正三棱柱體在低雷諾數下流動特性的實驗研究
2020-06-08 10:54:50邱玥
工業技術創新 2020年2期
邱玥
(廈門大學嘉庚學院機電工程學院,福建漳州 363105)
引言
鈍體繞流是一種非常普遍的流體力學現象,在交通、建筑以及海洋工程等領域中有廣泛的應用[1-2]。鈍體繞流往往伴隨著流動分離以及渦街的形成、脫落,使鈍體表面產生交變應力,從而引起物體振動。當渦的脫落頻率接近物體的固有頻率時,還會引起共振,造成物體結構的直接破壞[2]。對鈍體繞流進行研究,有助于深入了解流動分離、尾渦脫落和能量轉化等特性[3],對掌握流場工況以及減阻機理具有極其重要的工程意義。
流體力學的研究方法主要包括理論分析、實驗測量和數值模擬[4-5]。然而目前鈍體繞流研究大多基于理論分析和有限元數值模擬[6-7],缺乏具體的實驗測量以及實驗驗證。尤其是對于正三棱柱體模型,針對低雷諾數工況下尾渦形成長度與速度場隨雷諾數變化情況的研究相對缺乏。因此,本文通過實驗測量以及實驗驗證,對正三棱柱體尾流形成過程進行研究,重點分析正三棱柱體柱面對來流時尾渦的形成機制,探討尾渦形成長度、阻力系數等流場特征參數與雷諾數之間的關系。
1 實驗模型
本文所涉及的實驗測量工作均在廈門大學流體&PIV實驗室中的開放循環水槽中進行[5,8]。實驗主要研究正三棱柱體柱面對來流方向的不同來流工況。實驗選用的模型為未來8000樹脂實心柱體,長480 mm,處于上下兩端板之間的測試區域長度=450 mm,長細比=37.5,其中為正三棱柱體截面底邊長度。柱體加工完成后,對其表面進行打蠟處理,減弱柱體壁面激光反射,從而增強對柱體壁面流場信息的捕捉。
2 流動顯示及流動狀態分析
2.1 基于氫氣泡示蹤法的流動顯示
流動顯示是進行流體力學研究最基本的實驗方法,可以在短時間內直觀地提供流場的全部信息,并且不會對流場產生干擾。常規的流動顯示方法包括壁面顯跡法、絲線法、示蹤法和光學法[9-10]。隨著現代光學、先進攝影裝置和計算機圖像處理技術的迅速發展,流動顯示方法得到了很大改進,被更廣泛地用于流體力學的研究[10]。本文采用的流動顯示方法是氫氣泡示蹤法。
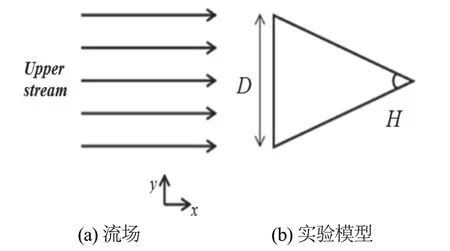
圖1 實驗模型與流場示意圖
選取直徑為200 μm的鉑絲作為陰極,與氫氣泡發生器相連,氣泡大小以及氣泡量均可調。在氫氣泡示蹤法中,需要抑制氫氣泡的漂浮以及擴散。采用較細的鉑絲可以產生較小的氫氣泡,從而有效地抑制氫氣泡的漂浮。氣泡量的多少與氫氣泡發生器電壓密切相關。電壓較低時,氣泡量不足,流動顯示效果不佳;若采用較高電壓,氫氣泡的漂浮以及擴散情況加劇,流動顯示細節難以觀測[11]。經過大量的嘗試,最終選擇50 V的直流電壓用于電解水產生氫氣泡,實驗工況下氫氣泡漂浮以及擴散情況較好,流動顯示較清晰。
2.2 流動狀態分析
流體經過正三棱柱體(柱面對來流)時會產生流動分離,流動分離位置在正三棱柱體底邊附近。流體流經正三棱柱體底邊之后,壓力遞增,流速遞減,相應區域稱為逆壓區。由于壓力與粘性阻力的共同作用,流體動能越來越小。當流體到達某點時,近壁處流體質點動能已被消耗殆盡,不能繼續向前運動,于是一部分流體質點在該點停滯下來,流速為零,但壓力較上游更大。由于流體不可壓縮,后繼流體質點因該點處的高壓而不可接近,被迫脫離壁面和原來的流向,向下游流去。這種邊界層脫落壁面的現象稱為邊界層分離,該點稱為流動分離點,以下簡稱分離點[12-14]。
利用高倍相機拍攝得到的流動狀態圖像如圖2所示。通過圖像可以得到不同工況下分離點的位置,分析發現不同工況下的分離點都在底邊頂點處,位置未發生變化。流體到達分離點以前流動較為平穩,近似層流,跡線連續性較好,此時流動速度快且速度脈動較小;流體到達在分離點之后,跡線較短,連續性較差,表明此時尾跡流動速度慢,并且伴隨著較大的速度脈動。通過流動狀態圖像可以很清晰地看到正三棱柱體尾跡區有卡門渦街形成。并且,隨著雷諾數的增大,尾渦形成長度呈現先增大后減小的趨勢,其中當Re=800時,尾渦形成長度取得最大值。
3 定量分析及測量
3.1 采用渦量準則探究尾渦脫落機制
旋渦強烈運動時所形成的渦旋結構往往是流動形態的主導因素,因而流場中渦旋結構的分析對流動特性研究極其重要。雖然PIV測得的瞬時速度場中包含著豐富的渦系,但是僅靠原始速度場并不能精確地獲取這些渦系的形態信息,必須進一步識別。目前旋渦識別的方法有很多,包括渦量準則、Q準則、Δ準則、準則、λ2準則等。本文采用渦量準則進行漩渦識別。
渦量的大小獨立于參考系,相比PIV測得的速度場,渦量場能反映更多的流動現象,特別是高度旋轉流動現象,比如湍流邊界層、尾跡渦和復雜渦流等。渦量的計算表達式為[15-18]

渦旋從正三棱柱體背面周期性脫落時會引起大尺度動量交換,因此選取雷諾應力集中的一點作為監測點,如圖3所示。
以Re=200的工況為例,分析正三棱柱體尾流區域雷諾應力集中點處的法向速度脈動,如圖4所示。由圖4得出,流場法向速度脈動近似于正弦曲線,呈周期性變化。從中取出一個周期內五個不同時間點a~e,得到一個周期內的渦旋結構演化,如圖5所示。由圖5可以看出一個周期內尾渦的形成發展和耗散過程。a時刻,上側的渦即將從正三棱柱體底邊脫落;而下側的渦正在形成,渦附近的流動速度明顯大于周圍流場。b時刻,上側的渦已經脫落;下側的渦已具備基本形態,渦中心渦量最大。c時刻,上側新的渦正在形成;下側渦被拉長,從正三棱柱體底邊到渦中心的深色區域已經不連續,渦正在隨著來流的發展從正三棱柱體脫落。d時刻,上側形成新的渦,下側渦基本脫落。e時刻,上側渦被拉長脫落,下側又有新的渦即將形成,一個周期整體完成。
觀察圖5還可發現,在流體繞過正三棱柱體表面時,正三棱柱體兩側會周期性地脫落出旋轉方向相反、排列規則的雙列線渦,它們經過非線性作用后,形成卡門渦街。渦量集中的區域主要分布于三棱柱的上下兩側,強度相近。根據灰度可判斷出兩個區域的渦矢量方向相反,上側的為負值,下側的為正值。這兩個位置可以看作尾流和主流的分界區域,存在較大速度梯度。
3.2 定常特性分析

圖2 不同雷諾數下的流動狀態
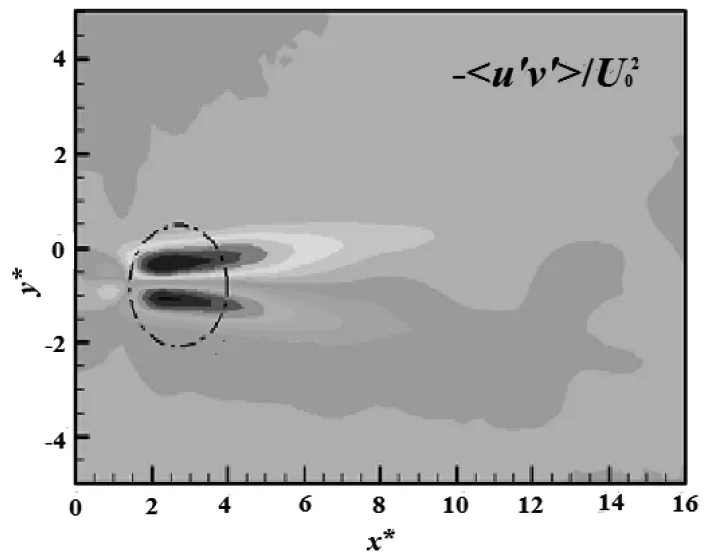
圖3 流動速度監測點設置示意圖
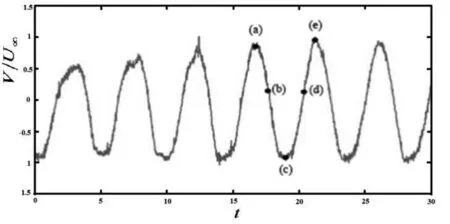
圖4 Re=200時雷諾應力集中點的法向速度脈動
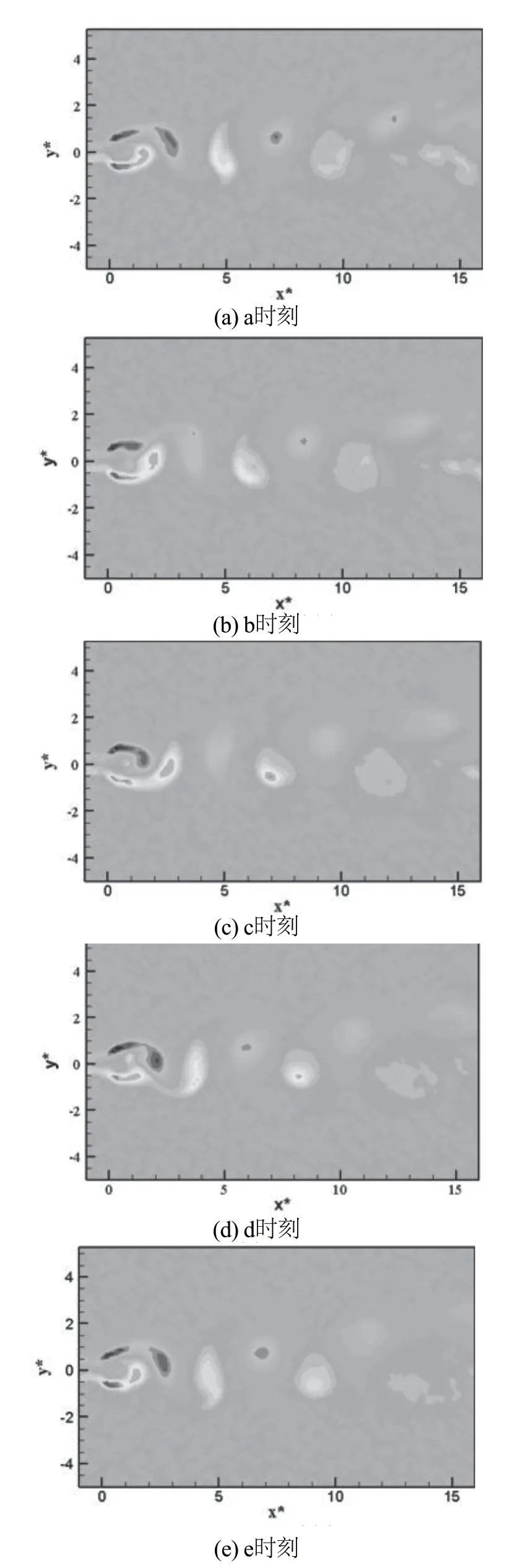
圖5 一個周期內渦旋結構演化圖
為了進一步研究正三棱柱體尾流場的基本特性,對由PIV測得的瞬時速度場進行處理,對各雷諾數下尾流場進行定常特性分析。

在同一標度下,做出不同雷諾數下正三棱柱體柱面對來流的時均速度分布云圖,如圖6所示。由圖6可知,在回流區域的上下兩側,存在沿尾跡中心線(即正三棱柱體中心線)近似對稱分布的高流速區域,該區域由流經正三棱柱面的流體在底邊棱角處分離時與自由剪切層發生較強動量交換所致。正三棱柱體尾跡區整體隨尾跡中心線呈近似對稱分布,在尾跡區遠端(遠離正三棱柱體),橫向時均速度明顯低于自由來流速度,這種速度虧損的程度直接與作用于正三棱柱體上的阻力有關。
由圖6還可得,正三棱柱體近尾跡區存在明顯的回流區域,該區域尺寸可由流向時均速度場=0的等值線確定,尾跡中心線速度與流向時均速度=0的等值線所交匯的點與棱角所在點橫向坐標的差值即為尾渦形成長度,用表示。因此,得到不同雷諾數下的尾渦形成長度,如圖7所示。結果顯示,正三棱柱體尾渦形成長度隨著雷諾數的增大,整體呈現先增大后減小的趨勢,當Re=800時尾渦形成長度取得最大值,Re=200時尾渦形成長度最小。
3.3 阻力系數分析
由正三棱柱體繞流阻力系數計算公式

得到不同雷諾數下的阻力系數大小,如表1所示。式(4)中,Cd為阻力系數,D 為正三棱柱體截面底邊長度,為來流速度,U 為合速度,u、v分別為x、y方向速度分量。
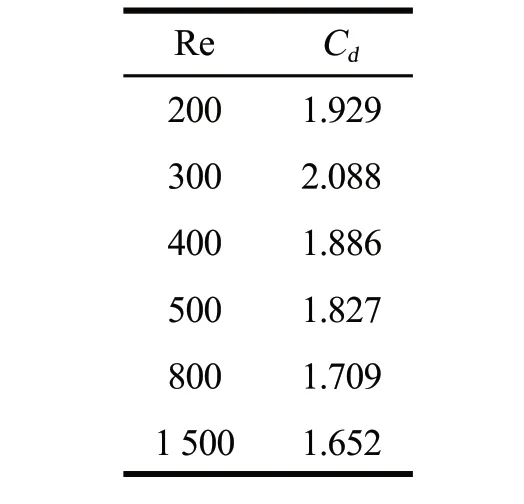
表1 不同雷諾數下的阻力系數大小
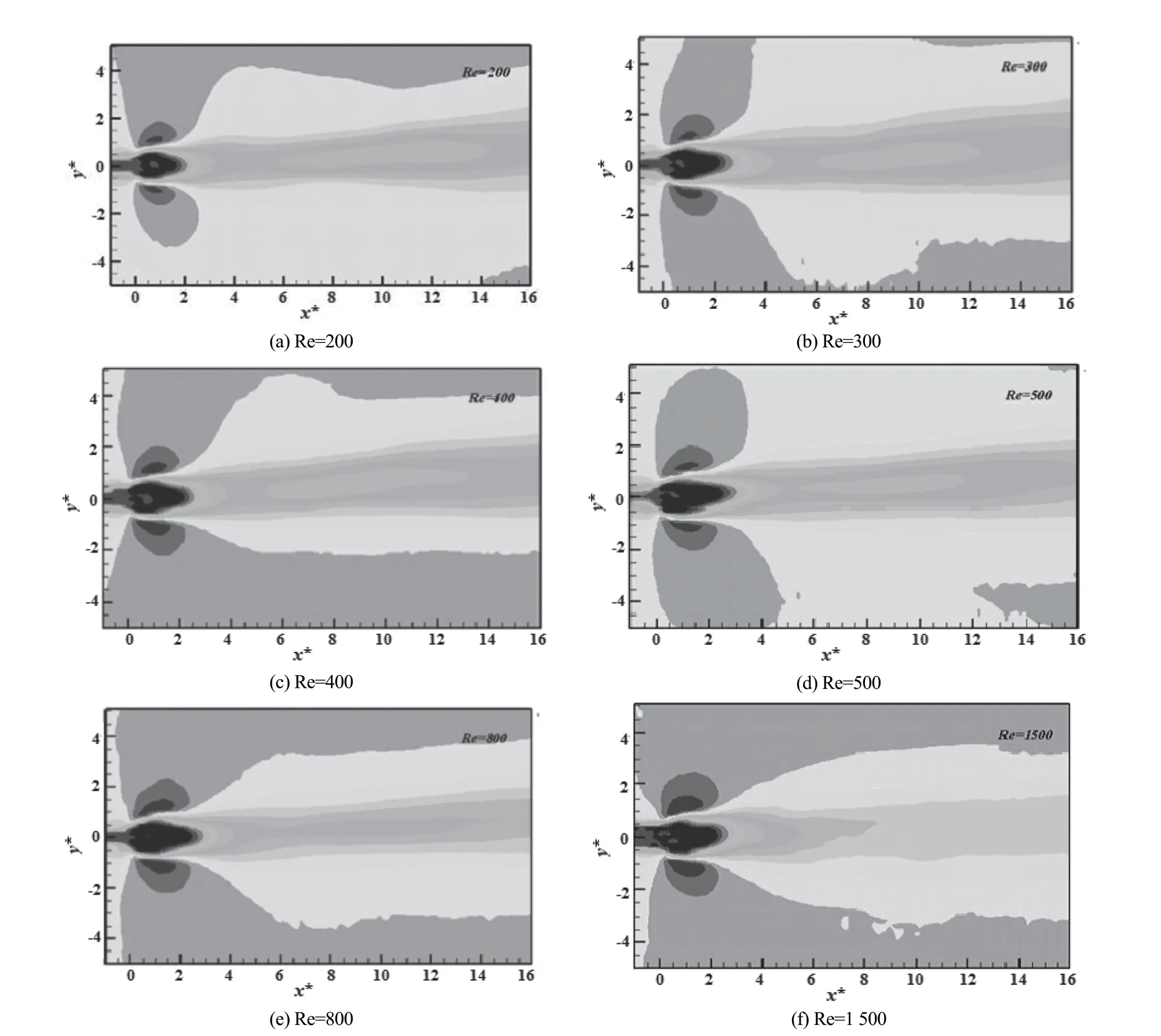
圖6 不同雷諾數下的時均速度分布云圖

圖7 不同雷諾數下的尾渦形成長度
結果表明:雷諾數由200增大到300時,阻力系數增大;在雷諾數為300時,阻力系數達到最大值;此后,隨著雷諾數的增大,阻力系數減小;當Re=1 500時,阻力系數最小。
4 結論
(1)利用氫氣泡示蹤法進行流動顯示實驗,發現流體經過正三棱柱體柱面對來流時,流動分離點位于正三棱柱體底邊頂點,而且隨著雷諾數的變化,分離點位置不變。
(2)通過PIV測得瞬時速度場,處理得到時均速度分布云圖,發現明顯的回流區域,且隨著雷諾數的增大,尾渦形成長度先增大后減小,Re=800時尾渦形成長度取得最大值。
(3)對時均速度場尾跡中心線速度進行定量分析,得到的尾渦形成長度大小規律與流動狀態圖符合。
(4)定量計算阻力系數大小,得出隨著雷諾數的增大,阻力系數先增大后減小,在Re=300工況下阻力系數最大,在Re=1 500工況下阻力系數最小。