石墨烯改性尼龍導電織物及其應變傳感性能
2020-06-16 03:52:46李澤釗韓瑋屹王潮霞
印染助劑 2020年5期
李澤釗,原 韻,韓瑋屹,馮 宏,吳 怡,王 博,王潮霞
(江南大學紡織科學與工程學院,生態紡織教育部重點實驗室,江蘇無錫 214122)
柔性應變傳感器由于輕薄、靈敏度高和可植入等優點被廣泛應用在生物、化學、電子、醫學檢測、人體監測等多個領域。一般柔性傳感器的導電材料為金屬納米材料和碳基材料。金屬納米材料拉伸性能差而且成本較高,相比較碳基材料的靈敏度較高[1]、拉伸性好,其中石墨烯的導電性和傳感性突出,是制備柔性可穿戴應變傳感器的理想材料[2]。將石墨烯附著到織物纖維上,使織物具有透氣、服帖、全柔的特點,還具有優良的力學性能和導電性能[3-4],可作為紡織品用拉伸傳感器。這種以織物作為基底的石墨烯導電復合材料可實現眨眼、微笑、肌肉運動、吞咽和脈搏等人體行為的信號采集[5],具有非常好的傳感應用前景。
將織物充分吸附水溶性氧化石墨烯(GO),再通過原位還原得到的還原氧化石墨烯(RGO)緊密覆蓋于織物纖維表面,從而得到柔性導電材料,是制備石墨烯導電織物的常用方法[6-7]。該方法可以使石墨烯在聚合物中均勻分散[8],避免由于石墨烯片層表面沒有活性基團致使分散液容易團聚和沉降[9]以及轉移到織物上等不穩定問題。本研究采用化學還原法將吸附到可拉伸尼龍基材上的GO 還原成RGO,制得RGO-尼龍導電織物,探究導電性與拉伸應變之間的關系,以及在人體信號監測中的傳感性能。
1 實驗
1.1 材料與設備
材料:尼龍織物(尼龍70%、氨綸30%),GO 水性漿料(自制),連二亞硫酸鈉(保險粉,分析純,國藥集團化學試劑有限公司)。
設備:T18 digital 均質機(德國IKA 公司),inVia拉曼光譜測試儀(英國雷尼紹公司),FE-SEM 場發射掃描電鏡(ZEISS SIGMA),SZT-2A 四探針表面電阻測試儀(蘇州同創電子有限公司),CHI760E 電化學工作站[上海辰華(CHI)儀器有限公司],SHJ-A 水浴恒溫磁力攪拌器(金壇市金南儀器制造有限公司),XS105電子精密天平(METTLER TOLEDO)。
1.2 RGO-尼龍織物的制備
稱取GO 漿料20 g,與去離子水以質量比1∶10 配制200 mL 溶液,將尼龍織物浸漬其中1 h,使充分吸收GO,隨后轉移至5 g/L 保險粉溶液中,并在90 ℃恒溫水浴中充分還原,烘干后重復上述實驗6 次。剪取5.0 cm×0.9 cm RGO-尼龍織物做導電和傳感性能測試。
1.3 測試
利用場發射掃描電鏡進行表面形貌觀察,并且采用拉曼光譜探究結構特征。
導電性能:每進行一次浸漬-還原后都采用數顯萬用表測量電阻,測6 次,取平均值,計算出標準差表征RGO 在織物上分散的均勻程度。在RGO-尼龍織物拉伸應變100%的過程中,每增加20%應變,就用同樣方法測量電阻值。將織物拉伸50%并重復10 000次,每隔1 000 次用數顯萬用表和四探針電阻測試儀分別測量6 次電阻和方阻,取平均值,并計算標準差來表征導電性能。
傳感性能:將RGO-尼龍織物分別貼附于食指第二關節和手腕背側,測試者對應做出食指下彎和手腕下彎兩種動作,每個動作重復4 次,利用電化學工作站測出RGO-尼龍織物在不同部位動作拉伸時的電流變化曲線。
2 結果與討論
2.1 表征
由圖1a 可知,尼龍織物纖維表面較光滑平整。由圖1b 可知,經6 次浸漬-還原后的尼龍織物纖維表面幾乎全被包裹上有褶皺、突出狀結構的片層物質,說明尼龍織物浸漬在GO 溶液中,帶正電荷的尼龍纖維與帶負電的GO 相互作用[10],使GO 吸附到纖維上,再經還原過程,GO 中的含氧基團被去除,形成RGO 大面積地負載在纖維表面;但纖維表面有少量的突出部分,這可能是由RGO 團聚造成。
為了進一步驗證尼龍織物纖維表面的負載物質為RGO,采用拉曼光譜儀進行檢測。從圖2可知,與尼龍織物相比,RGO-尼龍織物具有兩個明顯的特征峰:在1 355 cm-1處RGO 中部分無序結構引起的晶體結構缺陷形成D 峰;在1 590 cm-1處碳原子平面sp2雜化成鍵所引起的面內振動形成G 峰[11]。兩峰強度比ID/IG=1.80,表明被還原的氧化石墨烯雖然去除了部分含氧基團,sp2雜化碳原子增多,但是仍存在一定量的sp3雜化碳原子,因此有一定的結構缺陷[12-14]。同時,尼龍基材的一些特征峰在RGO-尼龍織物的拉曼光譜圖上變弱甚至消失,這也說明RGO 確實負載到了尼龍纖維表面。
2.2 RGO-尼龍織物導電性能的影響因素
2.2.1 浸漬-還原次數
考慮到以導電性反映傳感性能的RGO-尼龍織物,難以經過一次浸漬-還原就具有較理想的導電性,故進行多次浸漬-還原,使RGO 盡可能多地與尼龍纖維結合,在織物表面形成穩定的導電層,賦予織物較優的導電性。如圖3 所示,尼龍織物經過前3 次浸漬-還原,其電阻大幅度減小,這是因為大量的RGO 結合到尼龍纖維表面,形成導電通道。每經過一次浸漬-還原,就會有更多的RGO 負載到纖維表面,RGO 間的相互接觸更加緊密,纖維表面的RGO 層也會增多,形成的導電通道體系不局限于二維平面,而是形成一種立體的導電網絡結構,宏觀上表現為在織物表面形成導電層[15]。在浸漬-還原從第4 次至第6 次的過程中,電阻減小的幅度越來越小,到最終鮮有降低。這是因為纖維上RGO 的負載量越來越多,幾乎將纖維完全覆蓋,在織物表面形成連續、多層并且穩定的導電層。電阻不再隨浸漬-還原次數的增加明顯降低,說明織物對RGO 的負載量已近似飽和,其導電性達到較好且穩定的狀態。
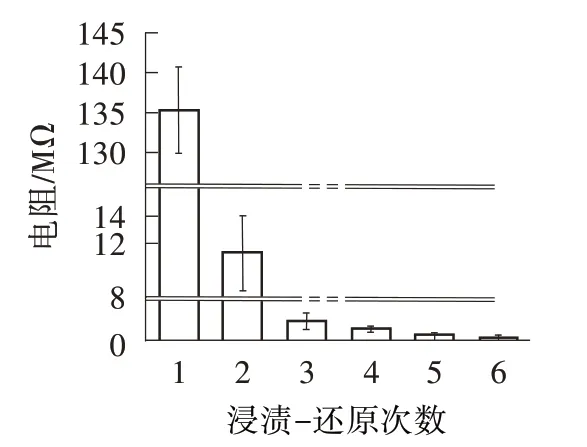
圖3 浸漬-還原次數對RGO-尼龍織物導電性能的影響
2.2.2 應變量
由于該織物纖維是尼龍與氨綸的混紡纖維,本身具有良好的拉伸彈性,有較大的應變量。通過拉伸RGO-尼龍織物使應變量從0%到100%,探究電阻隨應變量的變化關系,找到適合傳感性能測試的應變量區間,結果如圖4所示。
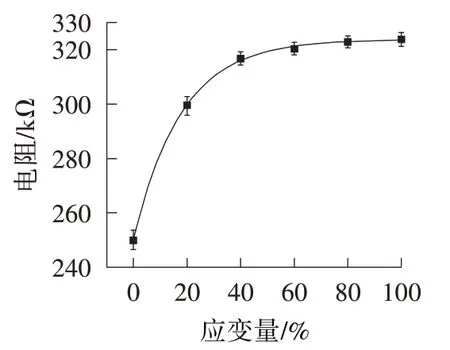
圖4 RGO-尼龍織物導電性隨拉伸應變量的變化
由圖4 可知,當RGO-尼龍織物被拉伸到應變量20%的過程中,電阻隨應變量增長近乎呈線性增長。這是因為在橫截面積和電阻率不變的情況下,材料的電阻與其長度成正比,在應變量為0%~20%時,織物上導電的RGO 層截面積縮小量極其有限,相較于其應變伸長量可忽略不計,所以電阻與應變量的變化幾乎呈線性關系。隨著織物繼續被拉伸到應變量60%,RGO 層內部可能出現部分斷裂,局部RGO 不再有效接觸,導電性能下降,致使電阻進一步增大。當應變量從60%增加到100%時,電阻的增長趨勢變得極小。這是因為雖然應變量持續增長,但RGO 內部主要的斷裂過程已基本結束,只是大部分已經斷開的RGO 間隙繼續變大,不會再引起電阻突變。總體來看,當應變量在0%~20%時,RGO-尼龍織物的導電體系比較穩定,電阻與應變量間有較穩定的變化關系,受到拉伸時能通過電阻變化展現其較好的傳感性能,所以當人體部位的運動在此應變范圍時,RGO-尼龍織物能夠起到很好的傳感檢測作用。
2.2.3 拉伸次數
用作傳感器的RGO-尼龍織物在投入使用時會受制于其耐用性。由圖5 可以看出,經過1 000 次拉伸,RGO-尼龍織物的電阻沒有明顯增長;電阻和方阻都隨拉伸次數的增加呈現總體小幅波動式的增大趨勢。說明拉伸1 000 次以下,RGO-尼龍織物的回彈性較好,織物表面負載的RGO 導電層比較穩定,導電性無太大變化,但經過上千次循環拉伸之后,RGO-尼龍織物變疲勞,不能完全回復原長,RGO 間的有效接觸減少,形成的導電網絡受到破壞,所以織物的導電性能會有所下降。此項測試證明:受制于尼龍織物本身的拉伸疲勞性,拉伸次數較少時,RGO-尼龍織物保持穩定的導電性能,但長時間的多次拉伸會使RGO-尼龍織物的電阻不可避免地增大,影響導電傳感性能。
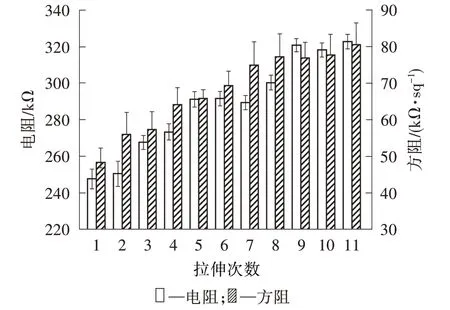
圖5 RGO-尼龍織物導電性與拉伸次數的關系
2.3 RGO-尼龍織物的傳感性能
RGO-尼龍織物受到拉伸可以體現出明顯的導電能力變化,作為傳感器貼附于皮膚上,可以通過電化學工作站實時檢測導電信號波形變化,有效監測人體部位的運動情況。考慮到手部活動較多,且關節的活動范圍適中,將手指和手腕關節作為檢測RGO-尼龍織物傳感性能的部位。預設恒壓為0.5 V,將RGO-尼龍織物接入電路,手指和手腕處的電流信號如圖6所示。
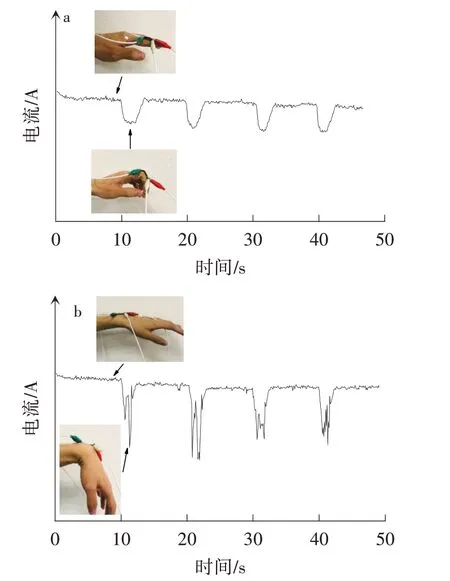
圖6 RGO-尼龍織物在手指(a)和手腕(b)處的電流信號變化
由圖6 可知,當手平放時,RGO-尼龍織物處于自然伸長狀態,通過的電流值比較穩定;當手指和手腕分別下彎時,RGO-尼龍織物受拉伸而產生應變,電阻增大,流經的電流值減小,出現了明顯的波形變化;當手指和手腕回復到原位時,RGO-尼龍織物也恢復到原長,電阻變小,電流波形又回到初始狀態附近。在相同的工作電壓下,兩組動作采集到的導電信號波形有明顯差異,并且在手腕處檢測到的電流變化大于手指處,說明當人體不同部位做出相類似的動作時,由于具體關節和肌肉的運動牽拉情況以及動作幅度存在差異,RGO-尼龍織物傳感器的應變程度不同,導電性變化也不同。
3 結論
(1)尼龍織物表面負載的RGO 隨浸漬-還原次數的增加而增多,織物整體電阻明顯減小,導電性顯著提升,在浸漬-還原6 次后,織物具有較好的導電性能。RGO-尼龍織物具有良好的拉伸彈性,織物的電阻隨著拉伸長度的增長而變大,而在經過上千次拉伸后,織物會因疲勞難以回復原長,致使導電性下降,因此耐用性不高成為制約RGO-尼龍織物傳感器難以長期穩定使用的一個因素。
(2)RGO-尼龍織物受人體不同部位運動幅度的影響,導電信號波形變化也有不同,能有效捕捉并識別人體部位的動作。作為一種智能可穿戴材料,RGO-尼龍織物在傳感方面有著較大的發展潛力,在與電子信息技術相融合后,可在醫學領域用于人體信號的實時監測。
