CRInSAR和PSInSAR技術(shù)在地表形變監(jiān)測中的應(yīng)用
2020-06-04 12:19:25顏芳孫芳徐銳岳雷劉宇薇
無線互聯(lián)科技 2020年8期
關(guān)鍵詞:測量
顏芳 孫芳 徐銳 岳雷 劉宇薇


摘 ? 要:基于人工角反射器和永久散射體的InSAR技術(shù)對(duì)于監(jiān)測地面形變的效果理想,能夠檢測到3~5個(gè)毫米級(jí)量級(jí)的地表形變運(yùn)動(dòng),可彌補(bǔ)靜力水準(zhǔn)測量、GNSS監(jiān)測在地表形變監(jiān)測的不足。文章描述了位于涿州園區(qū)的CR的設(shè)計(jì)、安裝方法,并結(jié)合該CR和距離園區(qū)5 km內(nèi)的PS形變數(shù)據(jù)進(jìn)行了分析,驗(yàn)證了角反射器InSAR技術(shù)在地表形變監(jiān)測領(lǐng)域的可行性。
關(guān)鍵詞:合成孔徑雷達(dá)干涉測量;人工角反射器;永久散射體;地表形變監(jiān)測;精度分析
1 ? ?技術(shù)背景
合成孔徑雷達(dá)干涉測量(Interferometric Synthetic Aperture Radar,InSAR)技術(shù)作為一種連續(xù)的、區(qū)域覆蓋的地面形變監(jiān)測方法,在地質(zhì)災(zāi)害監(jiān)測領(lǐng)域發(fā)揮了愈來愈明顯的作用[1-2]。而基于人工角反射器(Corner Reflector,CR)和永久散射體(Permanent Scatters,PS)的InSAR技術(shù),簡稱CRInSAR和PSInSAR技術(shù)的出現(xiàn)有效地提高了重軌圖像系列的時(shí)間相干性和空間相干性,測量精度也較常規(guī)InSAR測量精度有所提高[3-6]。本文描述了CR的原理、設(shè)計(jì)方法,并結(jié)合該CR和距離園區(qū)5 km內(nèi)的PS形變數(shù)據(jù)進(jìn)行了分析。
2 ? ?角反射器的設(shè)計(jì)
2.1 ?角反射器的結(jié)構(gòu)設(shè)計(jì)
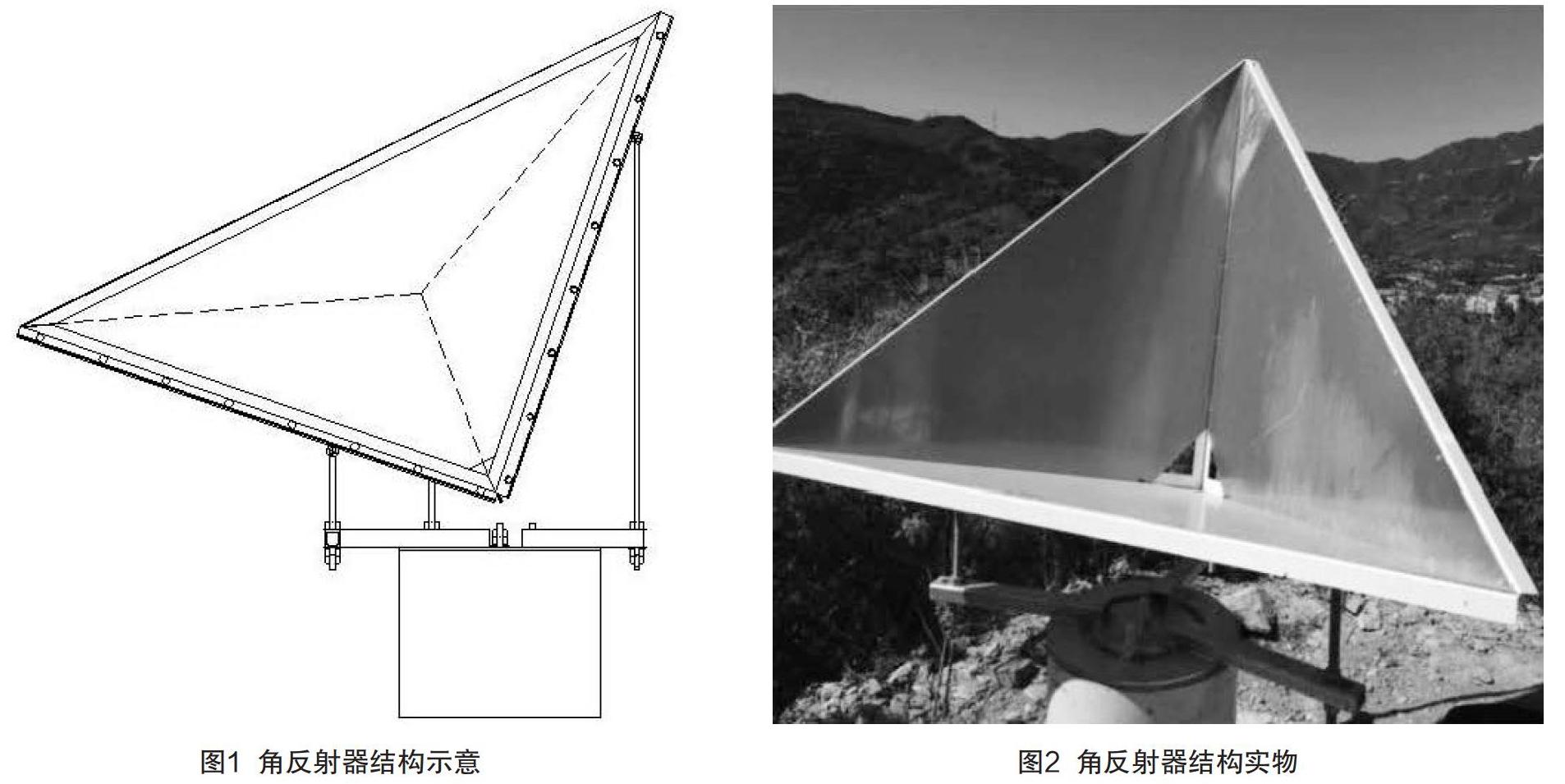
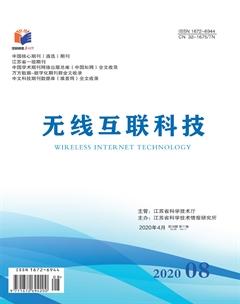
本方案中選用三面角的角反射器,如圖1—2所示。材料為鋁板和鍍鋅鐵皮雙層結(jié)構(gòu),鋁板厚度3 mm,外加鍍鋅鐵皮(1 mm厚)以保護(hù)反射面(鋁板),邊側(cè)加三角角鋼加固;3塊金屬板之間的相互垂直角度加工公差不超過±1°;在棱邊設(shè)置了3個(gè)活動(dòng)關(guān)節(jié),通過伸縮桿來調(diào)節(jié)CR的仰角;在頂?shù)滋幵O(shè)置了一漏水孔,防止積水影響其反射路線;為獲得最大反射截面(Radar Cross-Section,RCS),可根據(jù)雷達(dá)數(shù)據(jù)軌道信息來調(diào)整角反射器的底邊方位角,并使角反射器的底邊與衛(wèi)星飛行方向平行。
2.2 ?角反射器的結(jié)構(gòu)尺寸及角度參數(shù)
根據(jù)調(diào)研,可以獲取SAR數(shù)據(jù)的雷達(dá)衛(wèi)星包括德國TanDEM-X系統(tǒng)、意大利Cosmo-SkyMed星座、日本ALOS-2衛(wèi)星、歐空局Sentinel-1星座等4個(gè)雷達(dá)衛(wèi)星系統(tǒng)。其中前3個(gè)為收費(fèi)系統(tǒng),歐空局的Sentinel-1星座(兩顆衛(wèi)星—A,B)提供免費(fèi)數(shù)據(jù)下載。收費(fèi)衛(wèi)星數(shù)據(jù)費(fèi)用高昂,每景數(shù)據(jù)的費(fèi)用根據(jù)參數(shù)不同為一萬多元到六萬多元不等。出于成本考慮,項(xiàng)目最終選取歐空局的Sentinel-1星座提供的數(shù)據(jù)進(jìn)行研究。該數(shù)據(jù)下載一景約7.8 G,需2~3天。
根據(jù)選取的衛(wèi)星系統(tǒng),最終確定角反射器的各參數(shù)如下:
(1)CR的底邊尺寸。需要達(dá)到所接收雷達(dá)信號(hào)波長的10~80倍,而Sentinel-1雷達(dá)系統(tǒng)的中心頻率為5.405 GHz,則其波長λ為5.55 cm。所以可設(shè)計(jì)CR直角邊為1.2 m(21倍)或者1.5 m(27倍)。
(2)底邊方位角。根據(jù)所要選取的SAR數(shù)據(jù)獲取模式:升軌或者降軌(見圖3),來調(diào)整角反射器的底邊方位角,并使角反射器的底邊與衛(wèi)星飛行方向平行。最終計(jì)算確定升軌角反的底邊方位角為10.7°(朝西),降軌角反的底邊方位角為10.7°(朝東)。
(3)CR仰角。根據(jù)SAR衛(wèi)星的入射角調(diào)整CR的仰角。當(dāng)雷達(dá)波入射方向與CR的法線方向平行時(shí),CR散射截面最大,因此CR的布設(shè)應(yīng)滿足這一條件。由于SAR數(shù)據(jù)訂購之后,其衛(wèi)星的入射角是一定的,因此CR的仰角是固定不隨地點(diǎn)變化的。Sentinel-1衛(wèi)星在Interferometric Wide Swath模式下的入射角為30°~42°。因?yàn)闊o法精確確定設(shè)備安裝點(diǎn)的衛(wèi)星入射角,所以選取衛(wèi)星入射角中間值36°作為入射角,γ=90°-35.264°-θ,則仰角γ的值為18.736°。
3 ? ?試驗(yàn)測試
3.1 ?儀器布設(shè)
在涿州工業(yè)園區(qū)安裝2臺(tái)角反射器,針對(duì)哨兵1號(hào)衛(wèi)星布設(shè),一臺(tái)降軌朝向(1號(hào)CR),一臺(tái)升軌朝向(2號(hào)CR)(見圖4)。因1號(hào)CR的滴水孔尺寸太小,已被樹葉及灰塵全部堵住,角反射器的反射面氧化嚴(yán)重,下文不再對(duì)1號(hào)CR的數(shù)據(jù)進(jìn)行分析。
3.2 ?試驗(yàn)結(jié)果
本次試驗(yàn)獲取了2018年1月1日—2018年11月的20景哨兵1升軌和降軌影像。20期影像中1號(hào)CR無任何影像,2號(hào)CR點(diǎn)處的“十字星”不明顯,PS點(diǎn)角反射器反映明顯的“十字星”特征,其影像特征如圖6所示。
2號(hào)CR點(diǎn)和3號(hào)PS點(diǎn)在SAR影像中的分布,與實(shí)際GNSS接收機(jī)測試的坐標(biāo)一致,如圖7所示。
經(jīng)過IN-SAR形變計(jì)算,獲得2號(hào)升軌角反射器的形變曲線如圖8所示。
經(jīng)過IN-SAR形變計(jì)算,獲得PS角反射器的形變曲線如圖9所示。
3.3 ?結(jié)果分析
根據(jù)上面的試驗(yàn)結(jié)果分析如下:(1)1號(hào)CR因氧化嚴(yán)重,從SAR影像上根本無法識(shí)別。(2)2號(hào)CR在SAR影像上的十字星特征不明顯,但能識(shí)別到,可能是垂直度誤差大于1°,也可能是角反射器放的位置偏低引起,目前約1 m左右,在后面的試驗(yàn)中會(huì)改進(jìn)角反射器的設(shè)計(jì),將垂直度誤差調(diào)整至小于1°,同時(shí)調(diào)整角反射器的安裝高度至5 m左右。(3)由于2號(hào)CR在7月23號(hào)的高程調(diào)整了25 mm,其可能引起該CR在SAR影像上高程的變化,無法標(biāo)定其代表的光學(xué)點(diǎn)在高程上變化了多少,但從圖8中可以看出2號(hào)CR在調(diào)整高度后高程有上升的趨勢。(4)3號(hào)PS點(diǎn)的“十字星”特征明顯,該P(yáng)S點(diǎn)的高程變化在0~3.5 mm,能夠比較真實(shí)地反映該P(yáng)S點(diǎn)所在的區(qū)域的變化趨勢。
4 ? ?結(jié)語
通過試驗(yàn)發(fā)現(xiàn),本試驗(yàn)中設(shè)計(jì)的1號(hào)CR和2號(hào)CR無論從設(shè)計(jì)上還是安裝上,均有許多需要改進(jìn)的地方,并不能真實(shí)地反映該區(qū)域的高精度形變趨勢。但通過SAR影像獲取的PS點(diǎn),有較明顯的“十字星”,可以監(jiān)測該P(yáng)S點(diǎn)所在區(qū)域的形變趨勢。
若后期有條件的話可以考慮用收費(fèi)的衛(wèi)星數(shù)據(jù),從歐空局網(wǎng)站上下載免費(fèi)的哨兵一號(hào)數(shù)據(jù),其數(shù)據(jù)空間分辨率為20 m,而目前在軌商業(yè)SAR衛(wèi)星空間分辨率最高可到1 m。可以考慮購買商業(yè)SAR衛(wèi)星的數(shù)據(jù)來增加測量的精度。
[參考文獻(xiàn)]
[1]李德仁.衛(wèi)星雷達(dá)干涉測量原理與應(yīng)用[J].測繪科學(xué),2000(1):9-12.
[2]何敏.合成孔徑雷達(dá)干涉測量技術(shù)及其在形變?yōu)暮ΡO(jiān)測中的應(yīng)用[J].水電自動(dòng)化與大壩監(jiān)測,2005(2):45-48.
[3]涂鵬飛,諶華,甘衛(wèi)軍.應(yīng)用CRInSAR技術(shù)監(jiān)測三峽庫區(qū)滑坡形變[J].大地測量與地球動(dòng)力學(xué),2010(S1):126-128.
[4]石曉春.一種新型的高精度形變監(jiān)測技術(shù)—PSInSAR[J].大地測量與地球動(dòng)力學(xué),2006(增刊):87-91.
[5]金雙根,朱文耀.GPS觀測數(shù)據(jù)提高InSAR干涉測量精度的分析[J].遙感信息.2001(4):8-11。
[6]陳強(qiáng).基于永久散射體雷達(dá)差分干涉探測區(qū)域地表形變研究[D].成都:西南交通大學(xué),2006.
Abstract:The research and application show that the InSAR technology based on artificial angle reflector and permanent scatterer is ideal for monitoring the ground deformation, and can detect the surface deformation motion of 3~5 millimeters, which can make up for the deficiency of static leveling and GNSS monitoring in the surface deformation monitoring. This paper describes the design and installation method of the CR located in Zhuozhou Park, and analyzes the deformation data of the CR and the PS within 5 km from the park to verify the feasibility of the angular reflector InSAR technology in the field of surface deformation monitoring.
Key words:interferometric synthetic aperture radar; corner reflector; permanent scatters; surface deformation monitoring; accuracy analysis
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00
- 無線互聯(lián)科技的其它文章
- 基于物聯(lián)網(wǎng)的智慧林業(yè)可持續(xù)發(fā)展策略研究
- 網(wǎng)絡(luò)虛擬化環(huán)境下應(yīng)用型本科網(wǎng)絡(luò)工程專業(yè)人才培養(yǎng)模式的研究
- 基于LMIS的高校圖書管理信息化系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
- 無線通信技術(shù)在物聯(lián)網(wǎng)中的應(yīng)用
- 基于LoRa物聯(lián)網(wǎng)技術(shù)的智能照明控制方案在高速公路上的應(yīng)用
- 基于大數(shù)據(jù)分析的分布式MOLAP技術(shù)研究