全旋轉內置式可控彎接頭運動特性
2020-06-16 05:22:24張光偉喬陽高嗣土田帆
石油鉆采工藝 2020年1期
張光偉 喬陽 高嗣土 田帆
西安石油大學機械工程學院
隨著油田勘探開發工作的不斷深入,勘探難度不斷增加,原有的鉆井方式已經無法滿足要求,旋轉導向鉆井技術得到了越來越廣泛的應用[1-3]。旋轉導向鉆井系統(Rotary Steerable Systems,簡稱RSS)是在鉆柱旋轉鉆進時,可以隨鉆實時完成導向的一種智能導向鉆井系統[4-5],旋轉導向鉆井通過控制導向力的大小和方向實現對井眼軌跡的控制。
可控彎接頭屬于全旋轉內置式導向鉆井工具,是旋轉導向鉆井系統的關鍵執行部件,在國內尚處于理論研究階段[6-9],一些學者對此做了卓有成效的工作[8-13]。導向鉆具可控彎接頭的模型是導向系統運動學研究的基礎,筆者通過對旋轉導向鉆井工具的運動學分析,建立了導向鉆具可控彎接頭的空間機構模型,并通過Solidworks對該模型進行了三維運動仿真研究,得出關鍵部件的運動學參數,以盡可能準確地研究內外偏心環和導向軸的轉速、偏心距與鉆頭運動的關系,深入揭示可控彎接頭的運動特性,為全旋轉內置式可控彎接頭的開發提供參考。
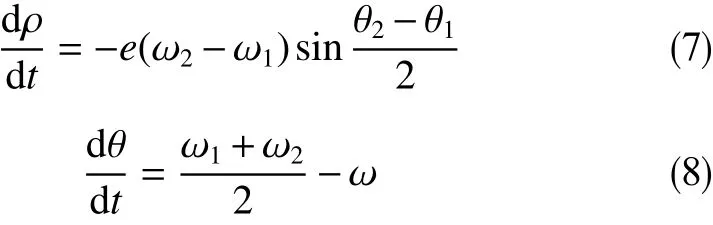
1 全旋轉內置式可控彎接頭結構
全旋轉內置式可控彎接頭主要由伺服電機、偏心環組、導向軸、導向節和旋轉外套等組成(圖1),偏心環組包括兩個相互配合的偏心環,是導向執行機構的主要部件[14-16],可控彎接頭的導向功能主要由內、外兩個偏心環的相對運動來實現。伺服電機分別用于驅動內偏心環、外偏心環,旋轉外套隨著鉆柱一起旋轉,旋轉外套聯結上部鉆柱與下部鉆頭,是上部鉆柱施加鉆壓與扭矩于鉆頭的重要橋梁,導向節是導向軸導向的支點,也是旋轉外套與導向軸之間扭矩傳遞的受力點[17]。

圖1全旋轉內置式可控彎接頭結構示意圖Fig.1 Schematic structure of full rotary built-in variable angle bent sub
2 空間機構模型
如圖1所示,導向軸插入到球座中兩者配合形成一個圓柱副(4級副),球座與內偏心環形成一個球面副(3級副),內偏心環通過法蘭Ⅱ與內偏心環伺服電機固連,使得內偏心環與外偏心環形成一個旋轉副(5級副),外偏心環通過法蘭Ⅰ與外偏心環伺服電機相連接使得外偏心環與旋轉外套之間也形成一個旋轉副(5級副),導向節與導向軸之間顯然可以看作是一個球銷副(4級副),綜上可將此可控彎接頭結構模型簡化成一個空間機構。
全旋轉內置式可控彎接頭具有5個構件,圖2中桿1是外偏心環,桿2是內偏心環,桿3是軸承,桿4是導向軸,桿5是底座。如圖2(a)所示,根據空間機構自由度計算公式[18]得

式中,F為空間機構自由度;n為活動構件數;p1~p5分別為1~5級運動副數量。

圖2鉆具機構運動Fig.2 Mechanism motion of drilling tool
該全旋轉內置式可控彎接頭可通過調節其傳動比、外偏心環轉速ω1、內偏心環轉速ω2,使得ω1=ω2,以實現偏心環作簡單的圓軌跡運動,這時桿1(外偏心環)和桿2(內偏心環)相對于機架5的角速度的方向、大小均相等,桿1與桿2在B點處剛性連接,可以去掉圖2(a)中的轉動副ω2,可進一步將其演化為圖2(b)所示的空間4桿機構,桿1是偏心環,桿2是軸承,桿3是導向軸,桿4是底座。該4桿機構的空間自由度為

需要指出的是,桿1(外偏心環)和桿2(內偏心環)雖然固連在一起但不一定共線,因此其初相位差的不同導致了夾角γ的差異性,但夾角γ一旦確定,此時該機構具有確定的運動,鉆頭可按預定的井眼軌跡鉆進。
3 運動特性分析
3.1 正向運動學分析
全旋轉內置式可控彎接頭通過內、外偏心環的相對位置改變,產生偏心矢量,改變鉆頭的空間姿態[19]。通過運動學特性分析得到運動學參數可為井眼軌跡的控制理論提供參考[20]。
如圖3建立空間坐標系,設導向節為A,鉆頭為P,環組的重心為O,AO1=l且AP=l1,偏心矢量O1O用ρ表示,與x軸夾角為θ,內偏心環的重心為O2,轉角為θ2,角速度為ω2,外偏心環的重心為O1,轉角為θ1,角速度為ω1,且兩者的偏心矢量大小均為e,旋轉外套的角速度為ω。
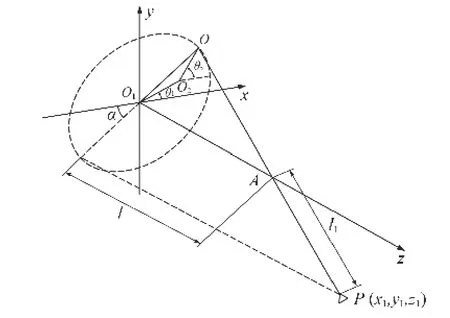
圖3全旋轉內置式可控彎接頭空間位置示意圖Fig.3 Schematic spatial position of full rotary built-in variable angle bent sub
O點的坐標為

轉化為極坐標

鉆頭的空間坐標P(x1,y1,z1)可表示為:

由于旋轉外套相對于地面坐標系會產生相對轉動ω,因此在大地坐標系下O點的坐標變為

關于時間t對式(6)求導,
首先在工具角不變的情況下,使得ρ的一階導數為0,θ的一階導數非0,此時改變工具面角的條件是ω1=ω2≠ω;其次在工具面角不變的情況下,使得ρ的一階導數非0,θ的一階導數為0,改變工具角的條件是(ω1+ω2)/2=ω且ω1≠ω2,則兩者都不變的條件為ω1=ω2=ω。取偏心距e=10 mm,l1=253 mm,l=310 mm,旋轉外套旋轉角速度ω=8π/3 rad/s。利用MATLAB得出鉆頭與偏心環在空間中仿真軌跡,如圖4所示。
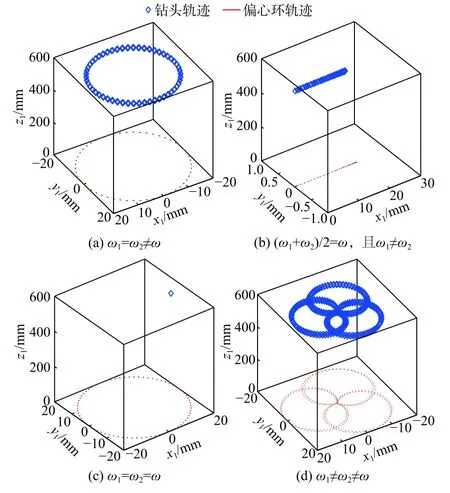
圖4不同條件下鉆頭與偏心環的軌跡曲線仿真Fig.4 Simulated trajectory curve of bit and eccentric ring under different conditions
由圖4鉆頭與偏心環的仿真曲線可知,當ω1=ω2≠ω時鉆頭和偏心環的軌跡是空間上的一個圓;當(ω1+ω2)/2=ω且ω1≠ω2時鉆頭和偏心環的軌跡都為空間上的一條直線;當ω1=ω2=ω時鉆頭的軌跡為空間中的一點,而偏心環的軌跡則為空間上的一個圓;當ω1≠ω2≠ω時鉆頭和偏心環的軌跡為空間上的螺旋線。
鉆頭的工具面角調節角速度如圖5所示,可以看出,隨著內偏心環和外偏心環角速度的不斷增加,鉆頭工具面角調節角速度也在不斷增加,且呈現線性相關關系。由d2ρ/d2t=0得到工具面角調節角加速度為0。
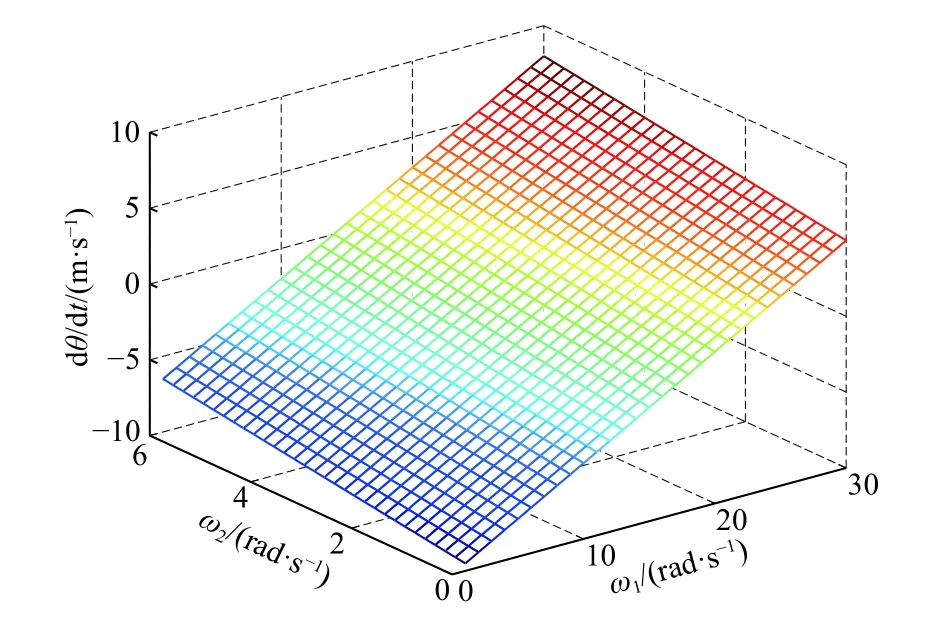
圖5工具面角調節角速度與內、外偏心環角速度的關系Fig.5 Relationship between the regulation angular velocity of tool face angle and the angular velocity of inner/outer eccentric ring
工具角調節加速度為

由式(7)和式(9)可得在時刻t=2 s時,工具角調節速度和加速度隨兩個驅動電機轉動角速度變化的曲線,如圖6。隨著兩個電機轉動角速度ω1和ω2的變化,工具角調節速度和調節加速度呈余弦規律不斷變化。
3.2 反向運動學分析
反向運動學分析,即已知鉆頭的空間坐標,求解兩個驅動電機的轉角θ1,θ2。當|O1O|=0時,則有無數個解,此時全旋轉內置式可控彎接頭垂直鉆進;當0<|O1O|<2e時,解的個數有2個,此時全旋轉內置式可控彎接頭導向鉆進;當|O1O|=2e時,有且僅有1個解,此時全旋轉內置式可控彎接頭最大造斜鉆進;當|O1O|>2e時,不存在。
假設空間中鉆頭坐標是P(x1,y1,z1),由式(5)中的x1,y1反推可求得環組重心O坐標為

由圖3可知

圖6工具角調節速度與加速度Fig.6 Regulation speed and acceleration of tool angle

則O點極坐標為

聯立式(10)和式(12)可得出內、外偏心環的轉角θ2和θ1
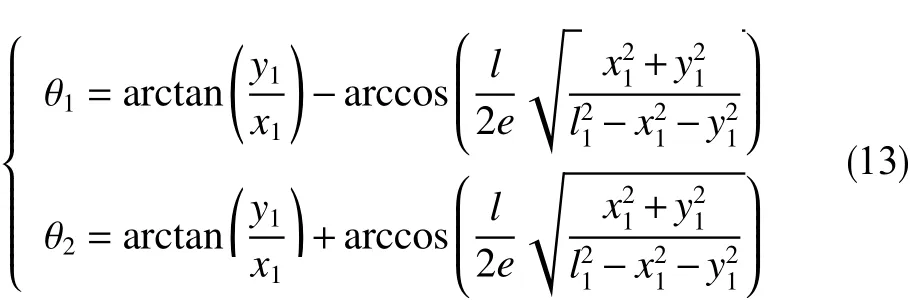
將e=10 mm,l1=253 mm,l=310 mm 代入,由式(13)中該函數的定義域可得

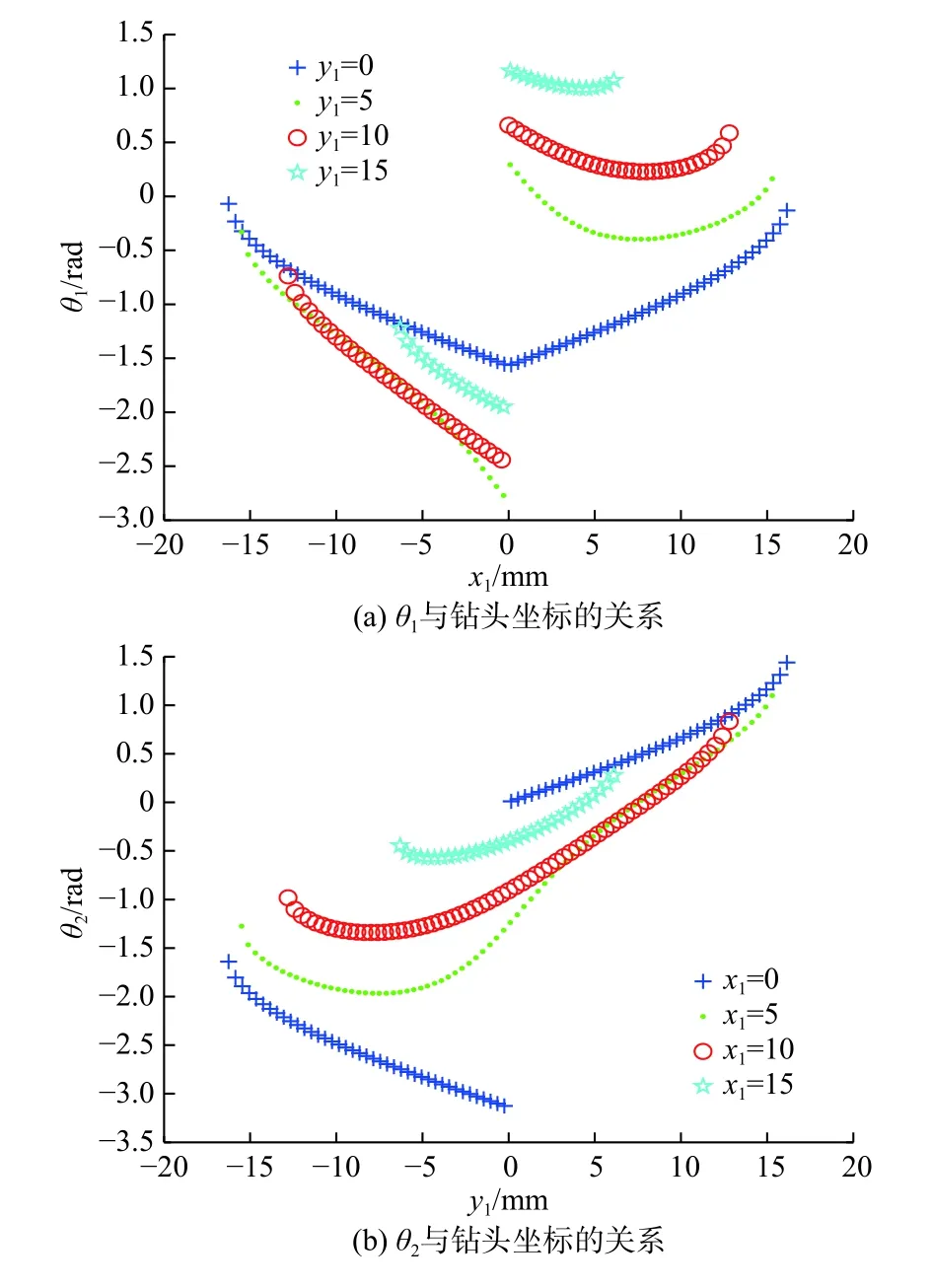
圖7內外偏心環伺服電機各自轉角與鉆頭坐標的關系Fig.7 Relationship between bit’s coordinate and the rotation angle of the servomotor with inner/outer eccentric ring
4 運動軌跡仿真
鉆井工具在導向模式的自由度為3,故需3個驅動力就可使機構具有確定運動。在SolidWorks Motion 環境下,建立機構的運動學模型和機構組成如圖8所示,其中全旋轉內置式可控彎接頭具有6個構件,1是外偏心環,2是內偏心環,3是軸承,4是導向軸,5是旋轉外套,6是底座。給運動學模型中構件1、2和4分別施加一個旋轉馬達,調節各個馬達的轉速[21],并且考慮到鉆井中,鉆頭存在鉆壓與扭矩且不穩定,各軸承存在阻力,因此在仿真過程中添加了阻尼,得到在不同轉速情況下鉆頭處以及偏心環組中心處的軌跡曲線。

圖8鉆井工具運動學模型和機構組成Fig.8 Kinematics model and mechanism component of drilling tool
由仿真分析結果可知,當內外偏心環角速度相等且不等于旋轉外套角速度時,鉆井工具處于工具角不變,調節工具面角的狀態,鉆頭和偏心環組中心的軌跡如圖9(a)所示,其中的大圓是偏心環組中心的運動軌跡,小圓是鉆頭的運動軌跡;當內外偏心環角速度均值等于旋轉外套角速度且內外偏心環角速度不等時,鉆井工具處于工具面角不變,調節工具角的狀態,鉆頭和偏心環組中心的軌跡如圖9(b)所示,左邊是偏心環組中心的軌跡,右邊的是鉆頭的軌跡,二者都近似為一條直線;當內外偏心環以及旋轉外套角速度均相等時,導向機構處于穩斜鉆進的狀態,此時工具角與工具面角都不再變化,鉆頭和偏心環組中心的軌跡如圖9(c)所示,左邊是偏心環組中心的軌跡近似為圓,右邊是鉆頭的軌跡近似為一點,仿真結果與MATLAB理論結果一致。在調節工具面角仿真過程中得到鉆頭的角位移、軸向位移和角速度如圖10所示,可以看出,鉆頭角位移、軸向位移和角速度曲線變化規律均為簡諧運動,周期均為6 s,初始相位均不為0 rad,平衡點分別為83.7°、163 mm和0(°)/s,幅值分別為0.7°、98 mm 和8.9(°)/s,角位移在83°~84.4°之間變化,鉆頭軸向位移在65~261 mm之間,鉆頭角速度在?8.9~8.9(°)/s之間變化。
5 結論
(1)根據全旋轉內置式可控彎接頭的結構特點,建立了該機構的空間機構模型以及運動學模型,并對鉆頭以及內外偏心環的運動特性進行了分析。
圖9不同角速度下鉆頭的軌跡曲線Fig.9 Bit’s trajectory curve under different angular velocities

圖10鉆頭角位移、軸向位移和角速度的仿真結果Fig.10 Simulation result of bit’s angular displacement,axial displacement and angular velocity
(2)仿真分析結果表明,當內外偏心環角速度相等,且不等于旋轉外套角速度時,鉆頭和偏心環的軌跡是空間上的一個圓;當內外偏心環角速度均值等于旋轉外套角速度,且內外偏心環角速度不等時,鉆頭和偏心環的軌跡都為空間上的一條直線;當內外偏心環以及旋轉外套角速度均相等時,鉆頭的軌跡為空間中的一點,而偏心環的軌跡則為空間上的一個圓;當內外偏心環以及旋轉外套角速度均不等時,鉆頭和偏心環的軌跡為空間上的螺旋線。
(3)基于MATLAB對鉆頭與偏心環軌跡進行理論仿真,同時運用SolidWorks Motion 對機構進行三維運動仿真,驗證了其正確性,通過對導向軸和偏心環的仿真和分析,得到了導向軸和偏心環的速度、加速度、位移等隨時間的變化規律,為全旋轉內置式導向鉆井工具的研究以及實現對鉆井系統的最優設計提供參考。