基于鉆井模型與人工智能相耦合的實(shí)時(shí)智能鉆井監(jiān)測(cè)技術(shù)
2020-06-16 05:20:54王茜張菲菲李紫璇王越支方含之
石油鉆采工藝 2020年1期
關(guān)鍵詞:模型
王茜 張菲菲 李紫璇 王越支 方含之
長(zhǎng)江大學(xué)石油工程學(xué)院
0 引言
隨著人類(lèi)對(duì)油氣資源需求的增長(zhǎng),石油勘探開(kāi)發(fā)的速度不斷提高,鉆井新技術(shù)迅速推廣,鉆井風(fēng)險(xiǎn)隨之增大,嚴(yán)重威脅鉆井安全。鉆井復(fù)雜是鉆井工程安全快速開(kāi)展的決定性影響因素,鉆井復(fù)雜一旦發(fā)生,其處理將會(huì)增加非作業(yè)時(shí)間,極大增加鉆井成本。多年來(lái),很多技術(shù)專(zhuān)家和現(xiàn)場(chǎng)技術(shù)人員一直在研究減少鉆井復(fù)雜的方法,早期的鉆井復(fù)雜判斷主要是通過(guò)監(jiān)測(cè)一些關(guān)鍵鉆井參數(shù),由人工判斷鉆井施工過(guò)程是否發(fā)生異常。但鉆井是一個(gè)長(zhǎng)期且連續(xù)的過(guò)程,鉆井參數(shù)的微小變化可能就是鉆井異常發(fā)生的先兆,人的精力有限,并不能持續(xù)高度關(guān)注鉆井參數(shù)的細(xì)微變化,所以異常識(shí)別和預(yù)警的質(zhì)量難以保證。隨著錄井儀器的進(jìn)步,可以獲取準(zhǔn)確的井底參數(shù),結(jié)合實(shí)時(shí)錄井?dāng)?shù)據(jù)可以得到鉆井預(yù)警參數(shù)的連續(xù)變化值,但是鉆井復(fù)雜的預(yù)警標(biāo)準(zhǔn)僅基于閾值,判別方法過(guò)于簡(jiǎn)單,缺少智能性[1-2]。而得益于人工智能技術(shù)的快速發(fā)展,模糊邏輯法、人工神經(jīng)網(wǎng)絡(luò)、專(zhuān)家系統(tǒng)、灰色關(guān)聯(lián)分析法等一系列智能方法[3-6]被引用到鉆井復(fù)雜監(jiān)測(cè)中,人工智能與鉆井故障診斷的結(jié)合使鉆井故障預(yù)測(cè)變得越來(lái)越高效和準(zhǔn)確,但鉆井過(guò)程中的不確定性、模糊性、隨機(jī)干擾等都是潛在的問(wèn)題,僅利用人工智能方法會(huì)由于算法本身的問(wèn)題產(chǎn)生一定的局限性,對(duì)故障診斷的準(zhǔn)確監(jiān)測(cè)造成影響[7]。筆者在研究了常見(jiàn)鉆井故障診斷方法優(yōu)缺點(diǎn)的基礎(chǔ)上,提出采用動(dòng)態(tài)物理模型和人工智能相結(jié)合的方法對(duì)常見(jiàn)的鉆井復(fù)雜進(jìn)行監(jiān)測(cè)和預(yù)警,通過(guò)取長(zhǎng)補(bǔ)短改善各算法自身的不足。將動(dòng)態(tài)鉆井物理模型與人工智能、數(shù)據(jù)挖掘算法相結(jié)合,研究基于實(shí)時(shí)錄井?dāng)?shù)據(jù)的實(shí)時(shí)鉆井監(jiān)測(cè)及鉆井事故預(yù)警技術(shù),然后從實(shí)時(shí)井眼清潔及水力學(xué)監(jiān)測(cè)、實(shí)時(shí)卡鉆預(yù)測(cè)、實(shí)時(shí)井涌監(jiān)測(cè)3個(gè)方面對(duì)實(shí)時(shí)鉆井監(jiān)測(cè)及預(yù)警技術(shù)進(jìn)行了詳細(xì)的分析,闡述實(shí)時(shí)智能鉆井監(jiān)測(cè)技術(shù)實(shí)現(xiàn)方法。
1 實(shí)時(shí)井眼清潔監(jiān)測(cè)
結(jié)合巖屑運(yùn)移規(guī)律,建立實(shí)時(shí)井眼清潔計(jì)算模型,引入模型自動(dòng)修正算法,對(duì)鉆井過(guò)程中的各種不確定性參數(shù)實(shí)時(shí)反演修正,使模型能準(zhǔn)確監(jiān)控整個(gè)鉆井過(guò)程中巖屑在定向井全井段的連續(xù)運(yùn)移和堆積的過(guò)程。
1.1 井眼清潔實(shí)時(shí)監(jiān)測(cè)流程
根據(jù)巖屑累積和運(yùn)移的特點(diǎn),結(jié)合現(xiàn)場(chǎng)工藝,在井眼清潔實(shí)時(shí)監(jiān)測(cè)時(shí),要充分利用實(shí)鉆操作參數(shù)及目標(biāo)井工程設(shè)計(jì)資料建立綜合輸入信息。實(shí)時(shí)采集綜合錄井關(guān)鍵參數(shù),通過(guò)關(guān)鍵參數(shù)的代入計(jì)算,實(shí)時(shí)預(yù)測(cè)動(dòng)態(tài)巖屑分布及井眼壓力,實(shí)現(xiàn)井眼清潔的實(shí)時(shí)監(jiān)測(cè)。該模塊整體框架如圖1所示。
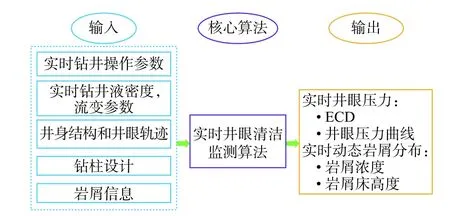
圖1井眼清潔模塊整體框架Fig.1 Overall framework of hole cleaning module
1.2 核心算法介紹
鉆井過(guò)程是一個(gè)動(dòng)態(tài)過(guò)程,鉆井參數(shù)(如鉆井泵排量、鉆速、鉆柱轉(zhuǎn)速等)不斷發(fā)生變化,巖屑的流動(dòng)形態(tài)也會(huì)隨鉆井參數(shù)的變化在幾種流型中切換。根據(jù)巖屑流型劃分標(biāo)準(zhǔn)[8],環(huán)空內(nèi)巖屑所有的分布形式如圖2所示。實(shí)時(shí)井眼清潔監(jiān)測(cè)算法是將巖屑運(yùn)移過(guò)程在時(shí)間域上離散化,將需要計(jì)算的時(shí)間域分成眾多的區(qū)間(每個(gè)區(qū)間的長(zhǎng)度即為時(shí)間步)來(lái)進(jìn)行計(jì)算,通過(guò)實(shí)時(shí)更新時(shí)間步巖屑量(包括懸浮巖屑濃度和巖屑床高度)和壓力梯度實(shí)現(xiàn)實(shí)時(shí)監(jiān)測(cè)。在每個(gè)時(shí)間步,巖屑的流型都有可能發(fā)生變化,因此,在每個(gè)時(shí)間步內(nèi),模擬計(jì)算的第1步就是結(jié)合井筒內(nèi)狀態(tài)判斷當(dāng)前巖屑流型,其自動(dòng)判斷過(guò)程如圖3所示,具體的判斷依據(jù)見(jiàn)文獻(xiàn)[8]。根據(jù)巖屑流型,結(jié)合瞬態(tài)質(zhì)量和動(dòng)量守恒方程自動(dòng)構(gòu)建模型方程組,其模型構(gòu)建方法如圖2箭頭所示(例如圖2a流型只需結(jié)合公式(2)、(5)構(gòu)建模型方程組)。基于巖屑流型組建的方程組,求解當(dāng)前時(shí)間步巖屑量,并根據(jù)巖屑分布情況,結(jié)合環(huán)空壓耗與井眼清潔程度耦合模型更新壓力分布,整個(gè)核心算法計(jì)算流程如圖4所示。

圖2巖屑分布流型示意圖Fig.2 Sketch of cuttings distribution flow pattern
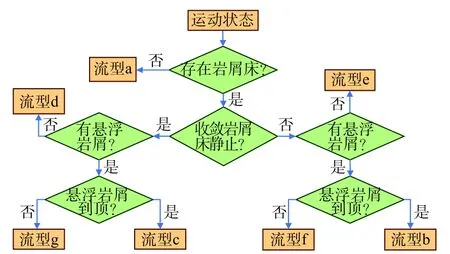
圖3流型自動(dòng)判斷流程Fig.3 Flow chart of automatic flow pattern discrimination

圖4動(dòng)態(tài)井眼清潔監(jiān)測(cè)及環(huán)空壓力計(jì)算流程圖Fig.4 Flow chart of dynamic hole cleaning monitoring and annulus pressure calculation
動(dòng)態(tài)巖屑運(yùn)移模型基于固液兩相的質(zhì)量和動(dòng)量守恒方程。做出以下假設(shè):(1)對(duì)于不穩(wěn)定流型,假定固相是同時(shí)移動(dòng)的,而非交替移動(dòng),通過(guò)動(dòng)量守恒將移動(dòng)固相的速度平均化為所有固相的速度;(2)結(jié)合假設(shè)1,根據(jù)懸浮巖屑的狀態(tài),將2個(gè)不穩(wěn)定的流動(dòng)流型簡(jiǎn)化為圖2的b、e、f;(3)流動(dòng)區(qū)域上的壓力梯度與充填巖屑的壓力梯度相同,由于壓力梯度,巖屑中流體也會(huì)流動(dòng),然而,與流動(dòng)區(qū)域上的高速流動(dòng)相比,速度很小可以忽略不計(jì);(4)鉆桿旋轉(zhuǎn)的影響通過(guò)流動(dòng)區(qū)域沉降速度和再懸浮速度的變化決定,而等效系數(shù)通過(guò)以前的實(shí)驗(yàn)研究獲得[9];(5)在每個(gè)模擬網(wǎng)格內(nèi),固相床高在一個(gè)時(shí)間步長(zhǎng)內(nèi)恒定;(6)充填巖屑床/沙丘的孔隙度恒定;(7)巖屑的粒度以平均巖屑大小表示;(8)未考慮直徑小于0.1 mm的小顆粒黏土。方程中的一些參數(shù)可以根據(jù)不同的流動(dòng)模式自動(dòng)設(shè)置為0,構(gòu)建通用模型,這使得處理時(shí)間和位置的流型轉(zhuǎn)換更容易,能更好地實(shí)現(xiàn)動(dòng)態(tài)巖屑流動(dòng)模擬。
圖2中上液層、混合層、巖屑床層3個(gè)區(qū)域的質(zhì)量守恒分別用公式(1)、(2)、(3)表示。
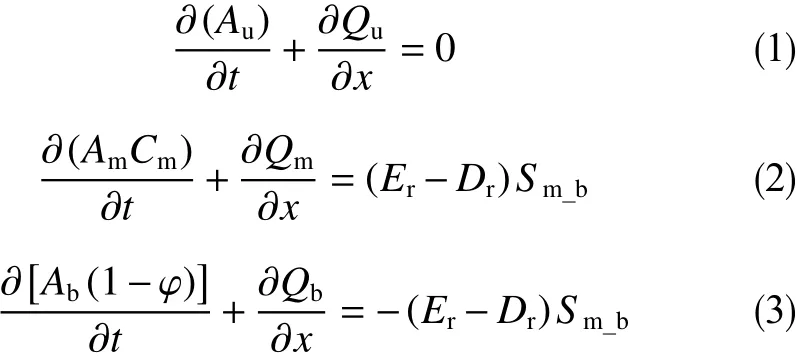
圖2中上液層、混合層、巖屑床層3個(gè)區(qū)域的動(dòng)量守恒分別用公式(4)、(5)、(6)表示。
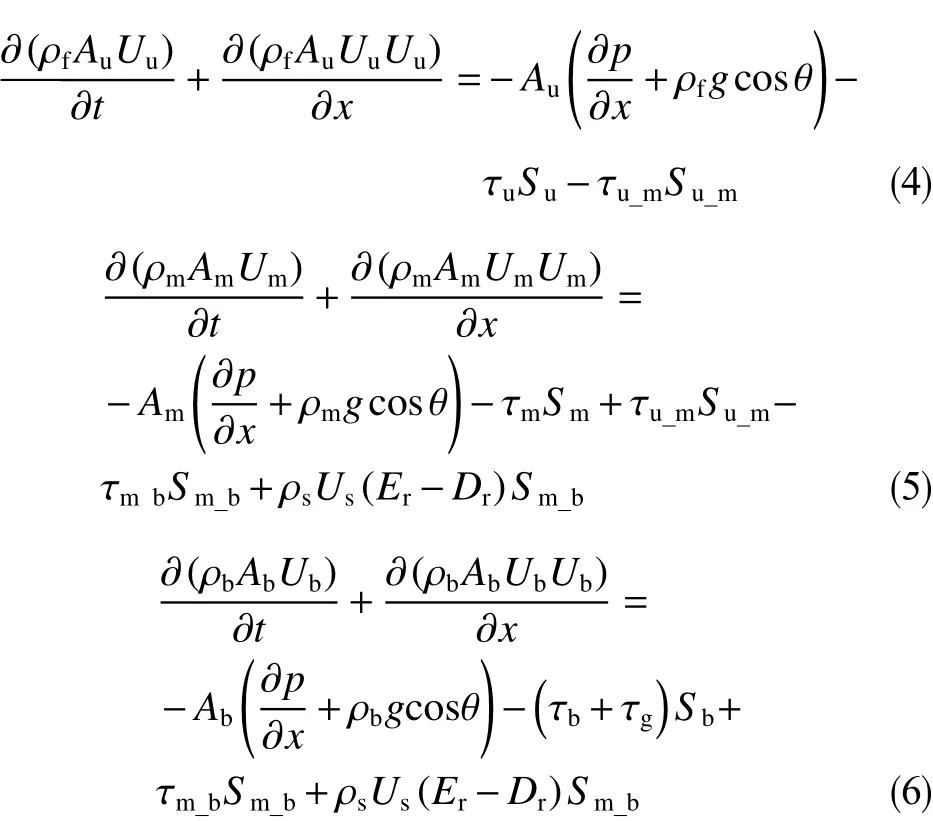
式中,A為截面面積,mm2;C為巖屑濃度,%; φ為填充巖屑的孔隙率,無(wú)量綱;Q為流量,L/s;Er為巖屑懸浮率,無(wú)量綱;Dr為巖屑沉降率,無(wú)量綱;U為流速,m/s;S為周長(zhǎng),m;ρf為鉆井液密度,g/cm3;ρm為混合層密度,g/cm3;ρb為巖屑密度,g/cm3;g為重力加速度,m/s2;τ為剪應(yīng)力,Pa;τg表示填充巖屑顆粒間鉆井液的切應(yīng)力之間造成額外的連接,Pa;?p/?x為壓力梯度,MPa/m;θ為井斜角,°。下標(biāo):u 表示上液層,m 表示混合層,b表示固體床層,u_m 表示上液層和混合層之間的界面,m_b表示固定床層和混合層之間的界面。
巖屑對(duì)環(huán)空壓耗有重要影響[10-11],巖屑的存在改變了環(huán)空內(nèi)混合流體的平均密度和有效的環(huán)空流動(dòng)面積,增大流體與環(huán)空表面的摩擦因數(shù)。瞬態(tài)壓力計(jì)算模型充分考慮了巖屑的影響,環(huán)空壓耗計(jì)算耦合了井眼清潔程度,計(jì)算公式為

1.3 模型求解
模型采用有限差分格式求解,需要將整個(gè)井眼按時(shí)間步劃分網(wǎng)格(如圖5所示),針對(duì)每個(gè)網(wǎng)格,構(gòu)建離散的巖屑運(yùn)移模型方程組,利用迎風(fēng)模式對(duì)方程組進(jìn)行差分求解。
迎風(fēng)格式是一種自適應(yīng)的有限差分算法,將模擬的井眼劃分完網(wǎng)格后,在每個(gè)時(shí)間步,網(wǎng)格i的巖屑質(zhì)量守恒方程中的對(duì)流項(xiàng)會(huì)根據(jù)巖屑在i?1和i+1的速度方向變化而發(fā)生變化。使用迎風(fēng)算法,該項(xiàng)差分后可以用式(8)來(lái)表示。每個(gè)差分項(xiàng)都受相鄰兩個(gè)網(wǎng)格的影響,“+”和“?”代表速度的方向,該算法使模型適應(yīng)鉆井過(guò)程中鉆井參數(shù)和井下工況條件的快速、復(fù)雜變化。

其中

1.4 模型自我修正
當(dāng)模型計(jì)算與實(shí)時(shí)測(cè)量數(shù)據(jù)出現(xiàn)偏差時(shí),結(jié)合人工智能方法,模型會(huì)根據(jù)偏差狀況自動(dòng)進(jìn)行自我修正。
(1)收集誤差結(jié)果。收集一段時(shí)間內(nèi)實(shí)測(cè)數(shù)據(jù)(立壓、井底壓力)、模擬結(jié)果以及鉆井操作參數(shù)。
(2)分析自我修正前提條件。實(shí)測(cè)數(shù)據(jù)在實(shí)時(shí)傳輸過(guò)程中可能會(huì)因各種原因產(chǎn)生數(shù)據(jù)噪聲,低質(zhì)量的數(shù)據(jù)將會(huì)影響模型修正結(jié)果。因此,模型自我修正前還需要確定誤差是模型自身引起,還是由實(shí)時(shí)參數(shù)不穩(wěn)定引起的噪音。通過(guò)人為設(shè)定監(jiān)測(cè)值來(lái)確定數(shù)據(jù)有效性,監(jiān)測(cè)鉆井參數(shù)(鉆井泵排量、轉(zhuǎn)速、鉆速、鉆壓)規(guī)定時(shí)間窗口內(nèi)的發(fā)散度,計(jì)算與實(shí)測(cè)數(shù)據(jù)偏差分布發(fā)散度等。
(3)誤差評(píng)價(jià)。工程上通過(guò)測(cè)試泛化誤差來(lái)評(píng)價(jià)模型的預(yù)測(cè)能力。泛化誤差可分解為偏差、方差兩部分,偏差描述的是模型預(yù)測(cè)值與實(shí)測(cè)值之間的差距,用來(lái)衡量預(yù)測(cè)結(jié)果精密度高低,可用式(9)計(jì)算;方差描述的是模型在進(jìn)行同類(lèi)預(yù)測(cè)時(shí)出現(xiàn)的波動(dòng)程度,用數(shù)據(jù)離散程度來(lái)衡量模型的穩(wěn)定性,可用式(10)計(jì)算。兩者值越小,對(duì)應(yīng)的泛化誤差也就越小。通過(guò)計(jì)算一段時(shí)間內(nèi)井筒壓力計(jì)算結(jié)果與實(shí)測(cè)數(shù)據(jù)的泛化誤差來(lái)確定是否需要進(jìn)行自我修正,當(dāng)誤差超過(guò)設(shè)定的范圍就有必要進(jìn)行模型自我修正。

式中,di為偏差,yi為測(cè)量值,為測(cè)量平均值, σ2為方差。
(4)模型自我修正。模型自我修正基于模型不確定參數(shù)的尋優(yōu),以改善模型的正確率。為了實(shí)現(xiàn)模型自我修正,需要結(jié)合模型設(shè)定一些不確定的調(diào)節(jié)參數(shù)(實(shí)際井眼大小、鉆井液在井下環(huán)境中的實(shí)際性能、鉆柱在井眼中的實(shí)際位置、傳感器測(cè)量誤差、摩擦因數(shù)等),這些不確定參數(shù)在井筒中處于多變、難以測(cè)量的狀態(tài),卻又極大影響著實(shí)測(cè)數(shù)據(jù),不確定參數(shù)求解的準(zhǔn)確度關(guān)系到整個(gè)模型預(yù)測(cè)結(jié)果的準(zhǔn)確度。當(dāng)模擬結(jié)果與實(shí)際反饋不符時(shí),根據(jù)偏差參數(shù)的性質(zhì)和偏差大小(例如鉆井過(guò)程中的實(shí)時(shí)測(cè)量數(shù)據(jù)、振動(dòng)篩巖屑返回情況以及現(xiàn)場(chǎng)施工情況對(duì)模型預(yù)測(cè)的風(fēng)險(xiǎn)系數(shù)和決策方案的反饋),自動(dòng)構(gòu)建偏差調(diào)整的目標(biāo)函數(shù),然后通過(guò)貝葉斯優(yōu)化算法對(duì)目標(biāo)函數(shù)進(jìn)行求解,通過(guò)構(gòu)建并行計(jì)算架構(gòu),將模型快速自動(dòng)調(diào)整到與實(shí)際情況最接近的狀態(tài)(如圖6所示),從而得到模型的自我修正方法,進(jìn)而提高模型預(yù)測(cè)能力。
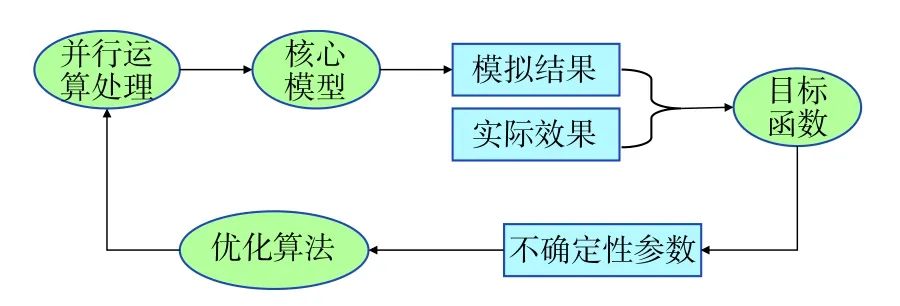
圖6模型自動(dòng)修正技術(shù)路線(xiàn)Fig.6 Technical route of automatic model correction
2 實(shí)時(shí)卡鉆預(yù)測(cè)
實(shí)時(shí)卡鉆預(yù)測(cè)算法采用實(shí)時(shí)水力學(xué)和摩阻扭矩模型分析與實(shí)時(shí)數(shù)據(jù)分析相結(jié)合的方法,確定實(shí)時(shí)數(shù)據(jù)與模型預(yù)測(cè)值之間的偏差,以及實(shí)時(shí)數(shù)據(jù)的趨勢(shì)分析(即變化率)。水力學(xué)計(jì)算利用已有公式,摩阻扭矩模型利用經(jīng)典軟桿模型。
2.1 卡鉆監(jiān)測(cè)指標(biāo)
主要使用2種類(lèi)型的數(shù)據(jù)特征來(lái)實(shí)時(shí)監(jiān)測(cè)卡鉆:實(shí)際數(shù)據(jù)與模型預(yù)測(cè)值的偏差(MVA)和實(shí)際數(shù)據(jù)的變化率(ROC)。
2.1.1 單個(gè)數(shù)據(jù)點(diǎn)的MVA將傳感器實(shí)時(shí)測(cè)量的實(shí)際值與實(shí)時(shí)水力模型或摩阻扭矩模型計(jì)算的預(yù)測(cè)值相比較,當(dāng)實(shí)際值與模型值的差值在允許的容差范圍內(nèi)時(shí),不會(huì)出現(xiàn)卡鉆事件;當(dāng)偏差過(guò)大超出容差范圍時(shí),卡鉆的風(fēng)險(xiǎn)便會(huì)增加。數(shù)據(jù)點(diǎn)x的MVA 偏差計(jì)算公式為

式中,D為偏差;xr為實(shí)測(cè)數(shù)值;xp為模型預(yù)測(cè)值。
2.1.2 單個(gè)數(shù)據(jù)點(diǎn)的ROCROC 通過(guò)識(shí)別關(guān)鍵參數(shù)的快速變化來(lái)監(jiān)測(cè)潛在問(wèn)題,且不需要參考模型值。式中數(shù)據(jù)點(diǎn)x在區(qū)間[a,b]的ROC計(jì)算公式為

式中,Rs為變化率,xb為數(shù)據(jù)點(diǎn)在b處的實(shí)測(cè)值,xa為數(shù)據(jù)點(diǎn)在a處的實(shí)測(cè)值。
由于摩阻扭矩和水力學(xué)模型不能完全符合鉆井實(shí)際情況,傳感器也存在校準(zhǔn)或測(cè)量誤差等原因,使得實(shí)時(shí)數(shù)據(jù)中會(huì)存在一些異常值,需要利用數(shù)據(jù)平滑的方法消除這些異常值。由于數(shù)據(jù)采樣或數(shù)據(jù)平滑技術(shù)的影響,某個(gè)參數(shù)在較小的深度或時(shí)間間隔內(nèi)偏離基線(xiàn)時(shí),可能無(wú)法生成MVA 警報(bào),ROC的利用可以彌補(bǔ)這一缺陷。
結(jié)合卡鉆監(jiān)測(cè)參數(shù),由MVA 和ROC作為卡鉆監(jiān)測(cè)指標(biāo)可以引申發(fā)展出6個(gè)監(jiān)測(cè)指標(biāo):地面扭矩?cái)?shù)據(jù)與模型值的偏差,大鉤載荷數(shù)據(jù)與模型值的偏差,立管壓力數(shù)據(jù)與模型值的偏差,地面扭矩?cái)?shù)據(jù)變化率,大鉤載荷數(shù)據(jù)變化率,立管壓力數(shù)據(jù)變化率。
2.2 閾值確定
閾值的確定需要依靠歷史卡鉆參數(shù)來(lái)確定。6個(gè)監(jiān)測(cè)指標(biāo)中每個(gè)都確定了1個(gè)閾值,低于該閾值卡鉆的風(fēng)險(xiǎn)非常低。不同的閾值水平取決于6種常見(jiàn)鉆井活動(dòng)的鉆機(jī)狀態(tài)。
2.3 卡鉆風(fēng)險(xiǎn)指數(shù)(SPR)計(jì)算
將前文提出的監(jiān)測(cè)指標(biāo)組合成1個(gè)綜合風(fēng)險(xiǎn)系數(shù),其數(shù)值介于0~1之間。因?yàn)槟ψ枧ぞ鼗蛩δP皖A(yù)測(cè)很大程度上取決于鉆井狀態(tài),所以當(dāng)SPR 計(jì)算系統(tǒng)接收時(shí)間序列的鉆井?dāng)?shù)據(jù)時(shí),算法會(huì)自動(dòng)為每一行輸入數(shù)據(jù)分配一個(gè)鉆井狀態(tài)。
2.4 實(shí)時(shí)卡鉆預(yù)測(cè)流程
實(shí)時(shí)卡鉆風(fēng)險(xiǎn)預(yù)測(cè)流程如下:
(1)利用數(shù)據(jù)平滑的方法計(jì)算特定鉆頭深度下卡鉆監(jiān)測(cè)指標(biāo)的偏差值和變化率,并考慮其對(duì)應(yīng)時(shí)間步的鉆井狀態(tài)。
(2)計(jì)算數(shù)據(jù)點(diǎn)與模型的偏差。首先需要確定實(shí)際數(shù)據(jù)與預(yù)測(cè)模型值之間的百分比差異,利用摩阻扭矩模型和水力學(xué)模型計(jì)算在指定時(shí)間間隔內(nèi)的預(yù)測(cè)值。由于實(shí)測(cè)數(shù)據(jù)測(cè)量頻率較高,為使模型數(shù)據(jù)可與實(shí)測(cè)數(shù)據(jù)對(duì)比分析,需要通過(guò)對(duì)模型計(jì)算結(jié)果插值任意深度的預(yù)測(cè)值。
(3)計(jì)算每個(gè)點(diǎn)的偏差百分比,并計(jì)算所有這些點(diǎn)的簡(jiǎn)單移動(dòng)平均值,然后與偏差閾值進(jìn)行比較。計(jì)算的偏差低于可接受的閾值時(shí),不會(huì)生成警報(bào)。該方法的主要缺點(diǎn)是不能區(qū)分大幅度超過(guò)閾值的偏差與小幅度超出閾值的偏差。為解決該問(wèn)題開(kāi)發(fā)了警報(bào)加權(quán)系統(tǒng)。如果偏差與閾值之比大于等于3,則警報(bào)級(jí)別上限為3。這提供了理論上的最大警報(bào)級(jí)別,有助于防止無(wú)關(guān)數(shù)據(jù)點(diǎn)對(duì)警報(bào)級(jí)別產(chǎn)生過(guò)大的影響。
計(jì)算扭矩偏差警報(bào)級(jí)別后,使用相同的過(guò)程來(lái)計(jì)算大鉤荷載和立管壓力的警報(bào)級(jí)別。每個(gè)警報(bào)級(jí)別的上限為3,因此可以達(dá)到的最大警報(bào)級(jí)別為9。
ROC的計(jì)算所利用的區(qū)間1和區(qū)間2的移動(dòng)平均值是通過(guò)直接從實(shí)時(shí)鉆井?dāng)?shù)據(jù)獲取的原始測(cè)量值來(lái)計(jì)算的。

式中,M為移動(dòng)平均值,下標(biāo)1、2分別表示區(qū)間1、區(qū)間2的移動(dòng)平均值。
與MVA 的警報(bào)級(jí)別相同,ROC計(jì)算的最大可實(shí)現(xiàn)警報(bào)級(jí)別為9。將MVA 和ROC警報(bào)結(jié)合在一起可產(chǎn)生18個(gè)可能的警報(bào)級(jí)別。
(4)將實(shí)際警報(bào)級(jí)別與最大警報(bào)級(jí)別進(jìn)行比較,以計(jì)算卡鉆風(fēng)險(xiǎn),實(shí)時(shí)卡鉆風(fēng)險(xiǎn)等于實(shí)際警報(bào)級(jí)別與最大警報(bào)級(jí)別比值。
一般來(lái)說(shuō),最大警報(bào)級(jí)別是所監(jiān)控參數(shù)數(shù)量的6倍。這是因?yàn)镸VA 和ROC方法(每個(gè)方法的上限為3)應(yīng)用于每個(gè)參數(shù)。對(duì)于參數(shù)少于6個(gè)的鉆機(jī)狀態(tài)(例如起下鉆),算法正確地考慮了較低的最大警報(bào)級(jí)別數(shù)。
3 實(shí)時(shí)井涌預(yù)測(cè)
利用統(tǒng)計(jì)分析實(shí)時(shí)鉆井?dāng)?shù)據(jù)的方法,根據(jù)井涌發(fā)生的特點(diǎn),使用兩個(gè)井涌監(jiān)測(cè)指標(biāo),引入自動(dòng)實(shí)時(shí)監(jiān)測(cè)異常趨勢(shì)的時(shí)間序列分析算法,并建立從實(shí)時(shí)鉆井?dāng)?shù)據(jù)中自動(dòng)提前監(jiān)測(cè)的工作流程,最終實(shí)現(xiàn)早期井涌監(jiān)測(cè)。
3.1 井涌監(jiān)測(cè)指標(biāo)
d指數(shù)作為早期井涌監(jiān)測(cè)的主要指標(biāo),在油氣工業(yè)中應(yīng)用于異常壓力地層的識(shí)別和異常孔隙壓力的監(jiān)測(cè)。Jorden 和Shirley[12]介紹了d指數(shù)的概念,將鉆速、轉(zhuǎn)速、鉆壓和鉆頭尺寸相結(jié)合,計(jì)算公式為

式中,V為鉆速,m/h;N為轉(zhuǎn)速,rad/min;W為鉆壓,kN;Db為鉆頭尺寸,mm。
在正常壓力層段,d指數(shù)隨深度的增加呈增長(zhǎng)趨勢(shì)。當(dāng)鉆遇壓力過(guò)大的地層時(shí),d指數(shù)將偏離原始的增長(zhǎng)趨勢(shì),遵循較慢的增長(zhǎng)或降低趨勢(shì)[13]。鉆進(jìn)過(guò)程中大多數(shù)井涌發(fā)生在穿過(guò)壓力過(guò)大的區(qū)域,因此d指數(shù)可用作監(jiān)測(cè)異常壓力地層的實(shí)時(shí)指標(biāo),是井涌監(jiān)測(cè)的一個(gè)很好的指標(biāo)。
井涌產(chǎn)生時(shí),鉆井液排出量大于泵入量。將鉆井液泵入量、排出量、立管壓力結(jié)合計(jì)算得出經(jīng)過(guò)壓力校準(zhǔn)的鉆井泵排量差值。井涌產(chǎn)生時(shí),鉆井泵排量差值呈增長(zhǎng)趨勢(shì),表明鉆井液排出量與泵入量相比是增加的,在后續(xù)章節(jié)將鉆井泵排量差值記為流量監(jiān)測(cè)指標(biāo),計(jì)算公式為

式中,Qf為鉆井泵排量差值,L/s;Qo為鉆井液排出量,L/s;Qi為鉆井液泵入量,L/s;ps為立管壓力,MPa;cr為鉆井液的壓縮系數(shù),無(wú)量綱;pr為參考?jí)毫Γ?.1 MPa。
井底壓力關(guān)系著井筒壓力系統(tǒng)是否平衡,是監(jiān)測(cè)溢流的重要參數(shù)。井底壓力小于地層壓力,意味著井底流體的流入即溢流的發(fā)生。故將地層壓力與實(shí)時(shí)井底壓力的偏差,作為進(jìn)一步判斷溢流的監(jiān)測(cè)指標(biāo),計(jì)算公式為

式中,Δp為井底壓力與預(yù)測(cè)值的偏差,MPa;pm為地層壓力,MPa;pc為實(shí)測(cè)井底壓力,MPa。
3.2 實(shí)時(shí)數(shù)據(jù)的異常監(jiān)測(cè)
自動(dòng)監(jiān)測(cè)實(shí)時(shí)數(shù)據(jù)的異常包括實(shí)時(shí)量化數(shù)據(jù)趨勢(shì)和區(qū)分局部波動(dòng)與長(zhǎng)期趨勢(shì)2個(gè)部分。對(duì)于實(shí)時(shí)數(shù)據(jù)所顯示的增長(zhǎng)趨勢(shì),引入移動(dòng)平均值的偏差,計(jì)算公式為

式中,Mα和Mβ為t時(shí)刻的移動(dòng)平均值;α和β為滑動(dòng)窗口長(zhǎng)度;ΔM為t時(shí)刻移動(dòng)平均值的差值。
短滑動(dòng)窗口的平均值比長(zhǎng)滑動(dòng)窗口的平均值移動(dòng)得更快。同一時(shí)刻,當(dāng)較短窗口的移動(dòng)平均值大于較長(zhǎng)窗口的移動(dòng)平均值時(shí),ΔM為正值,這表示數(shù)據(jù)呈增加趨勢(shì);相反,ΔM為負(fù)值時(shí),呈減小趨勢(shì)。圖7展示該方法量化數(shù)據(jù)趨勢(shì)的效果。
上述技術(shù)僅適用于量化數(shù)據(jù)的增加和降低趨勢(shì)。為了量化數(shù)據(jù)的較慢增長(zhǎng)趨勢(shì),將滑動(dòng)窗線(xiàn)性回歸應(yīng)用于實(shí)時(shí)數(shù)據(jù),將時(shí)刻t處回歸的斜率值記為Ki,t,正值為正趨勢(shì),負(fù)值為負(fù)趨勢(shì)。

圖7利用移動(dòng)平均值偏差量化數(shù)據(jù)趨勢(shì)Fig.7 Quantification of data trend using the deviation of moving average
式(18)是一個(gè)邏輯函數(shù),表示從0到1的指數(shù)轉(zhuǎn)換

平均局部斜率的計(jì)算公式為

平均局部斜率差值的計(jì)算公式為

式中,λ1,λ2分別為控制過(guò)渡的位置和銳度,λ1=0.5?α,λ2=0.1;wi為時(shí)間步驟t之前數(shù)據(jù)點(diǎn)i的加權(quán)因子,當(dāng)i<t?α?xí)r,加權(quán)因子接近0;當(dāng)t?α<i≤t時(shí),加權(quán)因子接近1;分別為滑動(dòng)窗口長(zhǎng)度α和β的平均局部斜率;為t時(shí)刻的平均局部斜率差值。
首先用5 min 的滑動(dòng)窗口得到監(jiān)測(cè)指標(biāo)的局部斜率,再計(jì)算K1min與K3min差值,如圖8(a)。與平均移動(dòng)偏差分析相似,平均局部斜率差值為負(fù),表示數(shù)據(jù)的減速趨勢(shì)。將為0作為信號(hào)線(xiàn),每當(dāng)平均局部斜率值越過(guò)信號(hào)線(xiàn)時(shí),就可以監(jiān)測(cè)到局部較慢的增加或減少趨勢(shì),如圖8(b)。圖8(c)以d指數(shù)監(jiān)測(cè)指標(biāo)為例,展示了該方法量化數(shù)據(jù)加減速趨勢(shì)效果。
3.3 局部趨勢(shì)鑒別
對(duì)于實(shí)時(shí)監(jiān)測(cè),很難確定此次的下降趨勢(shì)是局部波動(dòng)還是井涌發(fā)生預(yù)兆。引入概率分析算法可使該視覺(jué)監(jiān)測(cè)過(guò)程自動(dòng)化并量化。
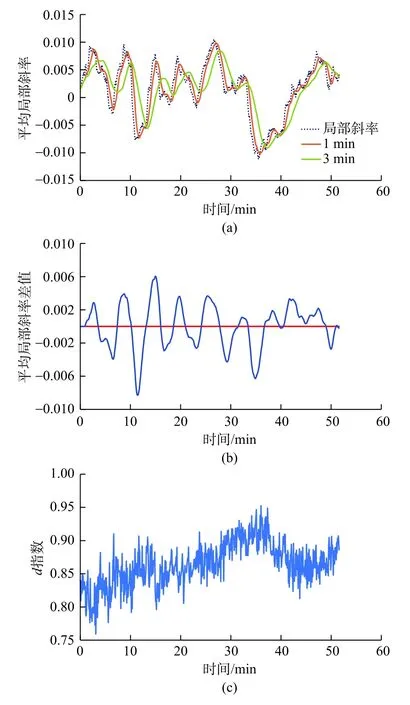
圖8利用加權(quán)移動(dòng)平均值量化數(shù)據(jù)加減速趨勢(shì)Fig.8 Quantification of data acceleration/deceleration trend using the weighted moving average
該算法基于平均局部斜率差值給出的處理信號(hào)。每當(dāng)監(jiān)測(cè)到局部異常趨勢(shì),將計(jì)算基于異常趨勢(shì)前數(shù)據(jù)的線(xiàn)性回歸預(yù)測(cè),再將預(yù)測(cè)值和實(shí)際值的偏差與時(shí)間積分得到偏差面積,最終將偏差面積除以特定的容差值獲得概率值。圖9為利用概率分析的方法進(jìn)行局部區(qū)別鑒定的效果,每當(dāng)監(jiān)測(cè)到局部下降趨勢(shì)時(shí),將計(jì)算基于下降趨勢(shì)前d指數(shù)的線(xiàn)性回歸預(yù)測(cè),如圖9a 中的直線(xiàn)1和2。圖9b中柱狀圖所顯示的數(shù)值為預(yù)測(cè)值與實(shí)際值的偏差,記為Δd。將Δd與時(shí)間積分計(jì)算得到偏差面積,再通過(guò)將偏差面積除以特定的容差值進(jìn)一步獲得概率值,其中P是d指數(shù)的概率值。
偏差面積和概率計(jì)算公式分別為


圖9利用概率分析算法進(jìn)行局部趨勢(shì)鑒定Fig.9 Local trend evaluation using the probability analysis algorithm

式中,S為偏差面積;Dp為預(yù)測(cè)值;Da為實(shí)際值;P為概率;St為容差值。
對(duì)于上述計(jì)算,如果偏差面積的值大于公差值,則概率值為1。
3.4 井涌風(fēng)險(xiǎn)指數(shù)
井涌風(fēng)險(xiǎn)指數(shù)可以通過(guò)將不同的加權(quán)因子分配給d指數(shù)監(jiān)測(cè)指標(biāo)、流量監(jiān)測(cè)指標(biāo)和壓力監(jiān)測(cè)指標(biāo)的概率值來(lái)計(jì)算。井涌風(fēng)險(xiǎn)指數(shù)值介于0~1之間,表示井涌事件發(fā)生的概率,計(jì)算公式為

式中,pd為d指數(shù)監(jiān)測(cè)指標(biāo),pf為流量監(jiān)測(cè)指標(biāo),pp為壓力監(jiān)測(cè)指標(biāo),Rk為井涌風(fēng)險(xiǎn)指數(shù),wd、wf、wp為加權(quán)因子。
3.5 井涌自動(dòng)監(jiān)測(cè)流程
井涌自動(dòng)監(jiān)測(cè)算法流程如圖10。實(shí)時(shí)鉆井?dāng)?shù)據(jù)按時(shí)間順序讀入算法。

圖10井涌自動(dòng)監(jiān)測(cè)算法流程Fig.10 Algorithm of automatic well kick monitoring
(1)首先評(píng)估數(shù)據(jù)是屬于旋轉(zhuǎn)鉆進(jìn)還是非鉆進(jìn)過(guò)程(如起下鉆、擴(kuò)孔或修井),在使用井涌監(jiān)測(cè)算法之前對(duì)實(shí)時(shí)數(shù)據(jù)進(jìn)行預(yù)處理,通過(guò)實(shí)時(shí)鉆井操作參數(shù)(例如鉆速、鉆壓、扭矩、泵活動(dòng)、井深和鉆頭位置)對(duì)鉆井狀態(tài)進(jìn)行評(píng)估。一旦確認(rèn)是旋轉(zhuǎn)鉆進(jìn)過(guò)程,將檢查輸入的數(shù)據(jù)是否屬于任何操作瞬態(tài)活動(dòng),例如泵速變化或阻流管線(xiàn)操作。上述預(yù)處理過(guò)程可以為后續(xù)的概率分析建立一個(gè)合理的起點(diǎn),并避免由瞬態(tài)事件引起的誤報(bào)警。
(2)基于當(dāng)前和先前時(shí)間步驟的數(shù)據(jù)計(jì)算井涌監(jiān)測(cè)指數(shù)和局部趨勢(shì)特征。如果平均移動(dòng)偏差值指示局部增加趨勢(shì)或者如果平均局部斜率差值指示局部呈較慢的增加或減少趨勢(shì),則進(jìn)一步進(jìn)行概率分析。
(3)通過(guò)為得到的概率值分配不同的加權(quán)因子,可以獲得最終的井涌風(fēng)險(xiǎn)指數(shù)。風(fēng)險(xiǎn)指數(shù)與井涌報(bào)警閾值比較,如果風(fēng)險(xiǎn)指數(shù)超過(guò)閾值,算法給出報(bào)警信號(hào)。
4 實(shí)例計(jì)算
將本文方法用計(jì)算機(jī)編程實(shí)現(xiàn)以后,針對(duì)1口實(shí)際井展開(kāi)實(shí)時(shí)數(shù)據(jù)的異常趨勢(shì)的監(jiān)測(cè)。圖11為一段時(shí)常為70 min 的傳統(tǒng)井涌監(jiān)測(cè)指標(biāo)(鉆井液泵入量、鉆井液排出量、轉(zhuǎn)速、鉆壓、扭矩和深度)實(shí)時(shí)數(shù)據(jù),該數(shù)據(jù)為每5 s記錄一次所得。圖12~14為監(jiān)測(cè)指標(biāo)(d指數(shù)、流量和壓力),圖中藍(lán)色線(xiàn)條為原始數(shù)據(jù),橘色實(shí)線(xiàn)是通過(guò)應(yīng)用內(nèi)核大小為51的中值濾波器處理后的數(shù)據(jù)。圖15為最終井涌風(fēng)險(xiǎn)指數(shù)。
圖11 數(shù)據(jù)顯示鉆井液排出量數(shù)據(jù)波動(dòng)明顯,但沒(méi)有明顯的增加趨勢(shì);鉆速在大部分時(shí)間呈平穩(wěn)變化,后期產(chǎn)生了一個(gè)幅度較大的波動(dòng);鉆壓在30~40 min 之間出現(xiàn)下降趨勢(shì);扭矩的波動(dòng)較大,總體呈緩慢增長(zhǎng)趨勢(shì);在36 min 左右,d指數(shù)監(jiān)測(cè)指標(biāo)呈現(xiàn)出明顯的下降趨勢(shì);壓力監(jiān)測(cè)指標(biāo)的變化趨勢(shì)符合井涌發(fā)生趨勢(shì)。3個(gè)井涌監(jiān)測(cè)指標(biāo)的概率如圖16所示,可以注意到d指數(shù)監(jiān)測(cè)指標(biāo)的概率一直在增加。盡管很難在視覺(jué)上觀察到,該算法還是成功地監(jiān)測(cè)了流量監(jiān)測(cè)指標(biāo)在15 min 之后所保持的增加趨勢(shì)。最終于40 min 左右觸發(fā)井涌報(bào)警,而該警報(bào)比實(shí)際監(jiān)測(cè)到井涌發(fā)生時(shí)間早14 min。
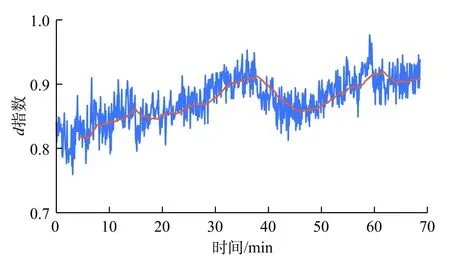
圖12 d 指數(shù)監(jiān)測(cè)指標(biāo)Fig.12 d index monitoring indicator

圖13流量監(jiān)測(cè)指標(biāo)Fig.13 Flow rate monitoring indicator
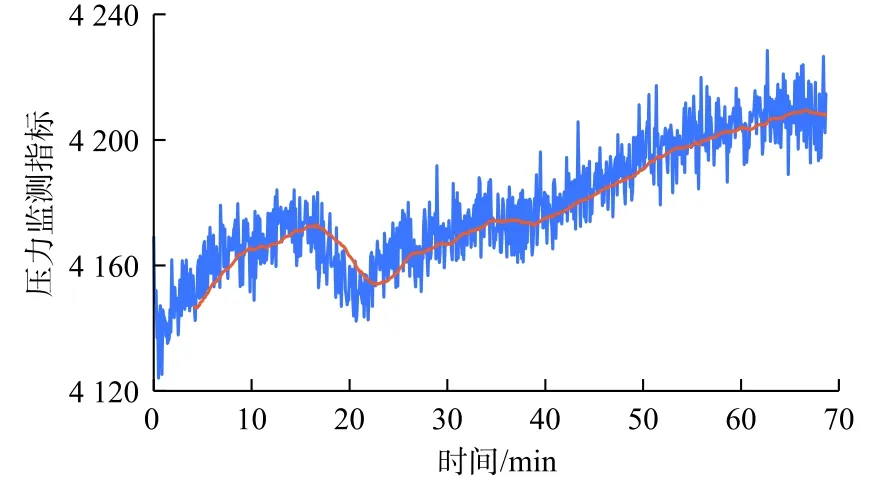
圖14壓力監(jiān)測(cè)指標(biāo)Fig.14 Pressure monitoring indicator

圖15井涌風(fēng)險(xiǎn)指數(shù)監(jiān)測(cè)Fig.15 Well kick risk index monitoring

圖16井涌監(jiān)測(cè)指標(biāo)的概率分析結(jié)果Fig.16 Probability analysis result of well kick monitoring indicator
僅基于傳統(tǒng)的井涌監(jiān)測(cè)指標(biāo)難以監(jiān)測(cè)到井涌事件。本文所提出的方法中引入的d指數(shù)監(jiān)測(cè)指標(biāo)顯示出了井涌發(fā)生時(shí)與正常趨勢(shì)的明顯偏差。此外,將所有信息整合到實(shí)時(shí)井涌風(fēng)險(xiǎn)指數(shù)中,為鉆井工程師提供了更加直接的井涌事件發(fā)生指南。
通過(guò)現(xiàn)場(chǎng)數(shù)據(jù)測(cè)試,發(fā)現(xiàn)d指數(shù)監(jiān)測(cè)指標(biāo)和壓力監(jiān)測(cè)指標(biāo)的性能在穩(wěn)健性和監(jiān)測(cè)速度方面通常優(yōu)于流量監(jiān)測(cè)指標(biāo),因?yàn)殂@井參數(shù)組合監(jiān)測(cè)指標(biāo)根據(jù)鉆頭測(cè)量的鉆井參數(shù)計(jì)算,壓力監(jiān)測(cè)指標(biāo)也利用井下數(shù)據(jù)計(jì)算得到,而流量監(jiān)測(cè)指標(biāo)根據(jù)在鉆臺(tái)上測(cè)得的流量參數(shù)計(jì)算得出,井涌總是需要時(shí)間來(lái)對(duì)鉆井液排出量產(chǎn)生影響,特別是對(duì)于海上鉆井平臺(tái)。當(dāng)泵關(guān)閉且鉆井液不循環(huán)時(shí),最小、最大和平均壓力會(huì)記錄在井下存儲(chǔ)器中,可用于壓力監(jiān)測(cè)指標(biāo)的計(jì)算。因?yàn)閐指數(shù)監(jiān)測(cè)指標(biāo)是基于鉆速和鉆壓異常的指標(biāo),所以它僅在鉆井過(guò)程中有效并且不能應(yīng)用于其他鉆井期(如循環(huán)、起下鉆)。故整個(gè)鉆井過(guò)程需要流量監(jiān)測(cè)指標(biāo)和壓力監(jiān)測(cè)指標(biāo)來(lái)提高d指數(shù)監(jiān)測(cè)指標(biāo)預(yù)測(cè)的可信度。
5 結(jié)論
(1)研究了一種實(shí)時(shí)智能鉆井監(jiān)測(cè)技術(shù)。該技術(shù)將動(dòng)態(tài)鉆井物理模型、人工智能和數(shù)據(jù)挖掘算法相結(jié)合,從實(shí)時(shí)井眼清潔及水力學(xué)監(jiān)測(cè)、實(shí)時(shí)卡鉆預(yù)測(cè)、實(shí)時(shí)井涌監(jiān)測(cè)3個(gè)方面對(duì)實(shí)時(shí)鉆井監(jiān)測(cè)及預(yù)警技術(shù)進(jìn)行了詳細(xì)分析,闡述了實(shí)時(shí)智能鉆井監(jiān)測(cè)技術(shù)實(shí)現(xiàn)方法。主要包括:動(dòng)態(tài)鉆井物理模型構(gòu)建方法及實(shí)現(xiàn)實(shí)時(shí)自我修正的智能化方法;多指標(biāo)、多角度的鉆井事故風(fēng)險(xiǎn)分析及預(yù)測(cè)方法;實(shí)時(shí)動(dòng)態(tài)鉆井?dāng)?shù)據(jù)的趨勢(shì)判斷與風(fēng)險(xiǎn)評(píng)估方法。
(2)該技術(shù)可以實(shí)時(shí)分析鉆井施工過(guò)程中的綜合錄井?dāng)?shù)據(jù),然后利用分析結(jié)果預(yù)測(cè)即將發(fā)生的復(fù)雜情況,可實(shí)現(xiàn)實(shí)時(shí)準(zhǔn)確呈現(xiàn)井下工況的功能。
(3)本模型無(wú)法進(jìn)行所有的卡鉆判別及預(yù)測(cè),提供卡鉆模型僅能監(jiān)測(cè)機(jī)械卡鉆。接下來(lái)的研究中將繼續(xù)補(bǔ)充完善。
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19