk(x)={o∈D{x}|d(x,o)≤dk(x)} (14) 定義3數(shù)據(jù)x的離散因子 數(shù)據(jù)x的離散因子Dk(x)指在(x)的第k距離范圍內(nèi),集合U中數(shù)據(jù)的平均分布密度大小,Dk(x)值越大,則x越可能成為離群點,其計算公式如下: (15) (16) 本文利用歐式距離計算出數(shù)據(jù)x的第k距離大小,并根據(jù)式(14)得到數(shù)據(jù)x的第k距離鄰域,最后在x的鄰域內(nèi)計算出其余節(jié)點相對x的平均分布狀況,依次對集合U內(nèi)數(shù)據(jù)進行計算,得到集合U內(nèi)所有節(jié)點的平均分布密度大小。本文基于離散因子的改進k-means算法描述如下,其通過計算集合U中各數(shù)據(jù)的離散因子值,找出離散因子值較小的節(jié)點作為候選初始聚心集合,在該集合中通過計算距離進而得出最終的聚心位置。 算法1改進的k-means算法 輸入數(shù)據(jù)集U,聚類個數(shù)k,取樣系數(shù)α 輸出聚類結(jié)果Uj(j=1,2,…,k) 1.for each xi∈U 2.計算xi的DF值,并將計算結(jié)果按照升序排列到ListDF中 3.選擇ListDF中前n×α個數(shù)據(jù),生成候選初始聚心集合CandidateClusterSet 4.令C=?,在CandidateClusterSet中選擇DF值最小的數(shù)據(jù)xi作為初始聚心C1,C={C1},并從CandidateClusterSet中刪除該數(shù)據(jù),Update CandidateClusterSet 5.for each xi∈CandidateClusterSet 6.計算數(shù)據(jù)xi與C1之間的歐氏距離,選擇距離最大的數(shù)據(jù)點作為第2個初始聚心C2,C={C1,C2},并從Candidate ClusterSet中刪除該數(shù)據(jù),Update CandidateClusterSet 7.for each xi∈CandidateClusterSet 8.分別計算xi與{C1,C2}之間的距離,將計算結(jié)果相加,選擇最大值所對應的數(shù)據(jù)作為下一個初始聚心C3,C={C1,C2,C3},并從CandidateClusterSet中刪除該數(shù)據(jù),Update CandidateClusterSet 模糊PID控制器采用單片機編程設(shè)計,由于MSP430單片機內(nèi)部沒有專用的浮點數(shù)處理器,因此在數(shù)據(jù)的處理過程中,浮點數(shù)的計算是通過特定的算法程序來實現(xiàn),如果采用浮點數(shù)計算來進行數(shù)據(jù)處理,將消耗大量的CPU資源,同時數(shù)據(jù)的處理周期較長,影響其單片機的實時控制,因此在數(shù)據(jù)處理時應盡量少用實型數(shù)據(jù)計算處理。在實際設(shè)計中將浮點數(shù)的小數(shù)部分放大,在滿足精度要求的基礎(chǔ)上,盡可能采用整形數(shù)據(jù)來處理數(shù)據(jù)計算,也可以采用長整形來實現(xiàn)數(shù)據(jù)的處理(見圖4)。 9.Repeat and Update C 10.until i>k 11.輸出k個初始聚心結(jié)果uj( j=1,2,…,k) 12.從得到k個初始聚心出發(fā),利用最短路徑算法求出聚類結(jié)果 根據(jù)算法1可得到最終的聚心分布結(jié)果,相比于傳統(tǒng)k-means算法,該算法有效地避免了聚心位于孤點或偏遠點,使得聚心分布更加合理。算法在構(gòu)造集群域時主要考慮節(jié)點的分布特點,而在實際部署過程中由于LC存在處理能力受限等問題,易造成某LC負載過載或欠載,從而引起數(shù)據(jù)擁塞或不能充分利用資源等問題,本文在此基礎(chǔ)上加入LC負載受限這一約束條件對集群域劃分結(jié)果進行優(yōu)化調(diào)整。通過引入負載均衡指數(shù)B對各集群域間的負載是否均衡進行計算判斷,其表達式如下: (17) (18) 其中,a(xi)表示節(jié)點xi向其集群域內(nèi)的LC提交的數(shù)據(jù)請求信息,且集群域內(nèi)所包含節(jié)點提交的總數(shù)據(jù)請求信息不能超過該集群域內(nèi)LC的負載能力。LC負載約束的集群域劃分算法描述如下: 算法2LC負載約束的集群域劃分算法 輸入初始聚心結(jié)果uj,負載均衡指數(shù)B 輸出LC負載約束的聚類劃分結(jié)果Uj 1.利用改進k-means算法求出初始聚心。 2.按照最短距離算法將xi分配給各uj,形成集群域Uj。 3.計算各集群域內(nèi)LC負載以及負載均衡指數(shù)B,并判斷B是否符合預先設(shè)置值,若符合,則轉(zhuǎn)到步驟5,否則執(zhí)行步驟4。 4.將LC過載對應的集群域內(nèi)節(jié)點分配至距離次短的集群域內(nèi),并轉(zhuǎn)到步驟3。 5.得到LC負載約束的集群域劃分結(jié)果。 將航空信息網(wǎng)絡(luò)劃分為多個集群域后,在集群域中以控制路徑總故障率最小為目標進行LC部署,其目標函數(shù)如式(1)~ 式(8)所示,本文采用一種改進的離散粒子群算法BPSO對目標函數(shù)進行求解。 2.2.1 離散粒子群算法 離散粒子群優(yōu)化算法是一種基于群體智能理論的優(yōu)化算法,其用空間中的粒子表示問題的解,并根據(jù)適應度函數(shù)判斷粒子的好壞,粒子依據(jù)個體最優(yōu)和全局最優(yōu)進行位置更新,具有收斂速度快、易實現(xiàn)等特點[18-20]。BPSO算法中的粒子Xi由d維二進制編碼組成,將粒子Xi=(xi1,xi2,…,xid)的每一維限制為0或1,其速度Vi=(vi1,vi2,…,vid)不加限制,每個位根據(jù)式(19)改變速度,改變后的速度轉(zhuǎn)換為位變量取1的概率,通常利用式(20)中的sigmoid函數(shù)計算該概率值,在算法搜索過程中,粒子Xi通過自身和種群狀態(tài)對其位置動態(tài)調(diào)整,其每一維的速度和位置計算公式如下: (19) (20) (21) 2.2.2 改進的離散粒子群優(yōu)化算法 由上述分析可知,BPSO算法中的sigmoid函數(shù)僅能求解出粒子位取1或者取0的概率,無法求出粒子位的變化值大小。在實際生活中,人們在解決問題時通常會依賴以往的個人歷史經(jīng)驗和社會歷史經(jīng)驗[22]。 結(jié)合上述分析,本文提出一種改進的離散粒子群算法進行求解。 (22) (23) (24) (25) 在尋找最優(yōu)解的過程中,粒子的好壞程度用適應度函數(shù)來評價,本文用式(1)作為改進BPSO算法的適應度函數(shù),即F=f,若某粒子的適應度函數(shù)值小,則代表該粒子所對應的解更優(yōu),否則較差,集群域內(nèi)的LC部署算法描述如下: 算法3改進BPSO算法的控制器部署算法 輸入各集群域Uj 輸出控制器部署方案 1.設(shè)置粒子種群規(guī)模N,迭代次數(shù)Tmax,控制器數(shù)目k。 2.初始化粒子位置Xi,速度Vi,個體最優(yōu)pid并計算全局最優(yōu)pgd。 3.計算當前時刻粒子的適應度值F。 4.比較當前時刻粒子的適應度值F與個體最優(yōu)下的適應度值和全局最優(yōu)下的適應度值大小,判斷是否更新個體最優(yōu)和全局最優(yōu)。 5.更新粒子速度Vi并根據(jù)表2更新粒子位置Xi。 6.是否達到迭代次數(shù)上限T,若未達到,則執(zhí)行步驟3。 7.判斷控制器數(shù)目i 8.得到不同的控制器個數(shù)k以及不同的LC部署方案。 上述LC部署算法根據(jù)式(19)對粒子速度進行更新,在對粒子位置更新時采用如下策略: 1.產(chǎn)生隨機數(shù)r = rand() if r < α then xi= 1 else xi=0 if r < 1- α then xi=1 else xi=0 if r < β then xi= 1 else xi=0 5.else if r < 1- β then xi= 1 else xi=0 本文設(shè)置航空信息網(wǎng)絡(luò)的范圍為600 km×600 km,為體現(xiàn)出網(wǎng)絡(luò)的動態(tài)性,在該范圍內(nèi)分別隨機生成2種大小規(guī)模不同的網(wǎng)絡(luò)拓撲,小規(guī)模網(wǎng)絡(luò)包括36個節(jié)點和84條鏈路,大規(guī)模網(wǎng)絡(luò)包括72個節(jié)點和176條鏈路。假定只有一個GC,且GC的位置隨機指定,并忽略GC的數(shù)量和位置對網(wǎng)絡(luò)性能和部署結(jié)果造成的影響。在部署LC過程中,假定所有LC的處理能力和負載容量均相同,所有傳輸節(jié)點向LC傳輸?shù)恼埱笮畔⒘恳蚕嗤?節(jié)點和鏈路發(fā)生故障的概率分別為[0,0.03]和[0,0.05]內(nèi)的隨機數(shù)。此外,為體現(xiàn)2種不同規(guī)模網(wǎng)絡(luò)中部署LC的差異性,在小規(guī)模中的每個集群域內(nèi)僅部署一個控制器,而在大規(guī)模網(wǎng)絡(luò)中每個集群域內(nèi)部署若干個控制器。 在仿真中同時設(shè)置Random算法、ANIGA算法[9]和Survivor[23]算法進行性能對比。Random算法在網(wǎng)絡(luò)中隨機選擇節(jié)點部署LC;ANIGA是一種基于啟發(fā)式的隨機搜索算法,其通過循環(huán)迭代找出滿足中斷概率條件時的LC數(shù)量和位置。Survivor算法通過選擇不相交路徑最多的節(jié)點部署LC,并按最短距離為其分配交換機節(jié)點。此外,為排除干擾因素,仿真中將實驗重復20次,并計算結(jié)果的平均值作為最終結(jié)果輸出。 圖4(a)和圖4(b)分別為傳統(tǒng)k-means算法和改進算法在2種不同網(wǎng)絡(luò)中的聚類質(zhì)量評估函數(shù)值,可以看出,改進算法的J值波動范圍與k-means算法相比較小,且整體J值均低于k-means算法,這是由于在改進算法中加入了負載均衡模塊,劃分的每個集群域中節(jié)點個數(shù)差異較小,進而計算出的J值波動范圍較小。此外,由于改進算法在選擇初始聚心時充分考慮到網(wǎng)絡(luò)中各節(jié)點的離散系數(shù),有效地避免了孤點或離散點成為初始聚心,進而計算出的J值更小,說明了采用改進算法劃分的集群域更合理。 圖4 聚類質(zhì)量評估函數(shù)值 圖5(a)顯示了在小規(guī)模網(wǎng)絡(luò)中控制路徑故障率隨集群域個數(shù)變化的情況,可以看出,隨著集群域個數(shù)的增加,4種算法下的控制路徑故障率均逐漸降低,如集群域個數(shù)為2、6、10時對應的控制路徑故障率分別為0.246、0.124、0.093,這是由于隨著集群域個數(shù)的增加,小規(guī)模網(wǎng)絡(luò)中的控制器數(shù)量隨之增加,控制節(jié)點與交換節(jié)點間的控制路徑增多,進而控制路徑的可靠性增大。 圖5(b)顯示了在大規(guī)模網(wǎng)絡(luò)中控制節(jié)點所占比例對網(wǎng)絡(luò)控制路徑故障率的影響,可以看出,在各集群域中控制節(jié)點比例逐漸增加的同時,控制路徑故障率相應地減小,如集群域個數(shù)為4時,當控制節(jié)點比例為0.2、0.3和0.4時所對應的控制路徑故障率分別為0.386、0.363、0.327,可見在集群域中通過增加控制器的個數(shù)能夠有效地降低網(wǎng)絡(luò)控制路徑故障率。 圖5 控制路徑故障率 圖6(a)顯示了小規(guī)模網(wǎng)絡(luò)下控制器間的數(shù)據(jù)同步時延,可以看出,隨著集群域個數(shù)的增多,控制器間同步時延呈現(xiàn)上升的趨勢,如優(yōu)化前和優(yōu)化后同步時延分別增加了2.741 ms和4.212 ms,這是由于隨著集群域數(shù)量的增加,網(wǎng)絡(luò)中的控制器個數(shù)隨之增加,控制器節(jié)點間的控制路徑增加,進而造成網(wǎng)絡(luò)中的同步時延增大。此外,隨著集群域個數(shù)的增多,集群域中節(jié)點數(shù)量減少,控制器部署位置的差異度也隨之減小,從而優(yōu)化前后控制器間同步時延的差距也逐漸縮小。 圖6(b)顯示了大規(guī)模網(wǎng)絡(luò)下不同控制器數(shù)量對控制器間時延的影響,可以看出,隨著集群域個數(shù)的增加,圖中曲線的變化趨勢較為緩慢,這是由于當集群域個數(shù)較少時,各集群域內(nèi)的節(jié)點數(shù)量較多,其集群域內(nèi)的控制節(jié)點也相對較多,而當集群域個數(shù)增多時,集群域內(nèi)的節(jié)點數(shù)量減少,在同等控制節(jié)點數(shù)量比例下其集群域內(nèi)的控制節(jié)點也相應減少。因此,盡管集群域個數(shù)在逐漸增多,但其控制器總數(shù)量與集群域個數(shù)較少時網(wǎng)絡(luò)中的控制器總數(shù)量相差不大,意味著在網(wǎng)絡(luò)中不能一味地追求集群域的數(shù)量,如圖中集群域個數(shù)k=8時網(wǎng)絡(luò)中的控制器間同步時延最小,在該集群域數(shù)量下可獲得較小的時延開銷。此外,在相同的集群域個數(shù)下,隨著網(wǎng)絡(luò)中控制節(jié)點比例的增加,控制路徑數(shù)量也隨之增加,進而使得控制器間同步時延開銷增大,如當控制節(jié)點比例從0.2增加到0.4時,其控制器間平均時延值分別增加了1.608 ms和2.896 ms。 圖6 控制器間時延 本文針對軟件定義航空信息網(wǎng)絡(luò)架構(gòu)中的控制平面可擴展性問題展開研究,將航空信息網(wǎng)絡(luò)劃分為多個集群域。在劃分集群域時,為避免集群域中心位于孤點或偏遠點,提出一種基于離散因子的改進k-means算法,結(jié)果表明該算法得到的聚心分布更合理。在集群域內(nèi)LC部署方面,以控制路徑故障率最小為優(yōu)化目標設(shè)計改進的BPSO算法。仿真結(jié)果驗證了本文在解決控制器部署問題方面的有效性。本文重點考慮控制器無故障下的部署方案,下一步將針對控制器的可生存性進行研究,以確保控制器工作的可連續(xù)性。2.2 集群域內(nèi)的控制器部署算法


3 仿真結(jié)果分析
3.1 仿真設(shè)置
3.2 結(jié)果對比與分析
4 結(jié)束語