基于阿里云平臺的輸電線路弧垂監控系統
2020-06-10 07:41:06李捍平徐健叢赟李小炳
電子技術與軟件工程 2020年4期
關鍵詞:測量
李捍平 徐健 叢赟 李小炳
(國網浙江省電力公司舟山建設分公司 浙江省舟山市 316000)
1 引言
目前,在輸電線路建設中架線施工是關鍵的工序之一,而電線高度檢測裝備則是張力架線施工的關鍵設備,架空輸電線路的弧垂高度以及位置安全施工的重要指標之一,此外,輸電線路的受力負荷和施工環境條件都會造成弧垂高度的改變。一方面,弧垂高度過低會造成重大安全事故,尤其是在交叉跨越、人煙密集和大跨越地段,另一方面,高度過高則會使電線承受過大的張力,同時給施工帶來諸多難度。
基于上述需求,相關人員進行了深入研究,國內外電力科研及運行單位對架空輸電線路弧垂在線監測和牽張機牽引力自動控制的研究已進行了多年,提出了實際有效的監測方法,但仍然存在下述主要問題:
(1)目前方法的測量過程較為繁瑣,且由于傳感器檢測裝置的缺陷和測量結果數據的處理較為復雜,導致弧垂結果精度較低往往無法達到較高的精度;
(2)現有方法僅僅考慮了弧垂高度的測量,忽略了弧垂定位的測量,這會導致安全隱患的發生;
(3)沒有通過實時在線檢測牽引繩的牽引力和架空輸電線路的弧垂高度、弧垂定位等數據來可靠地控制牽張機工作在安全狀態,容易造成安全事故。
2 基于UWB技術的弧垂測量原理
UWB測距方法分為接收信號強度法(RSSI)和到達時間法(TOA)兩種,其中,RSSI精度低,僅限于粗糙測距,本論文將采用精度較高的TOA,TOA又包括雙程測距(TWR)和單程測距(OWR),TWR適用于監測裝置間沒有公共時鐘的情況,而OWR在監測裝置間有公共時鐘的情況下使用。
OWR的測距原理是由基于UWB波的傳輸時間差來決定,假設A為參考監測裝置,B為目標監測裝置,現測量A、B監測裝置之間的距離。在測距前對監測裝置A、B進行同步檢測和同步調整,監測裝置A在T0時刻發送信號給監測裝置B,監測裝置B在T1時刻收到信號,則監測裝置A、B間的距離dAB可以由下式得到:

式中c為UWB的傳播速度,TAB為UWB 波在A、B之間的傳播時間,TAB可由下列公式求得:

基于UWB波之OWR測距技術的電力線弧垂測量原理如圖1所示,y為架空輸電線路弧垂距離地面的垂直高度,x為架空輸電線路弧垂距離固定UWB測距裝置A之間的平行地面距離,也就是弧垂的定位距離,c為固定UWB測距裝置A和固定UWB測距裝置B之間的距離,a為垂點和固定UWB測距裝置A之間的距離,b為垂點和固定UWB測距裝置B之間的距離,θ1為垂點和固定UWB測距裝置A連線對地面形成的夾角,θ2為垂點和固定UWB測距裝置B連線對地面形成的夾角。
電力線弧垂定位和弧垂高度可按如下方程組求得:


圖1:基于UWB波的電力線弧垂測量示意圖
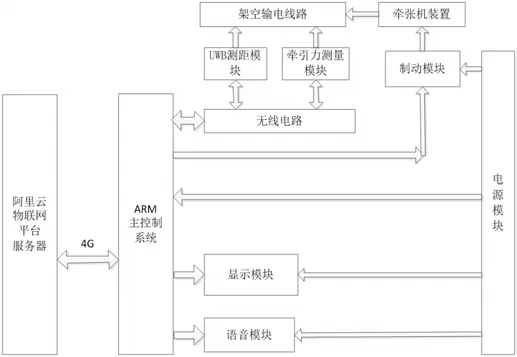
圖2:基于UWB波的電力線弧垂測量裝置結構圖
3 基于UWB技術弧垂測量系統的具體實現
為實現上述測量原理,論文設計了如圖2所示的弧垂在線監測系統,該系統包括UWB滑動測距模塊(1)、UWB固定測距模塊(2)、牽引力測量模塊(3)、顯示模塊(4)、語音模塊(5)、制動模塊(6)、控制主系統(7)和電源模塊(8)。其中,模塊(8)分別向模塊(4)、模塊(5)、模塊(6)、模塊(7)連接供電;模塊(7)分別和模塊(1)、模塊(2)、模塊(3)連接并雙向傳輸數據;模塊(7)分別連接模塊(4)、模塊(5)、模塊(6)并向這些模塊單向傳輸控制命令和控制數據。
控制主系統與阿里云物聯網平臺服務器通過無線連接,并在控制主系統內部設置有GPS模塊、數據存儲模塊和數據處理模塊和無線電路模塊,GPS模塊用于定位施工人員的地理位置信息并向平臺服務器傳輸該位置信息數據,數據存儲模塊存有牽張機安全工作狀態的數據信息,數據處理模塊用于通過所述牽引力測量模塊(3)計算牽引繩的牽引力大小,數據處理模塊還用于通過所述UWB滑動測距模塊(1)和UWB固定測距模塊(2)計算架空輸電線路的弧垂高度和弧垂定位,數據處理模塊還用于實時比對牽張機的當前時刻工作狀態從而通過制動模塊(6)調節牽張機的下一時刻工作在安全狀態,無線電路模塊用于連接模塊(1)、模塊(2)和模塊(3)實現雙向數據傳輸。

圖3:基于阿里云平臺的電力線弧垂物聯網實時監控系統截圖
UWB滑動測距模塊(1)和UWB固定測距模塊(2)是基于UWB原理的相同測距電路單元,包括UWB信號接受電路、UWB信號發射電路、無線電路和供電干電池。
牽引力測量模塊(3)包括基于金屬應變片的電橋測量電路、模數轉換電路和供電干電池,金屬應變片粘貼在連接電線的牽引繩一端,牽引力的大小改變帶動牽引繩端和應變片一起發生相同程度的形變,電橋測量電路將應變片的形變轉換為電橋輸出電壓大小的改變,模數轉換電路將電橋輸出電壓轉換為數據并傳給控制主系統(7)。
顯示模塊(4)基于LCD顯示原理,實時顯示弧垂高度、弧垂定位和牽張機工作狀態等信息數據。語音模塊(5)為語音輸出揚聲器電路。制動模塊(6)包括電子開關和數模轉換電路,電子開關接受控制主系統(7)的輸出控制命令并執行相應的動作,數模轉換電路接受控制主系統(7)的輸出控制數據并相應地改變牽張機的下一時刻工作狀態。
4 基于UWB電力線弧垂測量的阿里云物聯網平臺的實現
阿里云物聯網(IoT)是阿里巴巴集團推出的專業物聯網服務平臺,提供云管邊端等基礎產品接入及技術賦能、行業解決方案合作與實施、軟硬件銷售、營銷推廣、需求對接等快速商業變現通道,全方位對接物聯網產業上億商機。物聯網平臺提供安全可靠的設備連接通信能力,支持設備數據采集上云,規則引擎流轉數據和云端數據下發設備端。此外,也提供方便快捷的設備管理能力,支持物模型定義,數據結構化存儲,和遠程調試、監控、運維。阿里云物聯網平臺為設備提供安全可靠的連接通信能力,向下連接海量設備,支撐設備數據采集上云;向上提供云端API,服務端通過調用云端API將指令下發至設備端,實現遠程控制。物聯網平臺也提供了其他增值能力,如設備管理、規則引擎、數據分析、邊緣計算等,為各類IoT場景和行業開發者賦能。
阿里云物聯網平臺的創建具體包括三步:物聯網平臺登入、創建產品、設備、Topic類, MQTT.fx安裝及操作和上行消息、下行消息、消息內容查詢。其中每一步阿里云官方都有詳細的指導文檔和示例。論文創建的電力線弧垂阿里云物聯網平臺的截圖如圖3所示,該平臺能夠實現和本地電力線弧垂測量裝置實時的數據上傳、預警高度值下發以及物聯網端對本地測量裝置聲光報警器的開關控制,經過12小時的連續不間斷測試和為期兩個月的使用測試,沒有任何故障發生,性能穩定。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
