某型飛機重心測量方法誤差分析及優化
2020-06-12 07:12:06盧歡朱訓寧中國特種飛行器研究所
科海故事博覽 2020年1期
盧歡 朱訓寧 中國特種飛行器研究所
1 前言
飛機重量重心測定是對理論重量重心的驗證,是飛機首飛及交付前的一項重要地面試驗。測量結果的精度關系到飛行安全和飛機交付。然而,在對某型飛機空機實際重心測量中發現,飛機重心波動較大,有必要查明重心波動原因,優化測量方法,提高測量精度,以保障飛行安全。
本文通過對飛機重心測量方法的誤差進行分析,找到了主要的誤差源;基于誤差分析的結果,對飛機重心測量方法進行優化。
2 飛機重心測量方法
2.1 測量方法分析
《飛機設計手冊》推薦了兩種常用的測量方法:千斤頂法和機輪法。某型飛機采用機輪法進行重心的測量。
機輪法是將機輪放置在三個秤上(分別對應前輪和兩個主輪),第二種解析法[2]是將前輪抬高不同高度進行稱重作業(見圖1)。
在測量中,由于某型飛機縱向重心在主輪后方,所以要在前座椅處加配重保證平衡。
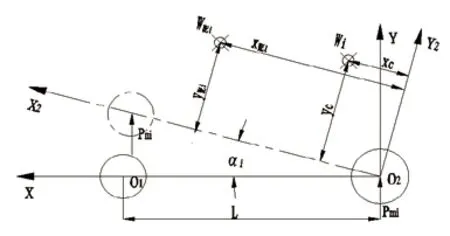
圖1 飛機稱重狀態受力示意圖
飛機姿態角為 αi、αi+1時,對O2求力矩:
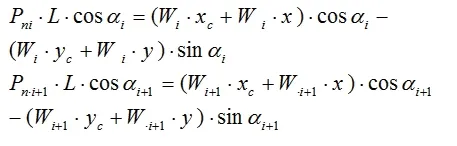
式中:W,空機重量;Pn,前稱凈重;αi,姿態角;W配,前座椅上配袋重量;x配,前座椅上配重重心x坐標;y配,前座椅上配重重心y坐標。
聯立以上兩式得到:
將yc代入第1式得xc值,將稱重坐標系下的重心坐標轉換成機身坐標系下的重心坐標。
xt=2.080-xcyt=-0.215+yc
2.2 測量結果分析
用機輪法對7架飛機進行重量重心測量(見圖2)。測量結果波動較大。尤其y 坐標測量值與理論設計值最大相差20%,不滿足精度要求。
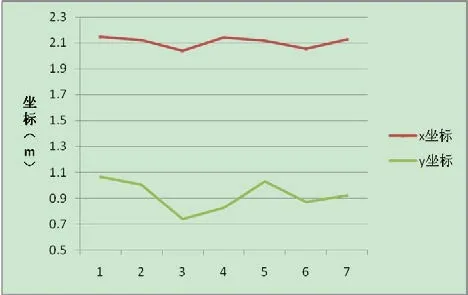
圖2 重心測量結果統計
3 誤差分析
3.1 誤差源分析
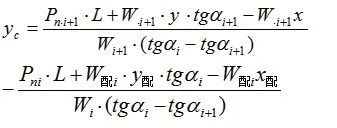
測量工具的精度和人為因素將會導致測量誤差。根據誤差傳播定律,重心yc的誤差為:
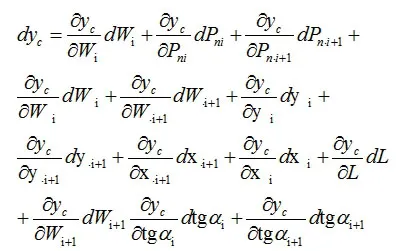
可知影響重心測量的誤差源主要包括飛機重量、配重重量、配重重心、俯仰角等測量誤差。和配重相關的有6項,占總項目數的46%。
3.2 某型飛機重心測量誤差分析
將測量數據代入重心yc的誤差計算式中,分析各誤差源的最大可能偏差。結果如下表1。
由表1中的誤差分析結果,可發現:
1)表中1、2兩項內容都是由前稱造成的誤差。經計算,前稱造成的誤差占總誤差的22%。
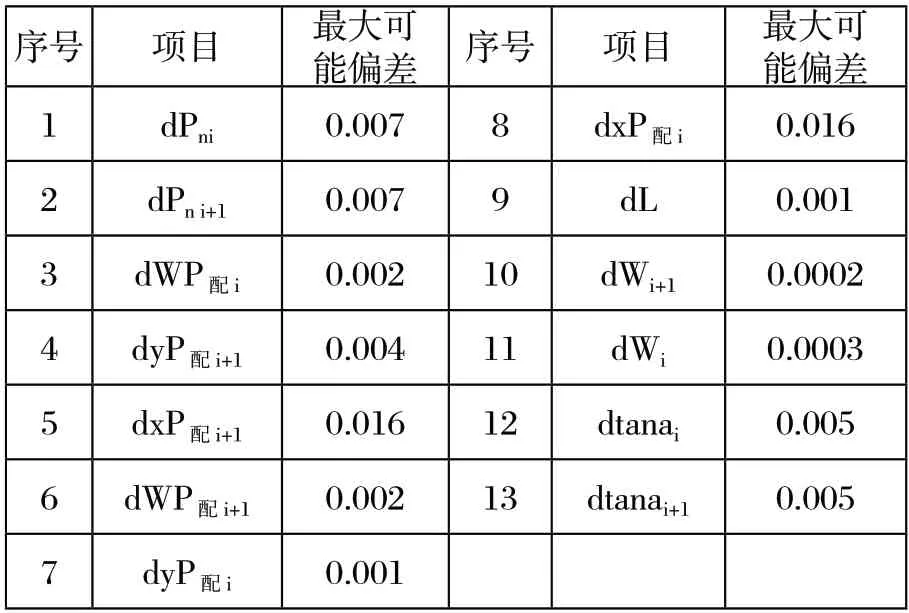
表1 最大可能誤差計算表
2)表中3~8項內容都是由于加入了配重產生的誤差,經計算,占總誤差的62%。其中,由于配重重心產生的誤差(4、5、7、8)占總誤差的55%。這是因為配重物為沙袋,每次需2~3個沙袋堆疊使用,存在較大的人為誤差。
3)表中12、13兩項內容都是飛機俯仰角測量值產生的誤差。經計算,由飛機俯仰角測量值產生的誤差占總誤差的14%。
4 測量方法優化
4.1 優化策略
根據以上分析可知,配重的引入是導致某型飛機空機重心測量誤差較大的主要原因,為此,考慮改變測量方式以取消配重。
以某飛機為例,其機體坐標系下的重心為(2.124,0.925)。若將飛機處于低頭狀態(見圖3),且保證OW 連線在OY 的左側,則W 在OXY 坐標系中的x 坐標大于0,飛機的重心在水平面的投影就在主輪和前輪的中間,稱重時無需配重。
根據計算,飛機需要低頭超過2.7°即可使重心在水平面的投影就在主輪和前輪的中間位置。根據飛機稱重的要求,兩個稱重狀態下飛機的俯仰角之差要大于5°[2],所以,可以將飛機處于2.7°和7.7°兩種低頭狀態下稱重。
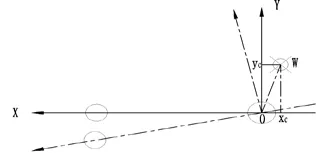
圖3 某型飛機低頭狀態示意
4.2 改進后的重心測量方法
改進后的飛機重心測量方法具體步驟如下:
1)根據飛機稱重方案檢查裝機狀態完整。
2)根據飛機機輪位置關系放置磅秤。
3)安排人員托住尾撬,保證飛機安全。
4)將飛機抬至磅秤上,按需要放置輪擋。
5)根據以往稱重重心計算出機頭應下沉的高度,參照該值調整飛機狀態,保證飛機平衡。
6)根據稱重方案測量并記錄相應數據。
7)繼續降低機頭位置,在滿足飛機安全性的前提下可以盡量拉大兩個稱重狀態俯仰角的差值,提高飛機稱重的精度。
8)根據飛機稱重方案計算飛機重量重心。
5 結論
1)配重是造成飛機重心測量誤差較大的主要原因,占總誤差的62%。使用兩個低頭狀態進行測量可以消除這個誤差,提高測量的精度。
2)前稱凈重對飛機重心測量精度也有較大影響,可以通過提高前稱精度來提高測量精度。
3)飛機俯仰角測量需先在飛機座艙底部標記四個測量點,建議在生產過程中即完成四個測量點的標記工作。
4)新的測量方法提高了測量精度,但是要求稱重操作人員注意人員和飛機安全。
猜你喜歡
環球時報(2022-05-30)2022-05-30 15:16:57
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年11期)2019-06-24 03:40:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年18期)2018-11-14 01:48:24
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
山東工業技術(2016年15期)2016-12-01 05:31:22
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
