汽車智能防撞系統(tǒng)
2020-06-11 00:36:00黃志芳宋世杰陳澤銳饒皆昌何梓杰甘海杰
物聯網技術 2020年5期
黃志芳 宋世杰 陳澤銳 饒皆昌 何梓杰 甘海杰
摘 要:汽車智能防撞系統(tǒng)通過車載傳感器,自動采集、分析和處理汽車周邊物體信息,當汽車與目標物體小于設定值時,提前啟動自動剎車系統(tǒng),可有效降低各類交通事故發(fā)生的概率。文中設計的汽車智能防撞系統(tǒng)采用STC12C5A60S2作為主控芯片,主要由前置剎車系統(tǒng)、后置剎車系統(tǒng)、反饋系統(tǒng)等構成。前后置剎車系統(tǒng)將測量數據傳輸至主控芯片進行處理,啟動防撞控制模塊工作,汽車剎車板下拉實現汽車智能防撞;反饋系統(tǒng)將反饋信號發(fā)送至主控芯片,剎車成功則語音播報已剎車,若是剎車失靈則播報提醒司機進行人為剎車。實驗結果表明,所設計系統(tǒng)成本低,安裝簡單,在現今汽車走入千家萬戶的背景下,有著非常廣闊的市場應用前景。
關鍵詞:智能汽車;自動剎車系統(tǒng);車載傳感器;反饋系統(tǒng);語音播報;智能防撞系統(tǒng)
中圖分類號:TP212.6;TN915文獻標識碼:A文章編號:2095-1302(2020)05-00-03
0 引 言
根據相關調查資料顯示,車禍在全國意外事故的總數占據首位,且我國每年有超過26萬人在交通事故中身亡。自動剎車防撞系統(tǒng)由于成本高昂,無法大規(guī)模推廣應用到普通家用轎車中。因此,研發(fā)一套適用性廣、價格適中、可靠性高的汽車智能防撞系統(tǒng)就顯得尤為重要和緊迫。本文設計的智能防撞系統(tǒng)在剎車失靈的緊急情況下通過聲光電的作用提醒駕駛員介入剎車,避免交通事故的發(fā)生。本系統(tǒng)所采用的模塊生產成本低、可移植性強、來源性廣,大大降低了系統(tǒng)的生產成本,有效地提高了系統(tǒng)的性價比,易于在全國各地推廣應用[1]。
本文通過對傳感器的綜合運用,對采集到的數據進行處理、分析得到相應的結論,驗證了所設計系統(tǒng)的安全性、可靠性和實用性。
1 系統(tǒng)的硬件結構
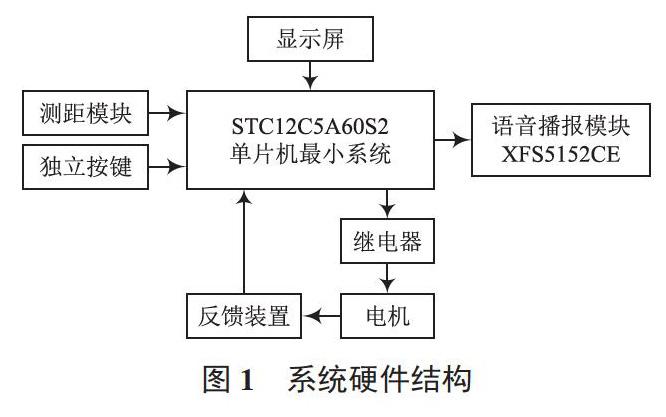
本系統(tǒng)硬件結構如圖1所示,以STC12C5A60S2微控制器作為核心,搭載顯示屏、獨立按鍵、XFS5152CE語音播報模塊、繼電器、電機和反饋裝置,測距系統(tǒng)包括激光和超聲波測距模塊等。
本文采用STC12C5A60S2微控制器,其片內集成了
60 KB程序FLASH、2通道PWM、16位定時器等資源,自帶軟件看門狗和系統(tǒng)調試功能(ISD),運行速度快,開發(fā)環(huán)境較易搭建,能滿足系統(tǒng)設計要求。
1.1 語音播報
語音播報模塊采用科大訊飛的XFS5152CE語音合成模塊。XFS5152CE的UART接口與微控制器可直接連接,接收來自微控制器的數據,根據數據處理結果播報相應語音提示[2]。
1.2 自動剎車功能
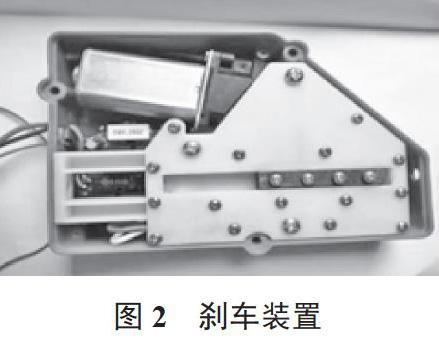
剎車裝置如圖2所示,固定于汽車底部。該裝置利用一根長度適中的鋼絲線,一端與汽車的剎車踏板連接,另一端與剎車裝置的空心鐵條相連,鐵條上有4顆平底螺絲釘用于固定鋼絲線,將空心鐵條固定在齒輪上,通過齒輪的轉動使空心鐵條左右移動,空心鐵條收緊固定的鋼絲線,使汽車剎車踏板下拉實現剎車[3]。
1.3 障礙物距離檢測
汽車在行駛過程中需時刻探測周邊障礙物,當汽車與障礙物之間的距離達到預置危險距離時,則需要減速或剎停汽車。汽車在行駛時,汽車周邊會有各種各樣的干擾,會使防撞系統(tǒng)誤觸,因此本文把智能防撞系統(tǒng)分為前置剎車系統(tǒng)和后置剎車系統(tǒng),兩個系統(tǒng)各自獨立工作。另外,設置一鍵開關,在緊急情況可關閉自動剎車系統(tǒng)。
1.3.1 前置剎車系統(tǒng)模塊
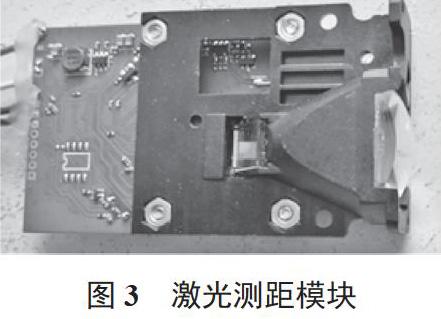
汽車在前進時,前車燈電路正常運行而后車燈不工作,所以前置剎車系統(tǒng)的核心控制板可以通過前車燈電路供電。前置剎車系統(tǒng)采用測距50 m的激光傳感器檢測與障礙物之間的距離,當距離達到預置距離時,自動剎車系統(tǒng)啟動,語音模塊播報相關信息。激光測距模塊如圖3所示[4]。
1.3.2 后置剎車系統(tǒng)
后置剎車系統(tǒng)核心板利用汽車后車燈供電,因為汽車在倒車時,速度較慢,所以采用檢測范圍極廣的4路一體化超聲波模塊檢測與障礙物之間的距離[5]。當汽車與障礙物之間距離為1 m時,先剎車再松開,減緩倒車速度并警示司機已到達危險距離;當汽車與障礙物之間的距離達到20 cm時,則自動剎停。后置剎車系統(tǒng)如圖4所示[6]。
1.4 按鍵調節(jié)功能
因為不同車輛的外觀、內部構造都存在一定的差異性,影響剎車距離的設置,所以本系統(tǒng)將剎車的危險距離通過顯示屏顯示,再通過按鍵對其數值進行調節(jié)[7],降低不同車輛間的性能差異[8]。
2 軟件設計與實現
2.1 激光距離檢測
激光傳感器通過發(fā)射激光,收集并處理從光脈沖發(fā)出到返回接收所經歷的時間,通過公式計算即可得到與障礙物目標的距離,最后將距離數據發(fā)送給控制芯片。激光測距流程如圖5所示[9]。
2.2 超聲波距離檢測
超聲波模塊通過定時器計算超聲波發(fā)出和返回的時間,通過公式計算得到障礙物與后車尾之間的距離,4路超聲波通過互相比較得出與汽車最近障礙物的距離,此距離就是超聲波測距的最終結果。超聲波測距流程如圖6所示[10]。
2.3 自動剎車
汽車在前進和倒車過程中,激光和超聲波分別將檢測到的距離傳輸給各自的微控制器,單片機接收數據后對其進行處理,判斷是否啟動自動剎車系統(tǒng)。自動剎車流程如圖7所示。
3 實驗結果
本系統(tǒng)采用帶有剎車踏板的模型車進行試驗,實物圖如圖8所示。通過測試汽車智能防撞系統(tǒng)在行進狀態(tài)和倒車狀態(tài)下,自動剎車功能正常啟動,前后障礙物距離檢測誤差2~5 cm,汽車剎車時與障礙物之間的距離誤差10 cm,系統(tǒng)響應時間約1 s。
4 結 語
配備智能防撞系統(tǒng)已成為汽車的發(fā)展趨勢,然而我國的汽車保有量龐大,現有汽車配置汽車與智能防撞系統(tǒng)一體化需要資金成本高,若沒有可拆卸的智能防撞系統(tǒng),大量的舊車將會被淘汰。本文研究開發(fā)的汽車智能防撞系統(tǒng)可解決此類問題,該系統(tǒng)可安裝于市面上絕大部分的汽車,具有可移植性高、成本低、可靠性高等優(yōu)點,可節(jié)約大量資源成本。
本文方案還有進一步的優(yōu)化空間,改善方向大致如下:
(1)加快系統(tǒng)的響應時間,降低剎車的距離誤差;
(2)增大前置剎車系統(tǒng)掃描范圍,減少系統(tǒng)盲區(qū);
(3)增加汽車測速功能,根據不同的速度自動調節(jié)剎車的危險距離;
(4)根據汽車與障礙物之間的距離,控制汽車在一定速度范圍內行駛,防止突發(fā)情況時,系統(tǒng)響應不及時。
參考文獻
[1]鮑偉亮,張曉壯,吳軻,等.車輛防追尾預警剎車系統(tǒng)的設計探討[J].農機使用與維修,2019(3):1-3.
[2]伍森.基于XFS5152CE的CAN總線聲光報警系統(tǒng)設計[J].電子世界,2017(11):198-199.
[3]王文學.機動車防碰撞的自動剎車裝置探討[J].今日科苑,2011(6):162-163.
[4]顏慧佳.基于激光測距的智慧停車管理系統(tǒng)研究與設計[J].激光雜志,2019,40(8):150-154.
[5]張彬彬.基于STM32的多通道超聲波測距系統(tǒng)設計[J].電子制作,2019(19):84-85.
[6]薛晶晶,周旭,董宇欣,等.基于STC89C52的超聲波導盲系統(tǒng)設計[J].物聯網技術,2019,9(9):70-73.
[7]曹曉龍.基于51單片機的按鍵識別實驗內容設計[J].課程教育研究,2019(19):223.
[8]解文軍.也談提高單片機按鍵軟件可靠性的方法[N].電子報,2019-02-17(9).
[9]徐恒梅.激光測距系統(tǒng)的設計研究[D].哈爾濱:哈爾濱工程大學,2010.
[10]董云峰,董迎霞.基于單片機的倒車雷達系統(tǒng)設計[J].大慶師范學院學報,2019,39(3):47-50.
