基于STC89C52單片機的汽車倒車防撞警報系統
2020-06-11 09:26:20呂淑芳
電子技術與軟件工程 2020年1期
文/呂淑芳
(山西農業大學信息學院 山西省晉中市 030800)
隨著科學技術的迅猛發展,經濟實力的不斷增強,人民生活質量的不斷提高,無論是個人用車,還是交通運輸車輛的出行安全成為了人們最為關注的問題,尤其是倒車盲區造成的隱患,基于STC89C52 單片機的汽車倒車防撞警報系統應運而生。該系統的開發旨在幫助駕駛員在倒車過程中解決視角盲區的缺陷,提醒駕駛員泊車倒車過程中做出合理的操作,避免駕駛過程中發生不必要的意外和傷害,讓整個泊車或倒車的過程更加的安全高效,從而提高駕駛的安全系數。
該系統利用靈敏的超聲波傳感檢測設備及時準確的探測到汽車倒車過程中車尾周圍的障礙物或行人,并立即反饋給車內微型處理系統——C52 單片機,單片機再通過精確的算法運算比較之后迅速做出判斷,如果達到危險范圍,系統將以語音燈光等信息及時提醒駕駛者以及周邊的行人,給駕駛員留出充足的處理該情況的操作時間以達到減少交通事故發生概率的目的。
1 系統介紹
本文設計的汽車倒車防撞警報系統包括超聲波模塊、單片機模塊、驅動模塊、顯示模塊,實現了報警功能、避障功能、測距功能、顯示功能。超聲波測距模塊會不停的向主控模塊反饋實時的測量數據,而這些數據會反映在LED 顯示模塊中,使用戶監控汽車與障礙物的距離,以減少倒車碰撞的可能。顯示模塊通過顯示功能顯示車尾與障礙物之間的距離數值并適時的發出警報聲,當測量數值大于預設警報間距數值時,蜂鳴器會發出警報聲以達到防止事故發生的目的。
2 系統硬件設計
本課題設計采用C52 單片機作為主控制器來實現倒車防撞預警系統的實現,為了防止汽車碰到前方或是左右方向的障礙物,在汽車的車頭裝載了超聲波傳感器,利用超聲波測距的原理監測障礙物與汽車車尾之間的距離,當達到或超出預設間距警報數值時,蜂鳴器就會發警報聲同時配以相應的圖像信息提醒駕駛員的下一步行車操作。
系統總體的設計框圖,如圖1 所示。
2.1 車體設計
本系統使用兩驅車模作為汽車的車體,車體設計采用車體前方兩個普通車輪,車體后方則使用一個方向輪。車體前方的兩個普通車輪使用兩個電機分別驅動,這兩個電機具有相同的力矩和轉速,而后面的方向輪則是為了方便實現汽車的原地旋轉。兩個電機分別驅動車體前方的兩個車輪進行反向旋轉,從而帶動后面的方向輪進行原地的直角甚至掉頭動作。
2.2 主控制器模塊設計
本系統使用STC89C52 單片機作為汽車的主要控制器。STC89C52 是一種低功耗、高性能CMOS8 位微控制器,具有8K字節系統可編程Flash 存儲器。該單片機使用經典的MCS-51 內核,但是做了很多的改進使得芯片具有傳統51 單片機不具備的功能。在單芯片上,擁有靈巧的8 位CPU 和在系統可編程Flash,使得STC89C52 為眾多嵌入式控制應用系統提供高靈活、超有效的解決方案。
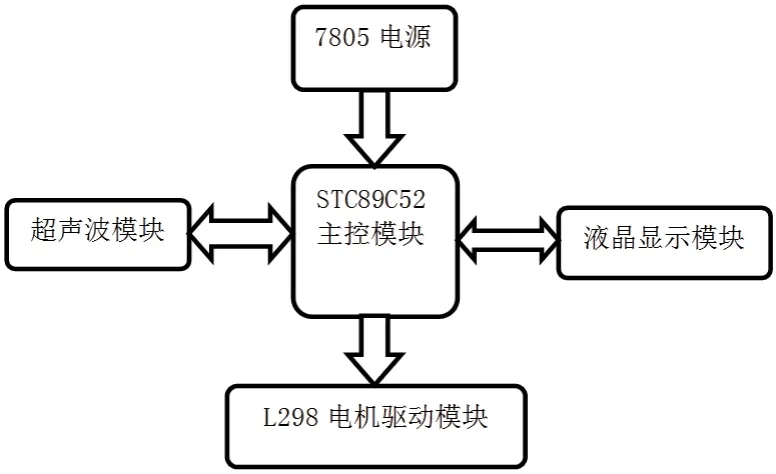
圖1:系統總體設計框圖

圖2:主控電路圖
本系統的主控電路圖如圖2 所示。
2.3 電源模塊設計
綜合考慮電流驅動能力、電壓輸出的穩定性、蓄電池體積的大小等因素,本系統使用每節1.5V 的6 節電池作為汽車的電源。經過汽車工作的反復驗證,電壓穩定符合系統要求。
2.4 電機驅動模塊設計
考慮到電路設計按鍵開關對汽車速度的影響、響應時間的長短、可靠性、壽命等因素,本系統采用具有三極管功率放大器的直流電機,它是一種結構和原理都較為簡單的達林頓管組成的H 型橋式電路,加速能力比較強。電路圖如圖3 所示。本系統使用L289N芯片作為電機驅動,這種芯片是一種高電壓大電流的全橋芯片,一片即可控制兩個電機。而且這種芯片比較普及,市場上有很多。用這個芯片作為電機驅動,不僅操作性好,穩定性能也頗為優良。
2.5 電機模塊設計
汽車倒車防撞警報系統最主要的是實現避障功能,因此驅動汽車前進或是后退、轉彎的驅動電機的選擇就變得至關重要。考慮到輸出力矩高低、轉速的穩定性對汽車前進、后退、轉彎的影響,本系統使用直流減速電機作為汽車的驅動電機。直流減速電機由于它內部具有高速電動機,可以給汽車提供原始動力,具有力矩較大,體積較小等優點。驅動電路圖如圖4 所示。
3 系統主要模塊
3.1 超聲波測距模塊
對比分析了激光測距方式、紅外線測距、毫米波測距、超聲波測距,根據本系統開發的特點,選擇了超聲波測距。超聲波測距方式相對于其他幾種測距方式在短距離測距方面的優勢是顯而易見的,并且成本低廉,適應能力強。
超聲波的傳播速度比光速小很多,易實現信號的定向發射與接收,本系統汽車的超聲波測距功能是由HC-RS04 超聲波測距模塊提供的,它能夠完成2cm-400cm 內的監測功能。整個測距模塊在調試之后可以實現3mm 左右的測量精度,從而實現避障功能。
在程序運行時,主程序先讀出并處理HC-RS04 的測量的間距數值。當距離小于等于既定值時,汽車就會停止并轉向再進行測距重復判斷,直至距離大于既定值。當距離大于既定值時,汽車則會一直向前。
3.2 單片機模塊
STC89C52 是一款價格實惠,各方面性能均衡的的單片機。由于C52 抗干擾、可編程、高速、低功耗等一系列的優點,適合本系統開發應用。
3.3 驅動模塊
P0.0,P0.1,P0.2,P0.3 分別通過LG9110 機驅動來控制電機1 和電機2。通過電機的正轉和反轉來完成汽車的前進,停止。
3.4 顯示模塊
該顯示模塊主要由一個共陰極四位一體七段LED數碼管構成,這七段數碼管可以分別用a、b、c、d、e、f、g 和dp 來表示。他們相互連接用于接收C52 的P1 口發出的顯示段碼信號。在程序運行時,超聲波測距模塊會不停的向主控模塊反饋實時的測量數據,而這些數據會反映在LED 顯示模塊中,使用戶監控汽車與障礙物的距離,以減少倒車碰撞的可能。
4 系統實現
4.1 主程序
主程序初始化后,先調用顯示子程序,判斷汽車車尾周圍是否有障礙物的存在,如果有障礙物存在,主程序則先讀出并處理HCRS04 的測量的間距數值。判斷測量數值與預設的警報間距數值大小,當測量數值大于預設警報間距數值時,蜂鳴器就會發出警報聲以達到防止事故發生的目的。
4.2 顯示數據子程序
該程序的作用是當發現有障礙物存在時,通過超聲波模塊進行測距,測量后的數值傳送給C52 單片機處理,C52 運算完成之后,再把運算的數值顯示在數碼管上,供駕駛員實時觀測并做出合理的倒車操作。
4.3 報警子程序
該程序的作用是通過顯示子程序獲得障礙物與車尾實際間距數值,該值大于預設警報間距值時,使蜂鳴器發出警報,做出的合理的判斷操作,提醒汽車周圍的行人,或者提醒駕駛員,以便駕駛員有足夠的反應調整時間,從而達到避免事故發生的目的。
4.4 按鍵子程序
按鍵子程序的作用是使有效間距可調節,駕駛員可根據自己的需求調整自己需要的報警距離,按鍵首次被按下時為調整上限,按鍵連續二次按下是用于調整下限,連續按下三次功能退出。
5 結束語
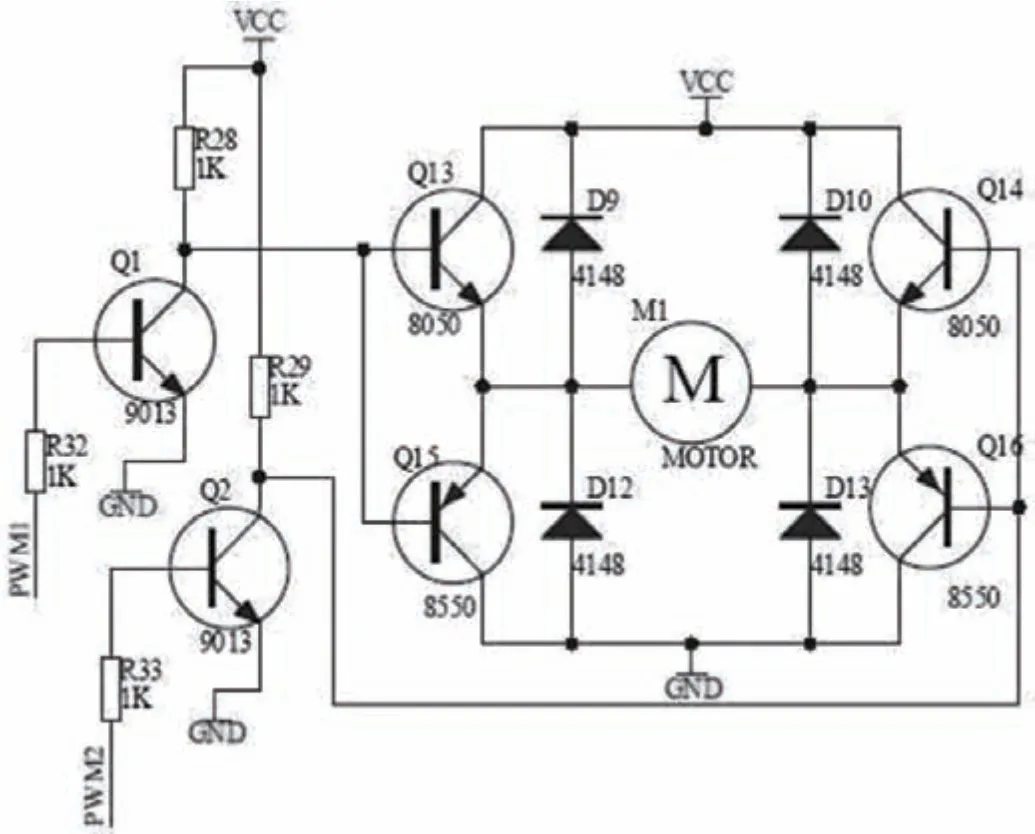
圖3:H 橋式電路圖
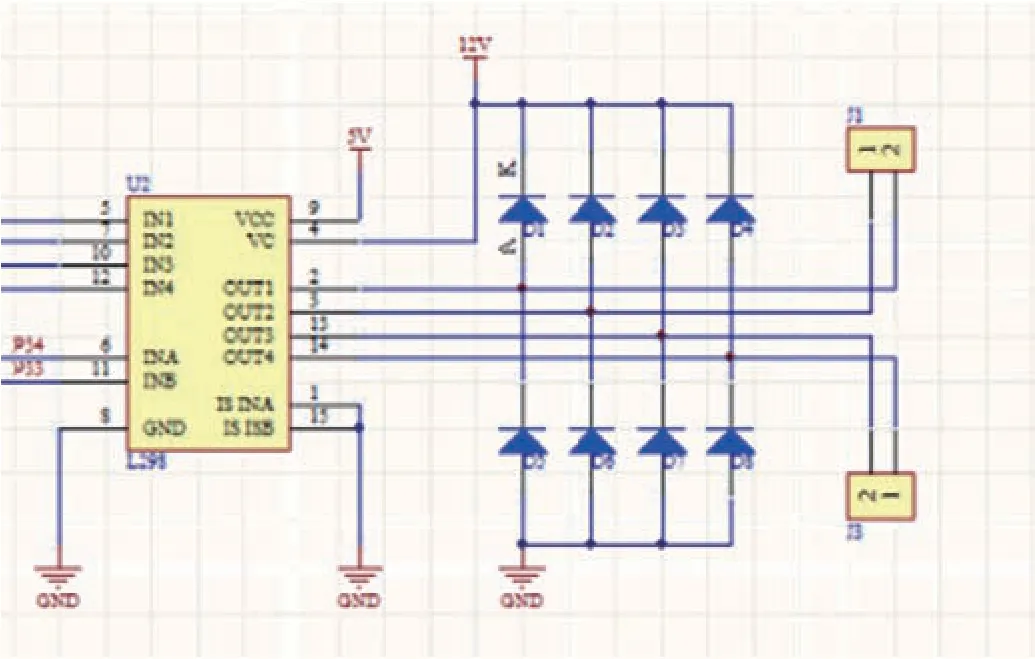
圖4:驅動電路圖
基于STC89C52 單片機的汽車倒車防撞警報系統將嵌入式應用技術與物聯網理論相結合,利用靈敏的超聲波傳感檢測設備及時準確的探測到汽車倒車過程中車尾周圍的障礙物或行人,并立即反饋給車內微型處理系統——C52 單片機,單片機再通過精確的算法運算比較之后迅速做出判斷,如果達到危險范圍,系統將以語音燈光等信息及時提醒駕駛者以及周邊的行人,給駕駛員留出充足的處理該情況的操作時間,大大降低了交通事故發生概率,為人們的安全出行保駕護航。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
電子設計工程(2015年15期)2015-02-27 12:07:30