端射陣機載雷達距離模糊雜波抑制方法
2020-06-06 12:07:40李永偉謝文沖王少波
雷達科學與技術 2020年2期
關鍵詞:方法
李永偉, 謝文沖, 王少波
(1.空軍預警學院雷達兵器運用工程軍隊重點實驗室, 湖北武漢 430019;2.中國人民解放軍32036部隊, 重慶 401320)
0 引言
端射陣天線[1-3]是指最大輻射方向指向陣列排布軸向的一類天線。目前,在軍事應用中,平面端射陣列天線因其低剖面特性和定向輻射特性而備受青睞,可以很好地應用于機載雷達的前后向補盲上。而端射陣機載雷達的實際工程應用首要解決的問題就是雜波抑制的問題,由于端射陣通常呈前視陣放置,因而與傳統側射陣機載雷達一樣,不可避免地要面臨雜波的距離非平穩問題[4-5]。常規的空時自適應處理方法[6](STAP)雖然對平穩雜波有著良好的抑制效果,但雜波的距離非平穩問題則會導致其無法在待檢測距離單元雜波處形成深而窄的凹口,使得雜波抑制性能大幅下降而無法正常檢測運動目標。
針對傳統側射前視陣的雜波距離依賴性問題,國內外學者進行了大量的研究。雜波距離依賴性補償方法主要有角度多普勒補償方法[7]、基于配準的補償方法[8](RBC)以及空時內插法[9](STINT)等。這些方法在無距離模糊時有著良好的效果,而當存在距離模糊時,由于同一距離門近程雜波與遠程雜波混在一起,使用上述的方法在對近程非平穩雜波進行補償的同時,會影響到遠程雜波的空時分布,從而導致補償失效。文獻[10]提出了利用俯仰信息維來解決雜波距離模糊問題,從源頭上去除了近程非平穩雜波;文獻[11]提出了一種基于RBC原理的改進方法,能夠在補償近程非平穩雜波的同時,還能保證遠程模糊雜波數據的平穩性;文獻[12]則提出了一種基于STINT原理的方法,對解決模糊距離下的近程雜波抑制問題,有著良好的效果。
由于機載預警雷達在空-空模式下一般工作在中高頻狀態,距離模糊不可避免,因此本文重點分析了現有的存在距離模糊時3種基于側射陣的典型近程雜波抑制方法對于端射陣的適用性。首先基于端射陣機載雷達雜波回波模型,分析了端射陣機載雷達雜波譜在距離模糊情況下的雜波特性;其次從方法原理層面分別對上述方法的雜波抑制機理進行了簡要論述;最后從方法應用于端射陣后的雜波抑制性能、魯棒性以及運算量三個方面進行了適用性綜合分析評價,并得出了有益的結論。
1 端射陣機載雷達雜波特性
1.1 雜波模型
如圖1所示,設載機以速度V作勻速直線飛行,天線為M行N列的矩形前向平放陣列,其中列子陣為端射單元,陣元列間間距為dx,行間間距為dy,工作波長為λ。陣面法線垂直于載機飛行方向,各列子陣與飛行方向平行。圖中,θ為方位角,φ為俯仰角,ψ為空間錐角,假設天線主瓣指向(θ0,φ0)。
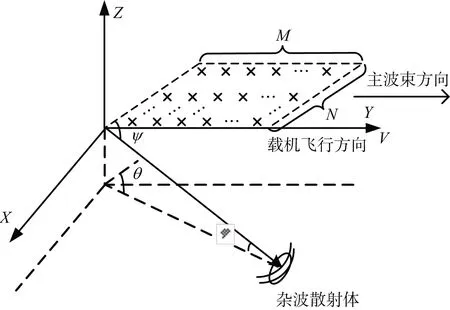
圖1 端射陣機載雷達陣列幾何關系
設接收天線通道數(列子陣數)為N,相干處理脈沖數為K,則雷達接收到的某個距離環上的空時采樣雜波回波信號表示為
(1)
式中,A(θi,φia)為雜波點(θi,φia)處雜波幅度,Na為距離模糊數,Nc為某一等距離環內包含的雜波散射體的數目。
S(θi,φia)=SS(θi,φia)?ST(θi,φia)
(2)
為空時導向矢量,?為Kronecker積。

(3)

(4)
分別為空域導向矢量和時域導向矢量,ωs,ωt分別為空域角頻率和時域角頻率,具體表達式為
(5)
(6)
式中,fr為脈沖重復頻率,V為載機速度。
1.2 存在距離模糊時的雜波譜特性
由于端射陣無后向遮擋反射效應,為消除后向柵瓣,需進一步減少行間間距[2]。為了與實際工程應用相符,本節在仿真時假設端射陣為16行8列,呈前視陣放置[1]。接收天線采用20 dB切比雪夫加權,接收機噪聲系數3.5 dB,帶寬3 MHz,距離門寬度50 m,其他仿真參數見表1。
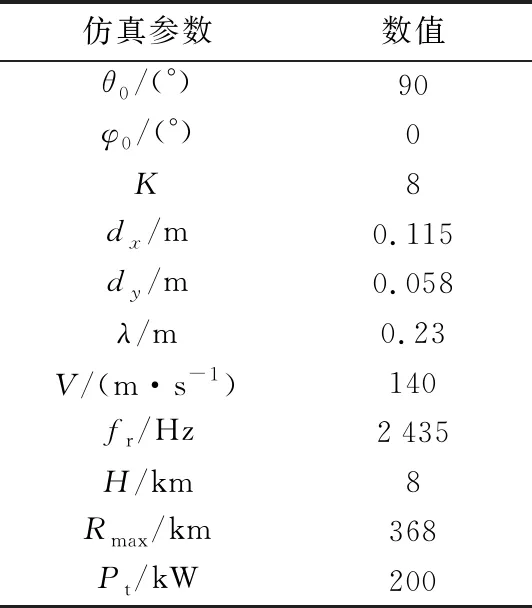
表1 仿真參數設置
圖2給出了端射陣機載雷達在15 km處無距離模糊的雜波功率譜,圖3、圖4則給出了雷達在135 km處無距離模糊和存在距離模糊時的雜波功率譜和特征譜,圖5給出了存在距離模糊時的雜波多普勒-距離譜。
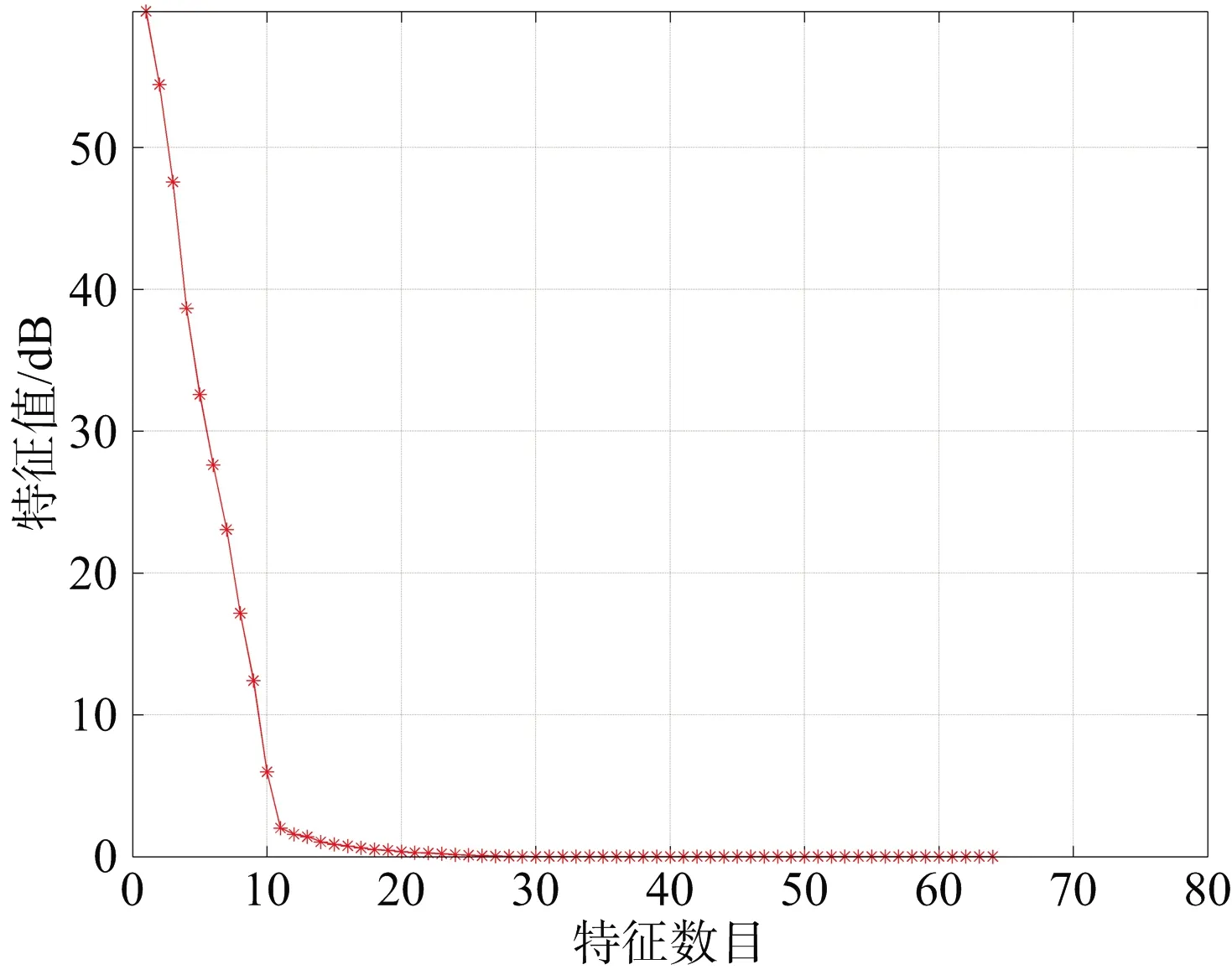
(b) 特征譜
由圖2和圖3(a)可知,由于后向俯仰副瓣的存在,端射陣機載雷達的近程雜波軌跡為一個整圓,而遠程雜波功率則主要集中分布在主瓣區,這一特點在圖5中體現得更加明顯。比較圖3和圖4可知:一方面,距離模糊使得不同距離的雜波疊加在一起,導致雜波成分與復雜度增加,雜波相關性減少,表現為雜波自由度的顯著增加;另一方面,由于近程非平穩副瓣雜波疊加到遠程平穩雜波上,使得雜波功率譜在角度-多普勒域上嚴重展寬,這些變化使得傳統STAP技術的雜波抑制性能大幅下降。
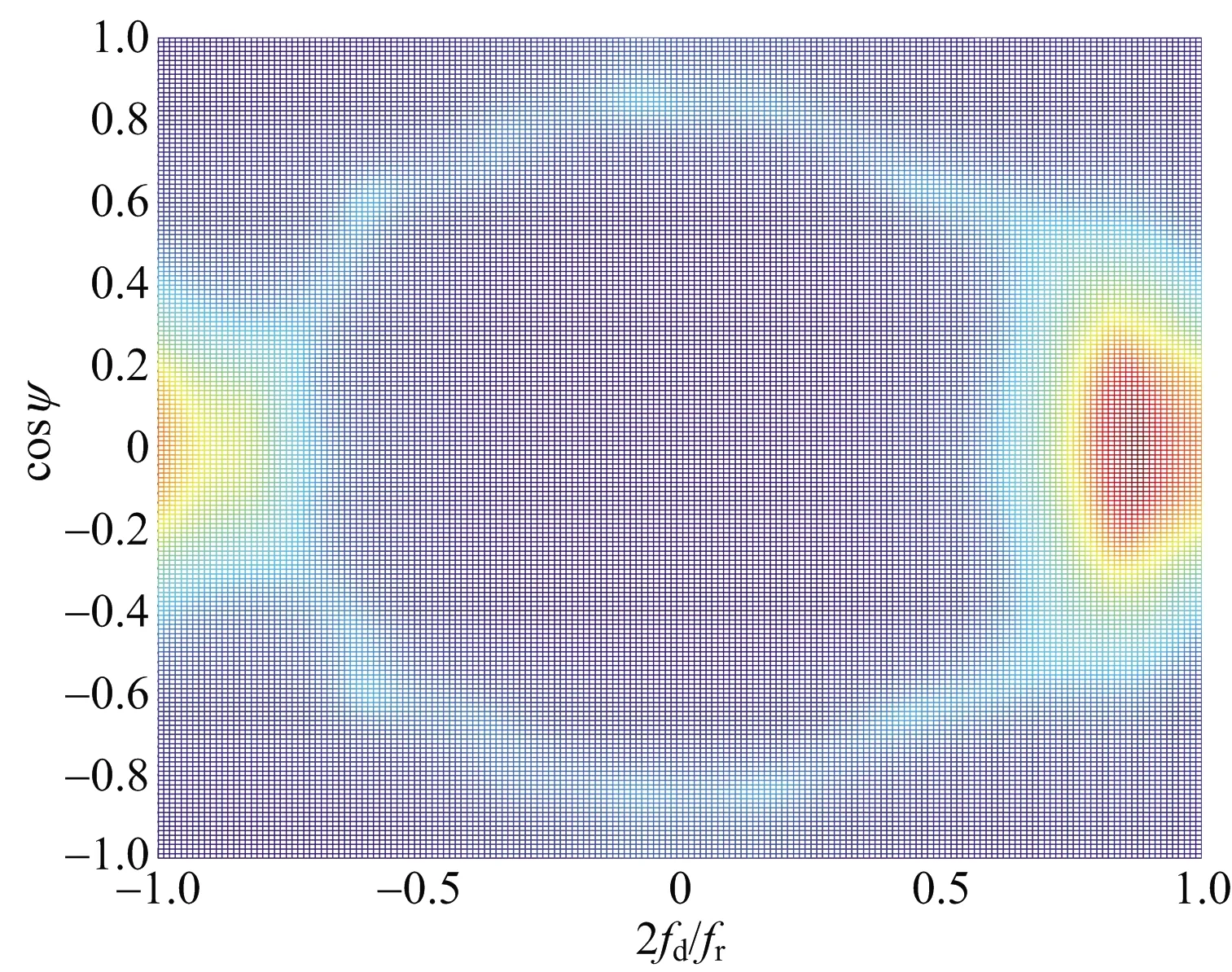
(a) 功率譜
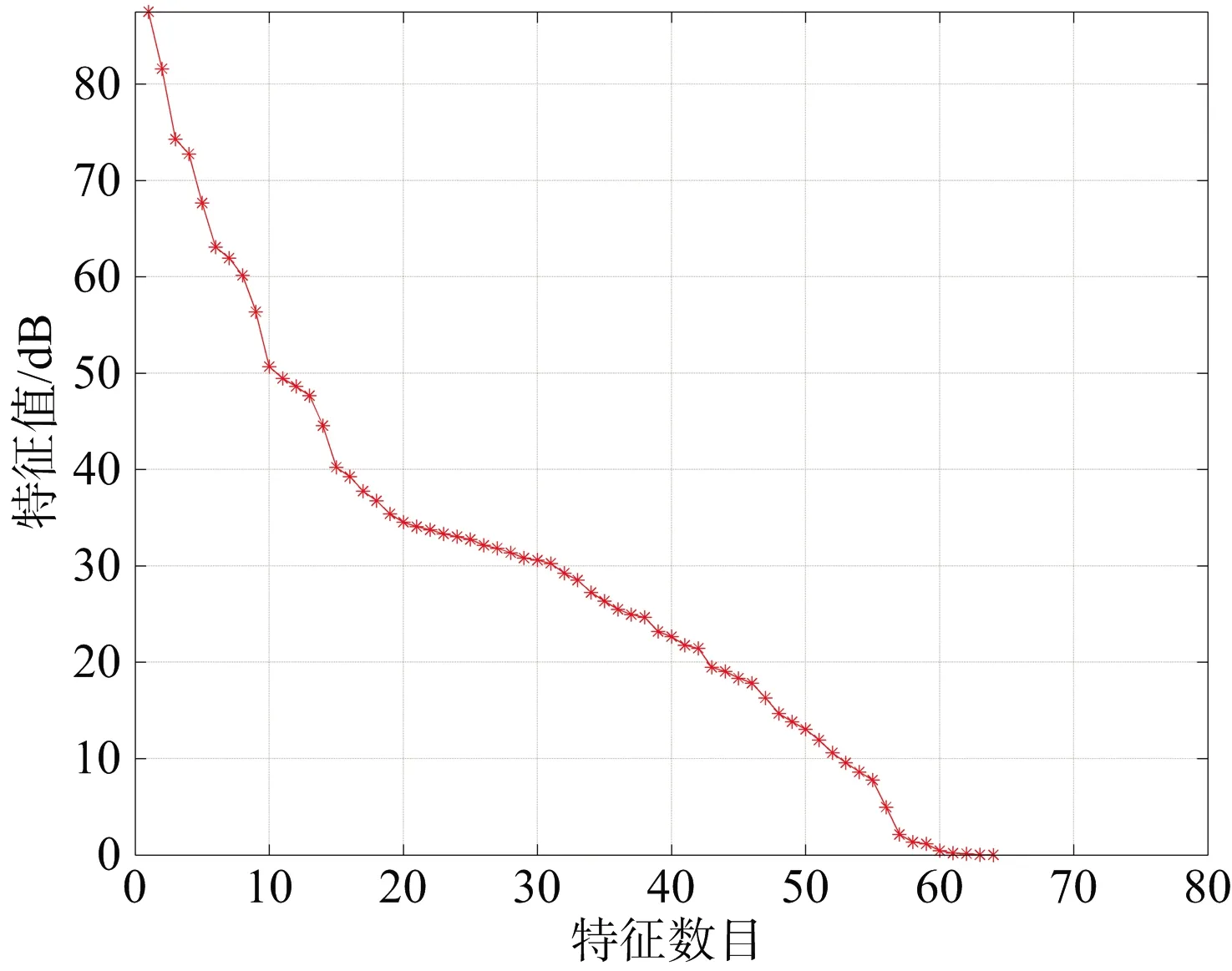
(b) 特征譜
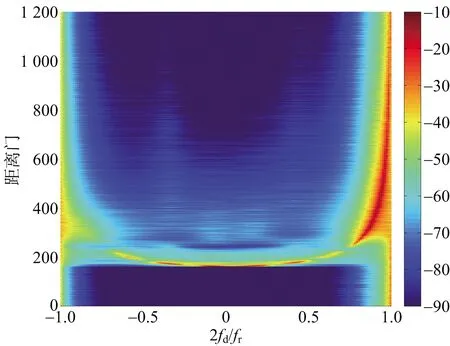
圖5 存在距離模糊的雜波距離-多普勒譜
由圖5可知,雜波中心頻率隨距離明顯變化主要集中體現在第160~800距離門,也就是在近程8~40 km范圍內,因此模糊后距離超過40 km(即5倍載機高度)的雜波我們可以將其視為平穩雜波,在進行非平穩雜波補償時我們也只需對近程距離門雜波進行補償即可。
2 存在距離模糊時典型雜波抑制方法原理介紹
2.1 基于俯仰維信息的近程雜波抑制方法
目前,利用陣列俯仰維信息進行近程非平穩雜波抑制方法主要有兩種,2D STAP級聯處理方法和直接3D STAP方法。由于2D STAP級聯處理方法需要先從俯仰向形成凹口濾除近程非平穩雜波后再進行二維STAP處理,而端射陣因陣列平放,其俯仰向導向矢量不僅與俯仰角有關,而且與方位角有關,因此無法形成單獨的俯仰向凹口,因而2D STAP級聯方法不適用于端射陣。而與傳統的方位-多普勒空時二維數據結構不同的是,3D STAP直接增加了俯仰維數據,通過俯仰-方位-多普勒域三維信息,可以直接濾除近程非平穩雜波。圖6為3D STAP方法雜波抑制原理圖。
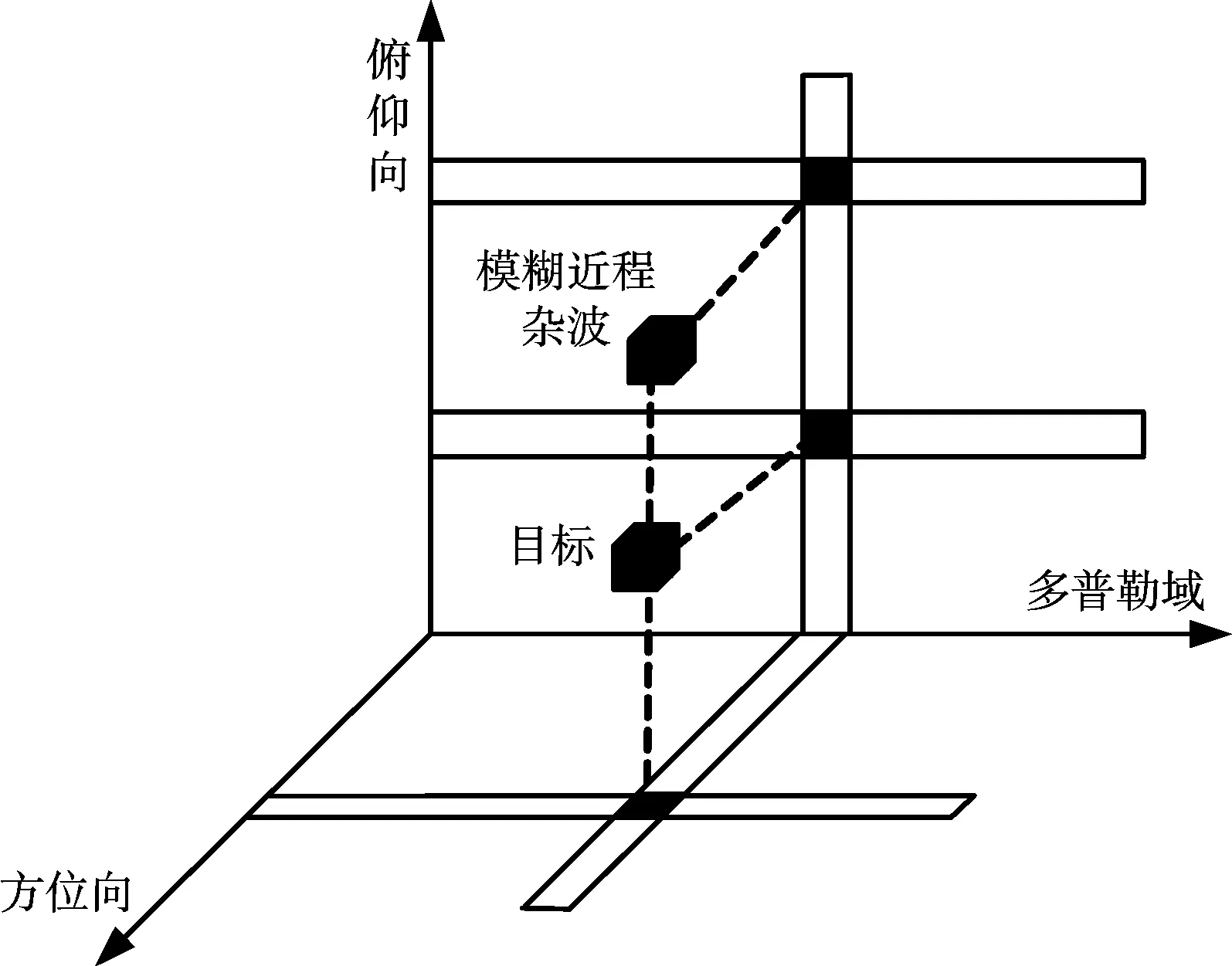
圖6 3D STAP方法雜波抑制原理圖
由圖6可以看出,當存在距離模糊時,與目標具有相同多普勒頻率和方位角的模糊近程強雜波由于在方位-多普勒域完全重合,因此無法通過傳統2D STAP方法抑制;3D STAP方法充分利用了該模糊雜波與目標在俯仰角上的差別,形成俯仰濾波凹口實現對近程模糊雜波的抑制。
2.2 基于RBC原理的近程雜波抑制方法


(7)

圖7 基于RBC方法雜波補償示意圖
2.3 基于空時插值原理的近程雜波抑制方法
基于STINT方法基本思想是尋找一個插值變換方陣,使得每個存在距離模糊距離門的雜波空時導向矢量矩陣Vl,經插值變換后可逼近本距離門遠程雜波脊對應的空時導向矢量矩陣VlF。STINT方法的補償原理示意圖如圖8所示,可以看出,經STINT法處理后,近程具有距離依賴性的雜波脊被映射到遠程雜波脊上,消除了近程雜波的距離依賴性。
圖8 基于STINT方法雜波補償示意圖
2.4 原理特點分析
3D STAP方法通過增加俯仰維信息能夠對近程非平穩雜波直接進行區分并抑制,無需雜波補償的過程,因而其相對于其他兩種須先進行補償而后進行STAP處理的方法而言,有著本質的區別。而基于RBC原理的方法和基于STINT原理的方法都要求要能夠精確計算出每個距離門各個模糊距離的雜波軌跡,因而都是以載機系統的飛行參數和位置信息等先驗信息的精確已知為前提,不同的是:1)基于RBC原理的方法配準的是雜波的協方差矩陣,因而其中既包含著雜波脊位置的配準,又包含著雜波功率的配準,而基于STINT原理的方法則只配準了雜波脊的位置信息。2)補償參考對象不同,RBC方法的參考對象選取為重構的最遠訓練單元的協方差矩陣;STINT方法的參考對象則選取為某一待補償距離單元剔除掉近程雜波脊后的剩余遠程雜波脊對應的空時導向矢量采樣矩陣之和。
3 仿真與適用性分析
本節通過仿真對基于RBC原理的雜波補償方法以及基于STINT原理的雜波補償方法在端射陣存在距離模糊時的補償效果進行對比分析(3D STAP方法無補償過程),并以3DT降維方法為例對三種典型雜波抑制方法進行雜波抑制性能分析,仿真參數見表1。同時為了方便分析比較,突出端射陣的特點,本節也適時給出了側射陣的仿真結果,側射陣為8行16列面陣,呈前視放置,其他參數同表1。
3.1 雜波補償效果仿真分析
圖9~圖11給出了135 km處補償前后的雜波功率譜。由圖9可知,未經補償的雜波功率譜展寬嚴重,若直接進行空時自適應處理,將得到寬且淺的雜波抑制凹口,難以有效抑制雜波;由圖10~圖11可知,經過這兩種方法補償后,無論是端射陣還是側射陣,雜波功率譜均明顯變窄,譜重合度大大改善。但對比圖9~圖11可知,對于側射陣而言,STINT方法對于雜波的補償性能明顯要優于RBC方法;而對于端射陣,STINT方法補償效果卻大大下降,雜波譜仍然具有一定程度的展寬,與RBC方法的效果相差甚遠。
(a) 端射陣
(b) 側射陣
(a) 端射陣
(b) 側射陣
(a) 端射陣
(b) 側射陣
RBC方法和STINT方法補償性能存在差別的原因分析如下:
一方面,由于RBC方法既補償了雜波位置信息又補償了雜波功率信息,而STINT方法先計算出雜波脊空時導向矢量,對空時導向矢量進行擬合補償后再進行雜波協方差矩陣的估計,這勢必會將計算擬合空時導向矢量的誤差在估計協方差的時候進一步放大,而且只補償了雜波脊位置信息,這對于副瓣雜波較嚴重的側射陣而言影響不大,甚至因其相對于RBC方法具有更精準的雜波位置補償功能而獲益,但是對于遠程副瓣雜波較弱甚至可以忽略的端射陣而言卻嚴重改變了其原始功率分布;另一方面,因為端射陣雜波軌跡為一整圓,相對于側射陣的半圓軌跡而言,其空時導向矢量的采樣數與擬合誤差又將進一步加大。這兩方面的原因導致了在側射陣具有良好補償效果的基于STINT方法對于端射陣卻補償效果不佳。
此外,由于RBC方法是先對每個距離門雜波協方差矩陣進行重構,然后再對重構的協方差矩陣進行補償,而重構過程勢必會帶來雜波功率估計的誤差[8],因而無論是側射陣還是端射陣,經RBC補償后都會在雜波脊上出現偽峰,如圖10所示。
3.2 雜波抑制性能仿真分析
3.2.1 理想情況下

(a) 端射陣
(b) 側射陣
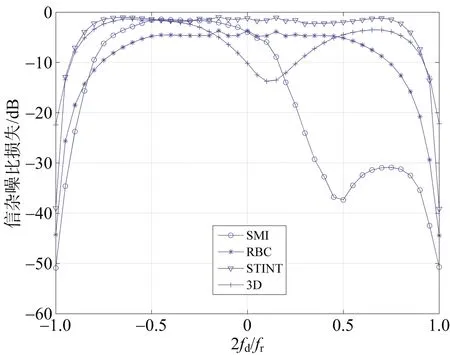
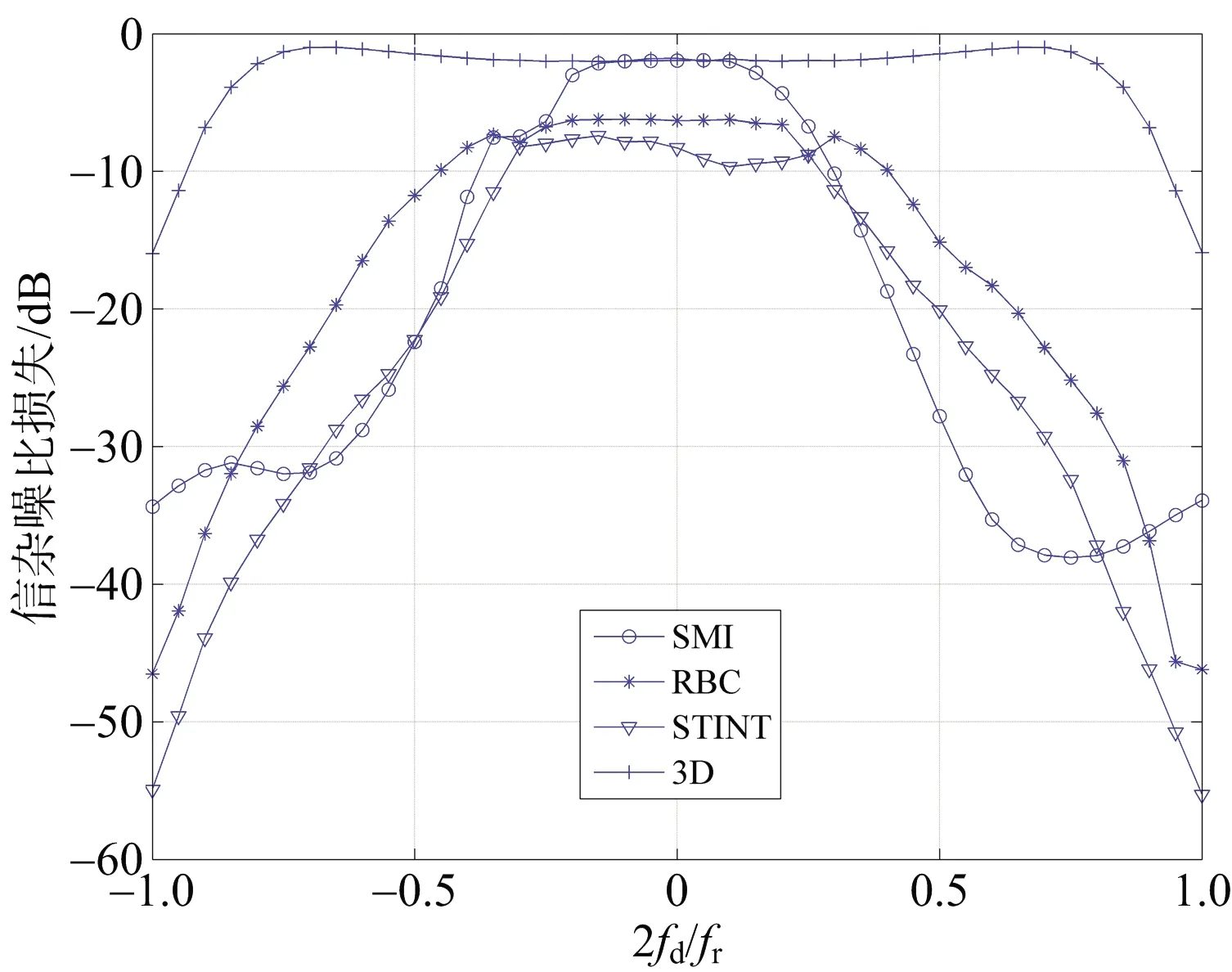
圖12則給出了理想情況下距離模糊雜波經過三種方法處理后的信雜噪比(SCNR)損失比較圖。由圖12可知,相對于側射陣而言,端射陣3D STAP方法無論是在主瓣區還是在旁瓣區,都有著更好的雜波抑制性能,其對于主瓣區性能的大幅度改善更是其他方法所不能比擬的。RBC方法相對于SMI而言在主瓣區性能有非常不錯的改善效果,但是在旁瓣區仍然存在一定的性能損失;而STINT方法雖然用于側射陣有著巨大的優勢,尤其在旁瓣區性能甚至超過3D STAP,但其對于端射陣效果卻比較差。
3.2.2 存在誤差情況下
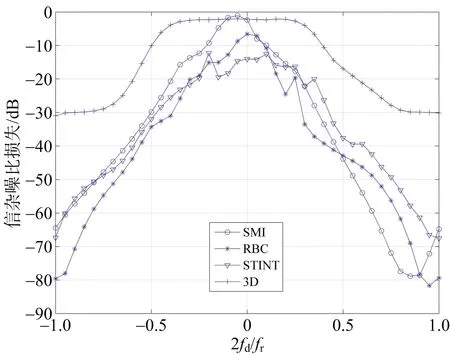
為了進一步研究分析各種方法對于誤差的敏感程度,圖13給出了存在各種誤差下信雜噪比損失比較圖。通過比較可知,當存在各種誤差時,相對其他兩種方法而言3D STAP方法受影響較小,而RBC方法性能則急劇下降,尤其是存在雜波起伏時幾乎達不到任何補償效果,STINT方法雖然性能比較穩定,受影響較小,但因其先天性能不理想,因而也無明顯優勢。
(a) 5%雜波起伏

(b) 5%陣元誤差
(c) 5%通道誤差
3.3 計算量比較
表2給出了三種方法對某一距離單元進行雜波抑制時所需的計算量。為了便于直觀比較,下面給出具體參數情況下的三種方法的計算量。假設距離模糊數Na取6,空時導向矢量采樣點數P取2NK,空間平滑子孔徑G、時間平滑子孔徑J皆取4,其他參數同表1。在上述參數下三種方法的計算量分別為1.26×109,7.87×106和5.78×105。因此,3D STAP計算量遠遠高于其他兩種方法,其次是RBC方法,最小的是STINT方法。

表2 計算量比較
3.4 適用性分析
基于以上內容,本節對上述三種典型的存在距離模糊下近程雜波抑制方法對于端射陣機載雷達的適用性進行進一步的綜合分析。
1) 3D STAP方法雜波抑制性能最優,在存在誤差的情況下也能保持較好的改善性能,但是其系統自由度增大,所需訓練樣本數大大增加,計算量大,因而需利用各種降維降秩手段在性能損失不大的情況下進一步降低所需樣本數和計算量。
2) 基于RBC原理的方法,在計算量不太大的同時又有著比較不錯的雜波抑制性能,但是容易受到誤差影響,魯棒性較差。
3) 基于STINT原理的方法雖然魯棒性好且計算量又小,但是其對于端射陣而言先天雜波補償性能不足。
4) 此外,兩種基于雜波補償的方法在對非平穩雜波進行補償變換的過程中還可能使目標信號產生搬移或者相消,因而還必須在算法中增加運動目標約束條件,而3D STAP則不存在此類問題。
綜上所述,對于存在距離模糊的端射陣機載雷達而言,綜合考慮雜波抑制性能、魯棒性以及運算量等因素,上述方法中最具有應用發展潛力的是3D STAP方法及其降維方法;基于RBC原理的雜波抑制方法在進一步改善其魯棒性后亦具有相當不錯的應用潛力;而基于STINT原理的雜波抑制方法作為一種經典的非平穩雜波抑制方法,雖然對于傳統側射陣而言有著良好的消除模糊雜波距離依賴性的效果,但是由于受到端射陣后向輻射作用以及其雜波空時分布特性的影響,其對于端射陣機載雷達而言卻并不適用。
4 結束語
本文基于端射陣機載雷達雜波回波模型,分析了端射陣機載雷達雜波譜在距離模糊情況下的空時分布特性,并進一步對端射陣機載雷達存在距離模糊時典型近程雜波抑制方法的基本原理和雜波抑制性能進行了介紹和仿真分析;最后綜合考慮各種因素,對這三種典型的近程雜波抑制方法對于端射陣機載雷達的適用性進行了分析,得出了3D STAP方法及其降維方法在工程實現中最具有潛力,而基于RBC原理的雜波抑制方法經過適當改進后亦可以用于端射陣機載雷達距離模糊雜波的抑制,而利用俯仰向信息的2D級聯STAP方法以及基于STINT原理的雜波抑制方法對于端射陣機載雷達而言卻并不適用的有益結論,為端射陣機載雷達雜波抑制方法的進一步研究提供了重要參考。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56