艦炮含鉗爪回轉機構的伸爪運動特性研究
2020-06-18 03:28:38彭京徽王德石張弘弨
兵工學報 2020年5期
彭京徽, 王德石, 張弘弨
(1.海軍工程大學 兵器工程學院, 湖北 武漢 430033;2.海軍研究院, 北京 100161)
0 引言
為滿足空間和運轉要求,回轉運送機構普遍應用于貨物運輸機械。大口徑艦炮轉彈機是一種含鉗爪回轉運送機構,相比于其他貨物運輸機械,具有承受強沖擊、高轉速和變負載的特點[1],研究回轉運輸機構的運動特性對降低系統故障率,提高供彈機構動作可靠性有著重要意義。國內外學者對間歇式回轉運輸機構的研究不多[2-4],主要集中在重型回轉機構[5-8]。對含鉗爪回轉機構伸爪運動而言,其運動與機械手類似,應滿足良好的定位要求,文獻[9]給出了計算二自由度機械手動力學的一般方法。張大鑫[10]主要從整體結構、動作方案設計和各關節之間的傳動關系等方面對多自由度取放機械手的結構設計和運動進行了分析。陳功等[11]利用解析法對6桿組合機構的機械臂進行速度及加速度分析,并優化結構設計。申團輝等[12]利用多體動力學仿真軟件ADAMS和數學仿真軟件MATLAB/Simulink聯合仿真研究一種基于曲柄滑塊機構原理設計的簡易農用移栽機機械手夾持機構。機器人動力學方程非常復雜,相關的研究方法有拉格朗日方程、牛頓- 歐拉方程[13]、凱恩方程、廣義達朗貝爾原理[14]等。其中,牛頓- 歐拉方程和拉格朗日方程是兩種較為高效的求解機器人動力學模型方法。對于牛頓- 歐拉方程,在機器人關節速度、角速度已知時,運用牛頓- 歐拉公式求解出各個關節驅動力矩的遞推公式,再根據遞推公式求解出機器人動力學數學模型。拉格朗日方程是整體系統能量對系統變量及時間的微分而建立的。對于簡單系統,使用拉格朗日方程比較繁瑣,但是,系統較為復雜時,使用拉格朗日方程求解的效率就會體現出來[15]。上述文獻對機械手臂的運動研究主要還是控制與路徑規劃,鮮有研究機械手手指的運動特性。
因此,本文首先以含鉗爪回轉運送機構為對象得到機構運動的簡化桿件模型,根據伸爪運動過程中的構型變化、多坐標系的轉換關系和封閉矢量法進行了機構伸爪的運動學分析;然后,進行機構伸爪受力分析、利用達朗貝爾原理和拉格朗日方程建立了機構伸爪的動力學方程;最后,基于機構的幾何參數與驅動參數,通過MATLAB軟件進行了算例分析。
1 機構模型與運動分析
含鉗爪的回轉運送機構主要由轉軸、輪盤、鉗爪以及其他輔件等組成,其中鉗爪主要包括鉤爪、驅動桿、偏心銷等部件,具體結構如圖1所示。
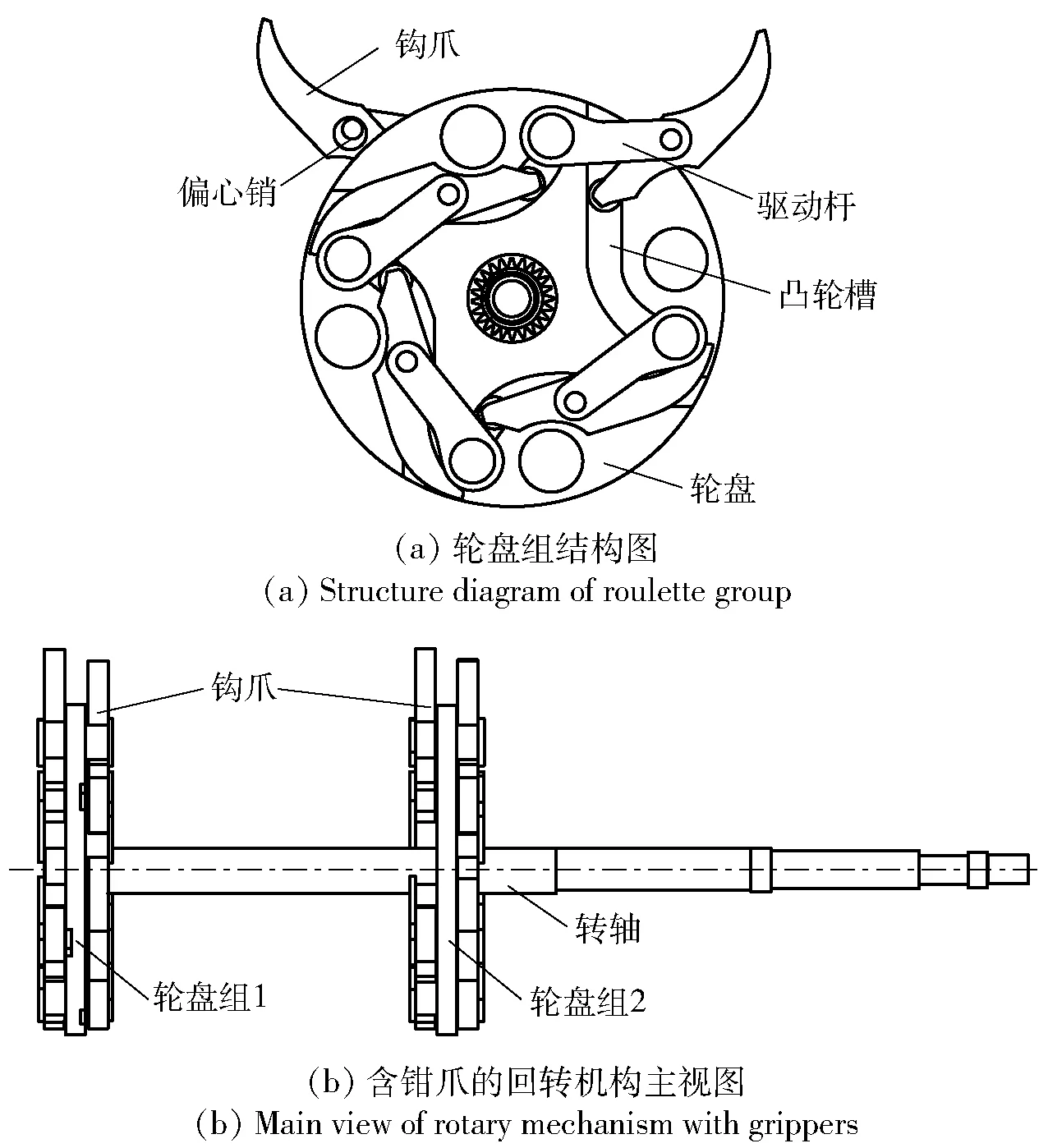
圖1 間歇式鉗爪回轉運送機構Fig.1 Intermittent rotary mechanism with claws
其工作機理是:由兩組雙鉤爪同時進行伸爪,轉軸轉動作為外部驅動轉矩M0促使輪盤轉動,轉盤上的驅動桿、鉤爪等組件隨輪盤一起轉動;而驅動桿同時受到外部驅動轉矩M1和M2驅動,帶動鉤爪運動,但鉤爪下部凸輪受到輪盤上凸輪槽的約束,凸輪沿凸輪槽方向運動,從而逐步進行由規定路徑的伸爪運動,直至輪盤轉動90°,鉤爪在轉彈起始位置完成伸爪動作,鉤爪夾緊物體。每組雙爪的兩個爪在伸爪運動時的位置存在對應關系,因此在實際研究時可以先研究一個爪伸爪時的運動特性問題。同時,伸爪運動過程受到兩個外部轉矩驅動,包括轉軸驅動輪盤轉動和輔件促使驅動桿帶動鉤爪運動,進而完成伸爪動作。在運動模型簡化中將偏心銷視為間隙,先忽略間隙對理論運動軌跡帶來的影響,得到的單鉤爪和雙鉤爪運動簡化模型分別如圖2(a)、圖2(b)所示。
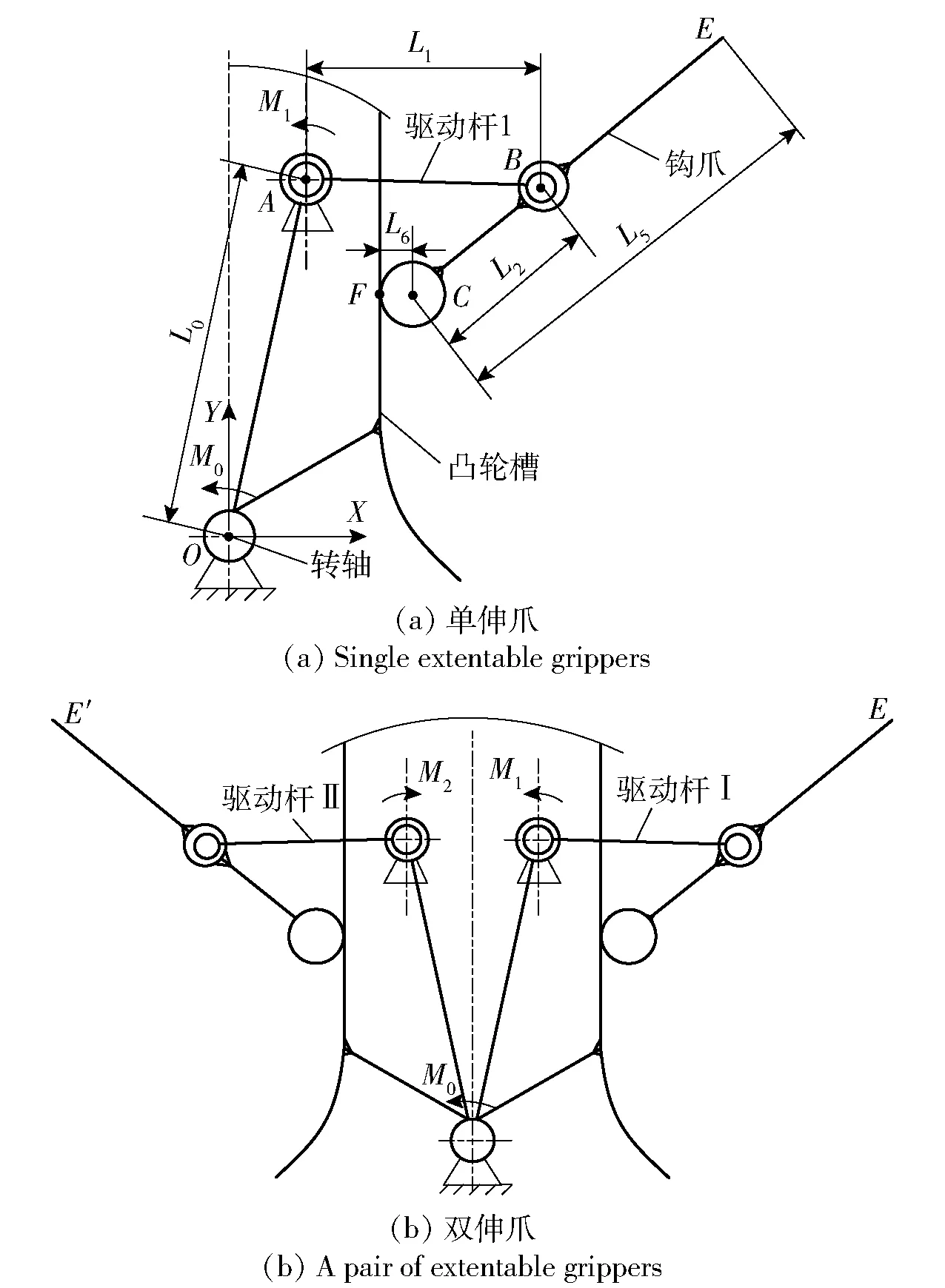
圖2 運動簡化桿件模型Fig.2 Simplified model of lever motion
圖2中:O、A、B、C、E、F分別是轉軸中心、驅動桿轉動副中心、驅動桿連接孔中心、凸輪中心、鉤爪末端位置、凸輪與凸輪槽接觸點;L0、L1、L2、L5、L6分別是轉軸中心到驅動桿轉動副中心的距離OA、驅動桿長度AB、鉤爪連接副中心到凸輪中心的距離BC、凸輪中心到鉤爪爪尖的距離CE、凸輪半徑CF;M0、M1、M2分別是轉軸、驅動桿Ⅰ和驅動桿Ⅱ的驅動轉矩。
2 機構伸爪過程的運動特性
2.1 伸爪過程的運動約束分析
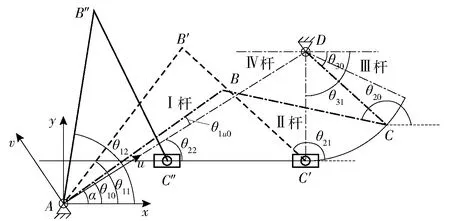
圖3 伸爪運動等效圖Fig.3 Equivalent figure of extentable gripper motion
由圖2可將伸爪過程等效為圖3所示以A點為原點的局部坐標系下運動過程的3個狀態。圖3中起始狀態的AB、BC、CD和DA分別對應Ⅰ桿、Ⅱ桿、Ⅲ桿和Ⅳ桿,分別建立Axy坐標系和Auv坐標系。由圖3可將伸爪過程分為兩個階段,分別對應的時間和構型等參量如表1所示,其中Ⅰ桿、Ⅱ桿、Ⅲ桿和Ⅳ桿分別對應長度為L1、L2、L3、L4.
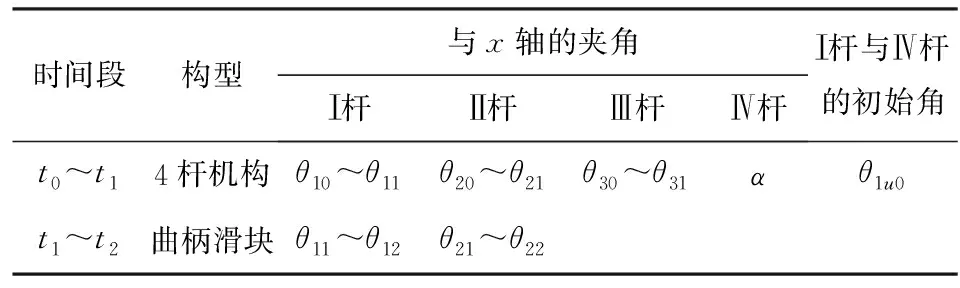
表1 不同時間段對應的參量
在t0~t1時間段,由封閉矢量法可建立Auv坐標系下4桿機構運動方程,A、B、C、D對應坐標分別是(uA,vA)、(uB,vB)、(uC,vC)和(uD,vD),Ⅰ桿、Ⅱ桿、Ⅲ桿和Ⅳ桿與u軸對應夾角分別記為θ1u、θ2u、θ3u和θ4u,其中uA=0 mm,vA=0 mm,θ4u=0°.
(1)
因此,鉤爪末端點E的坐標(uE,vE)為
由表1可知x軸與u軸的夾角α,則任一點Mi(i=1,2,…)在兩個坐標系中的坐標分別為(xMi,yMi)、(uMi,vMi),且用向量q、δ分別表示Axy和Auv坐標,θi和θiu分別為Mi在Axy和Auv坐標系對應的角度,對應幾何關系的矩陣形式為

因此,得Axy和Auv坐標的轉換矩陣關系式為
基于上述Axy坐標系與Auv坐標系的轉換,在t1~t2時間段,建立Axy坐標系下曲柄滑塊機構的運動方程:
(2)
式中:SC為AC的x軸方向的距離;R為y軸方向的距離。解得
在以轉軸O原點建立的全坐標系OXY下:(XA,YA)=(L0cosβ,L0sinβ),(xM,yM)=(-yM,xM),(XM,YM)=(xM,yM)+(XA,YA),β是OA桿與X軸的初始夾角,用向量η表示全坐標系下的坐標,B表示轉換矩陣。輪盤轉角γ=ω0t(ω0為輪盤角速度),根據轉換公式可求得全坐標系下各點對應的坐標:
2.2 伸爪過程的動力學特性

圖4 兩種構型機構的受力分析Fig.4 Force analysis of two configurations of rotary mechanism
機構在t0~t1時間段,構型為4桿機構;在t1~t2時間段,構型為曲柄滑塊機構。兩構型分別如圖4(a)、圖4(b)所示。圖4中CD為無質量構件桿Ⅲ,滑塊為無質量構件,S0、S1、S2分別表示輪盤組、桿Ⅰ和鉤爪的質心,LS1、LS2分別表示A點到S1的距離和C點到S2的距離,OA機構質量集中在A點,LS0是轉盤偏心距離,考慮到機構過于復雜且輪盤組質量遠大于鉤爪質量,假設O點到輪盤組S0的LS0距離保持不變。
拉格朗日方程:
(3)
(4)
δW0=F0δq0+F1δq1,
(5)
(6)
δW0=δW1,
式中:H為系統總動能,
(7)
令
式中:J11、J22、J12均具有轉動慣量的量綱,稱為2自由度系統的等效轉動慣量;G0是輪盤的重力;G1是驅動桿的重力;G2是鉤爪的重力;ηSnX和ηSnY分別表示坐標系OXY中Sn點的坐標;LSn是質心Sn到相應點的距離;qSnX和qSnY分別表示坐標系Axy中Sn點的坐標。
由此可計算出質心S1、S2矩陣形式的運動軌跡方程,整理可得伸爪運動的微分方程:
3 算例分析與仿真研究
利用MATLAB軟件數值計算和ADAMS軟件虛擬樣機仿真對伸爪過程的運動特性進行分析,分別取m0=3 kg、m1=0.05 kg、m2=0.10 kg、L0=0.133 69 m、L1=0.095 2 m、L2=0.063 91 m、L3=0.062 m、L4=0.144 07 m、L5=0.191 7 m、R=0.042 6 m、ω0=π/6 rad/s、ω1=5π/54 rad/s、α=40.05π/180 rad、β=76.5π/180 rad、θ10=33.16π/180 rad、θ1u0=13.34π/180 rad進行算例分析。
3.1 運動曲線分析
由上述數據經MATLAB軟件數值計算和ADAMS軟件樣機仿真計算可得E(XE,YE)的運動坐標、E點到全局坐標原點O的距離LOE變化以及OE轉角變化,分別如圖5(a)、圖5(b)和圖5(c)所示,其中仿真1是不考慮偏心銷時的仿真結果,仿真2是計及偏心銷對仿真影響的結果曲線。

圖5 E點的位置變化Fig.5 Motion of Point E’s position
由圖5得到的計算和仿真曲線可知,在伸爪過程中E點坐標、OE距離LOE及其轉角的變化趨勢基本保持一致。其中,OE距離LOE持續增大,E點的運動規律在構型變化處發生改變,LOE增長變緩直至伸爪運動結束。計算和仿真1的E點坐標分別為(-193.2 mm,229.6 mm)和(-193.0 mm,229.6 mm),定位偏差為(-0.2 mm,0 mm);計算和仿真1的LOE長度范圍分別是188.4~300 mm和189~300 mm,變化裕度分別為111.6 mm和111 mm,平均偏差為0.3 mm;計算和仿真1的LOE轉角范圍分別為69.093 1°~130.080 5°和69.445 8°~130.048 9°,變化裕度分別為60.987 4°和60.603 1°,平均偏差轉角0.192 15°. 仿真2得到的運動結束時刻E點坐標為(-187.7 mm,232.9 mm),與計算值和仿真1的定位偏差分別為(-5.5 mm,3.3 mm)和(-5.3 mm,3.3 mm);仿真2的LOE長度范圍分別是189~299.1 mm,變化裕度為110.1 mm,相對于計算值和仿真1的變化裕度偏差分別為-1.5 mm和-0.9 mm;仿真2的LOE轉角范圍分別是69.564 0°~128.760 5°,變化裕度為59.196 5°,相對平均偏差轉角分別為1.790 9°和1.406 6°. 由計算和仿真對比分析可知,二者仍存在一定誤差,但誤差較小;在考慮偏心銷時得到的仿真曲線2與計算曲線以及仿真曲線1的對比可知,E點的運動軌跡存在波動現象。
3.2 動力學特性曲線
由ADAMS軟件樣機仿真可得到圖6所示的有無偏心銷時鉤爪質心S2在全局坐標系的轉角加速度變化曲線,并對有偏心銷時轉角加速度曲線進行了擬合。
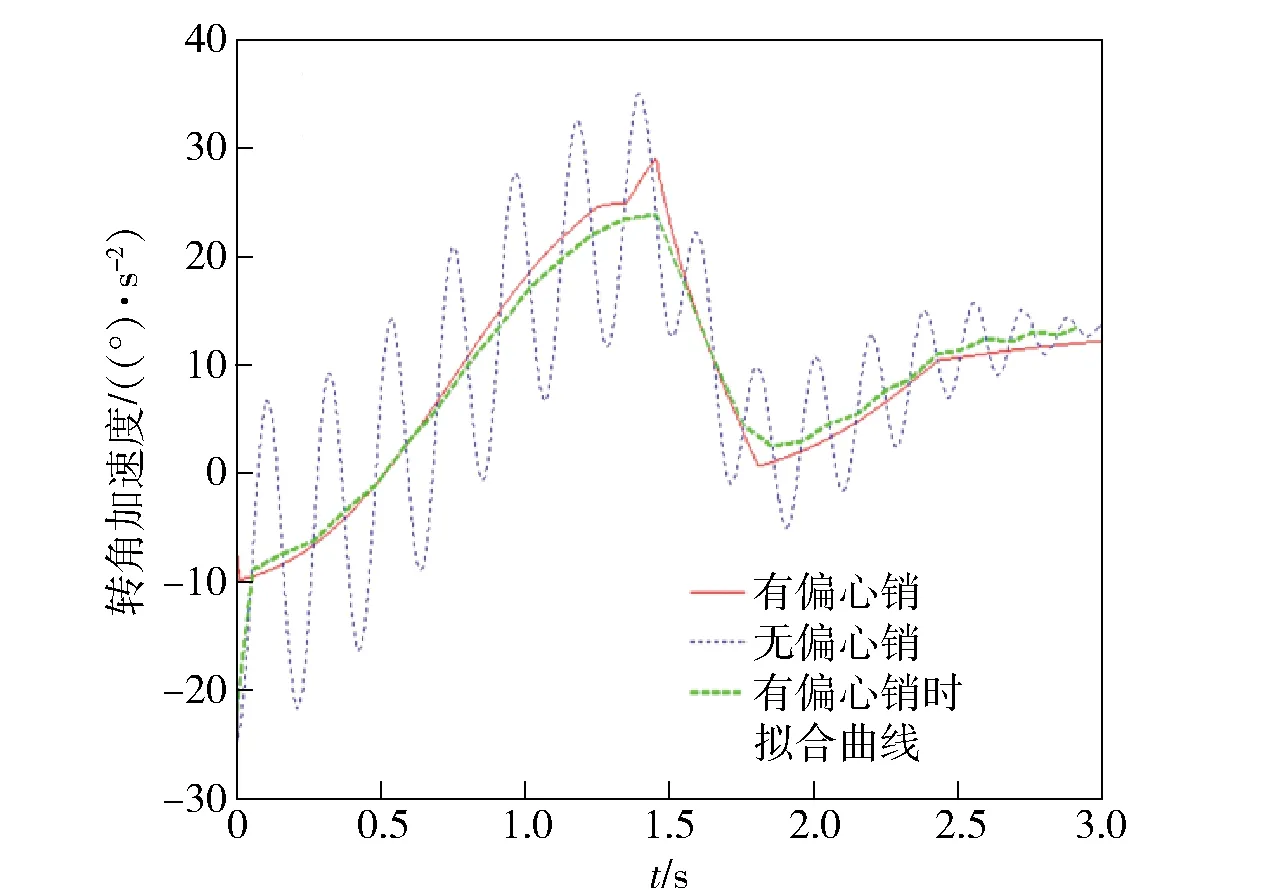
圖6 質心轉角加速度曲線Fig.6 Curves of center of mass’s angular acceleration
由圖6可知:無偏心銷機構的鉤爪質心S2點在全坐標系的轉角加速度存在正負值變化,并在構型變化處有階躍現象;在考慮偏心銷時,加速度曲線存在波動現象,并對波動曲線進行了擬合,得到擬合曲線,擬合線的變化趨勢與無偏心銷時的加速度仿真曲線在變化趨勢上基本一致,但也有一定程度的差別,尤其是在構型變化位置的加速度變化,偏心銷的存在能有效降低加速度的突變。
4 結論
本文通過簡化模型、建立系統方程和算例分析,進行了間歇式含鉗爪回轉機構伸爪運動的計算和仿真研究。得出以下主要結論:
1)機構在完成伸爪運動過程中存在構型的變化情況,第1個階段是正4桿機構向反4桿機構的運動,第2個階段是曲柄滑塊機構。
2)伸爪過程中LOE的理論轉角變化為60.987 4°,仿真結果分別為60.603 1°和59.196 5°,仿真與理論計算仍存在一定誤差,但誤差較小,誤差原因主要來源于機構配合和尺寸等參數測量上的誤差;E點的轉角加速度在構型變化處發生突變,LOE持續增大直至伸爪運動結束。
3)分析偏心銷對運動的影響由仿真可知,偏心銷的存在會導致E點運動軌跡波動,但對鉤爪定位誤差影響較小;此外,偏心銷能在減小加速度突變的同時會引起加速度振蕩。
