基于磁流變阻尼器的高速受電弓模糊半主動控制
2020-06-04 05:37:42賴森華楊基宏
科學技術與工程 2020年11期
關鍵詞:模型
楊 崗, 李 芾, 賴森華, 楊基宏, 曹 偉
(1.西南交通大學機械工程學院,成都 610031;2.中車青島四方機車車輛股份有限公司技術中心,青島 266111)
電力機車通過弓網獲取外界電能。弓網為活動耦合關節,是影響列車安全的關鍵要素。弓網性能取決于機車速度、弓網參數及其匹配關系。機車高速運行時,接觸壓力波動劇烈,受流質量下降,且致使碳滑板與接觸線磨損嚴重,產生大量噪聲和熱量;極端情況下,甚至發生離線現象并出現燃弧,燒結弓網;隨著服役時間增長,接觸網參數及弓網匹配關系發生劣化,致使弓網性能劣化,影響列車運行安全。為實現經濟性的弓網性能改善,弓網主動控制、半主動控制應用逐步成為研究熱點。楊崗等[1-2]、Arie等[3]建立了弓網耦合三元半主動動力學模型,并使用仿真手段研究了線性二次型調節器(liner quadratic regulator, LQR)、滑模等控制策略,效果良好。魯小兵等[4]針對SBS81、DSA250、DSA380和SSS400+型受電弓建立了弓網模型,設計了最優控制器、變結構控制器和模糊控制器,進行了仿真研究。任志玲等[5]進行了基于接觸力歷史數據,利用預測控制技術的弓網半主動控制研究,結果表明能有效提高弓網耦合質量。任朋彪[6]設計了基于數字信號處理器(digital signal processor,DSP)及比例-積分-微分(proportion-integral-differenti, PID)控制的主動控制試驗系統實現對弓網間的接觸力的主動控制。半主動控制消耗外界能源極少,控制過程魯棒性高,在建筑、海洋鉆油平臺、車輛、航空、橋梁等領域已有較多應用[7-9],但在弓網控制方面卻鮮有研究。磁流變阻尼器(magnetorheological damper, MRD)是應用磁流變液在外界磁場作用下阻尼特性可變機理而制造的減振裝置[10],具有物理結構簡單、阻尼特性可調、響應迅速(毫秒級)、控制力大、耐久性好、耗電少等優點,可應用于阻尼半主動控制。接觸網在長線路中結構多變,且受隨機外界激勵影響,是復雜、結構不確定的非線性動力學系統。模糊控制算法魯棒性強,不需要被控系統有精準數學模型,因此特別適合于受電弓的主動控制。
現研究模糊控制策略下的剪切閥式磁流變阻尼受電弓半主動控制,通過仿真手段,分析磁流變變阻尼半主動控制對弓網振動性能的影響。
1 磁流變阻尼器力學模型
磁流變液(magnetorheological fluid, MRF)是黏性、塑性等流體性能在磁場作用下能急劇改變的材料,特征是施加外部磁場,其能在毫秒內從流動液體變為半固體,且變化可逆。MRF性能機理較為復雜,一般通過實驗確定其力學特性,MRF在磁場作用下剪應力和剪應變速率間關系可由Bingham黏塑性模型描述[11],其關系為
(1)

剪切屈服強度τy為MRF的重要性能指標[11],研究表明,顆粒未達磁飽和時:
τy=K1Hα
(2)
顆粒達到磁飽和時:
(3)
式中:K1和K2為常數,與MRF顆粒含量、形狀、直徑、飽和磁化強度等要素有關;α為取值范圍,為1~2的常數;Ms為顆粒的飽和磁化強度,A/m。
磁流變阻尼器(MRD)是利用磁流變液特性而構建的一種半主動控制裝置,根據MRF的受力狀態和流動特性,MRD主要類型有剪切、閥、剪切閥(圖1)和擠壓流動等形式,其中剪切閥式MRD實際應用較多,其阻尼力計算模型[10]為
(4)
式(4)中:Lh為活塞長度,m;d為活塞桿直徑,m;D為容器內直徑,m;h為活塞與容器的間隙,m。
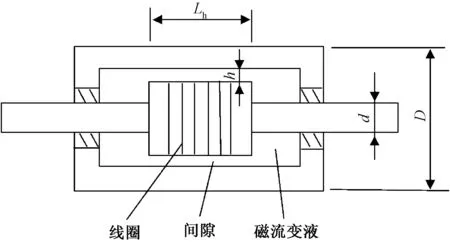
圖1 剪切閥式磁流變阻尼器原理圖Fig.1 Diagram of shear valve magnetorheological damper
2 弓網磁流變阻尼器半主動控制模型
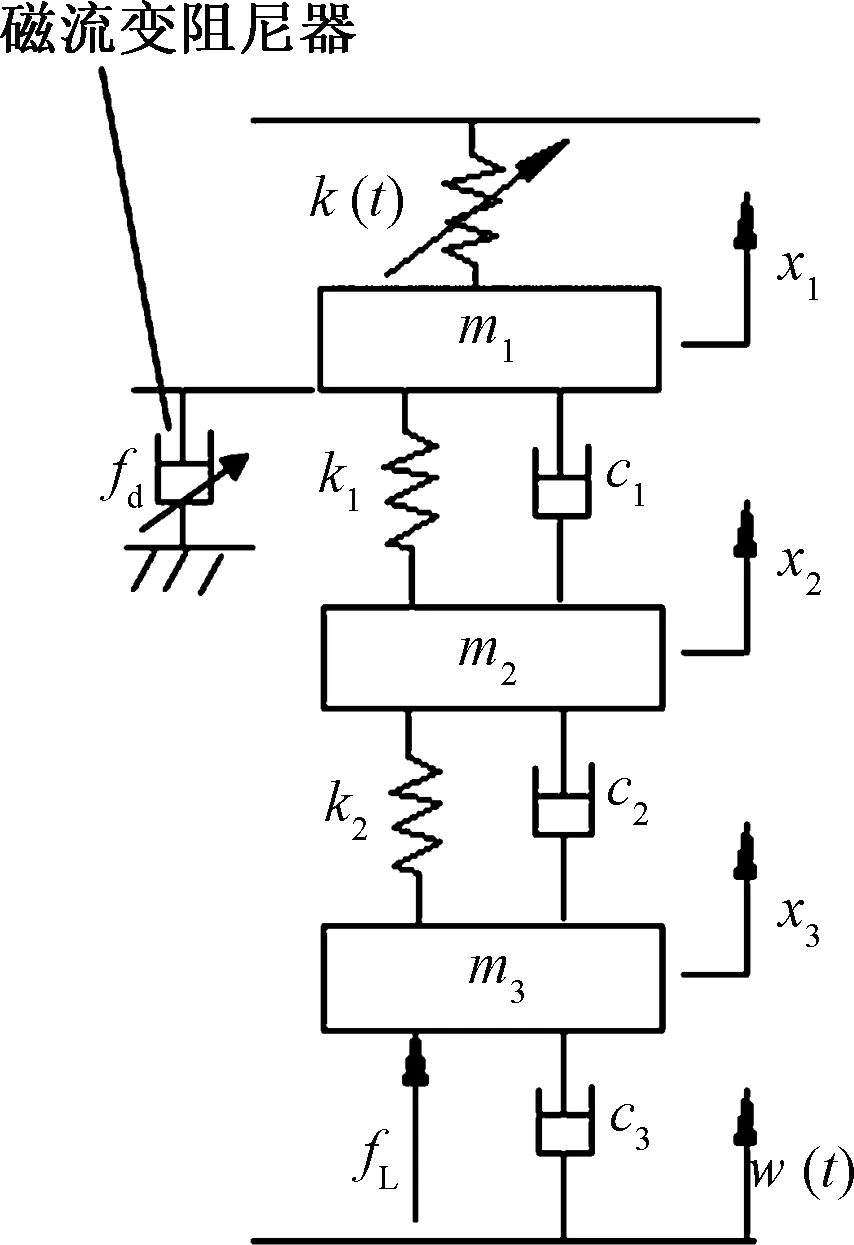
圖2 弓網半主動控制模型Fig.2 Mode of semi-active pantograph-catenary system
弓網的動力學系統極端復雜,動力學模型自由度無限,研究中通常將其簡化,圖2所示為弓網半主動控制模型[12]。模型中,受電弓歸算為三集中質量及理想彈簧阻尼,接觸網理想化為變剛度彈簧接觸力元,k(t)為其接觸彈簧等效剛度,N/m;m1、m2、m3分別為弓頭、上框架、下框架質量,kg;k1、k2為弓頭及框架剛度,N/m;c1、c2、c3為弓頭、框架阻尼,N·s/m;w(t)為機車激擾信號,m;fL為受電弓靜抬升力,N;fd為磁流變阻尼器阻尼系數。文獻[6]給出了一種接觸網剛度表達式,即
(5)
式(5)中:
為機車速度,m/s;L為接觸網跨距,m;L1為相鄰吊弦間距,m;k0為可變彈簧平均剛度,N/m;α1、α2、α3、α4和α5為剛度差異系數。對于國內彈性鏈形懸掛接觸網,試驗并分析可得k0=1 925,α1=0.075 5,α2=-0.073 5,α3=-0.145 9,α4=-0.057 5,α5=0.069 9。
在弓網系統的弓頭m1處安裝一個磁流變阻尼器,形成半主動控制受電弓,則弓網系統的動力學模型為
(6)
式(6)中:

根據第2節所述,磁流變阻尼器的阻尼力可以寫成如下形式:
(7)
式(7)中右邊第1項是被動黏滯阻尼力,不可控制、調節;第2項是可變庫侖阻尼力,可以控制、調節,控制的過程是依據某種控制策略,調節磁流變阻尼器的輸入電流,控制磁場強度,進而改變MRF剪切屈服強度,從而產生控制所期望的控制力。因此,式(6)右邊的磁流變阻尼控制力項Bsfd可以分解為兩部分,即
(8)
式(8)中:第1項是變阻尼器的被動黏滯阻尼力,其中Ck為被動黏滯阻尼力作用矩陣;第二項usy是變阻尼器按某種控制算法實現的可控庫侖阻尼力。將式(8)帶入式(6),則弓網系統變阻尼半主動控制動力學方程為
(9)
(10)
Y=C0Z(11)
式中:
在變阻尼半主動控制中,變阻尼器只能提供與其相對速度相反的力。也正因如此,變阻尼半主動控制無條件穩定,系統魯棒性良好。
3 模糊控制器及控制策略設計
弓網系統是非線時變動力學系統,常規線性控制策略與方法難以達到期望目標,而模糊控制策略不需要精確的被控對象的動力學模型,強調使用人類控制經驗和知識,是解決弓網系統主動、半主動控制問題的有效手段。
3.1 模糊控制原理
模糊控制基本思想如圖3所示,其核心為虛線框內的控制器部件,主要包括模糊化、推理機、規則庫和反模糊化等要素。因此弓網模糊控制的主要工作是設計控制器,包括模糊規則、模糊化與反模糊化方法、模糊控制輸入輸出變量論域等方面的設計工作;模糊規則選取包括語言變量設定、語言值隸屬度設計和構建模糊推理規則等。
3.2 模糊控制器的輸入輸出

圖3 模糊控制原理圖Fig.3 Diagram of fuzzy control
在弓網系統半主動控制器設計中,選擇弓網接觸壓力偏差e(t)=r(t)-y(t) 和接觸壓力偏差變化率de(t)/dt為控制器輸入變量。控制器輸出選取用于控制磁場強度的電流i(t)。弓網系統控制目標為弓網接觸力趨于70 N。依據專家經驗及線路試驗,e(t)論域取為[-200 200],N;de(t)/dt論域取為[-2 000 2 000],N/s;i(t)論域取為[0 2], A。
3.3 輸入輸出量模糊化
在模糊控制中,輸入輸出變量是接近于人類語言的語言變量,其值域并非具體數值,而是類似于“極大”“大”“小”等定性描述的語言值。本研究中,為接觸力偏差E、接觸力偏差變化率DE等兩個語言變量設定相同的語言值域,即T(E)=T(DE)={NB,NM,NS,ZO,PS,PM,PB}({負大,負中,負小,零,正小,正中,正大}),電流I的語言值集合為T(I)={VB,B,M,S,VS,ZO}({極大,大,中,小,極小,零}),語言值E、DE、I對應的論域e(t)、de(t)及i(t)取值連續,使用隸屬曲線描述其對應關系。隸屬曲線主要有正態分布、三角形、梯形等形式,其中三角形隸屬度表示法操作簡單,推理資源消耗低,且能夠達到控制精度的要求,故本次研究采用三角形隸屬度函數。圖4~圖6分別列出了E、DE及I語言值的隸屬度曲線。
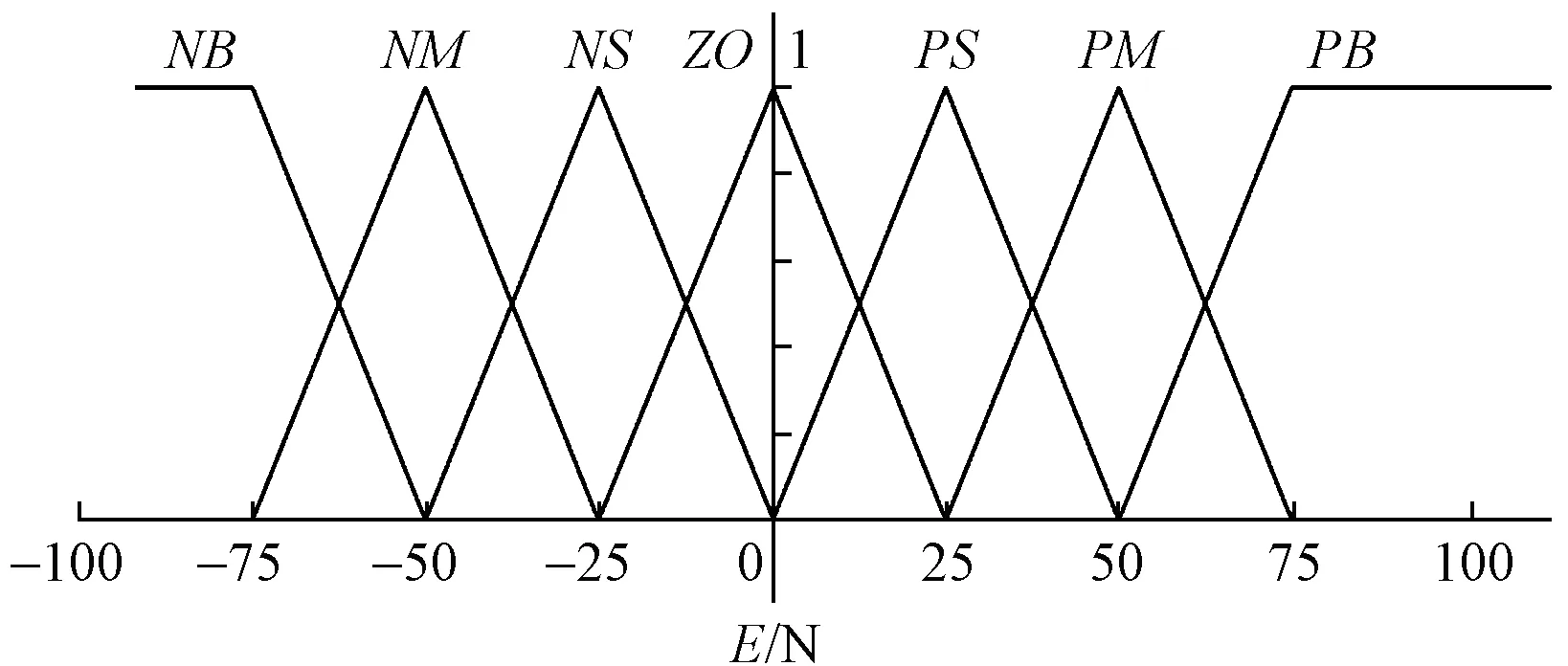
圖4 偏差E的隸屬度曲線Fig.4 Membership degree of E
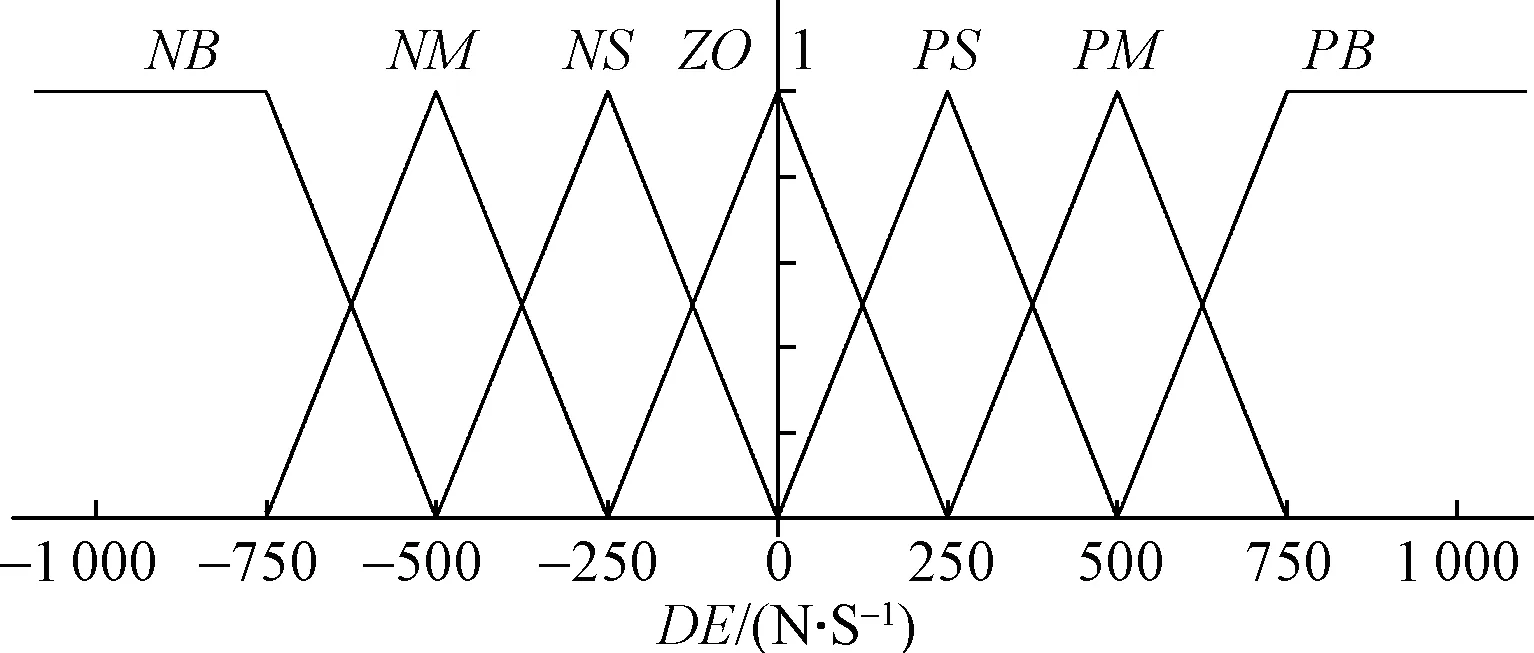
圖5 偏差變化速度DE的隸屬度曲線Fig.5 Membership degree of DE
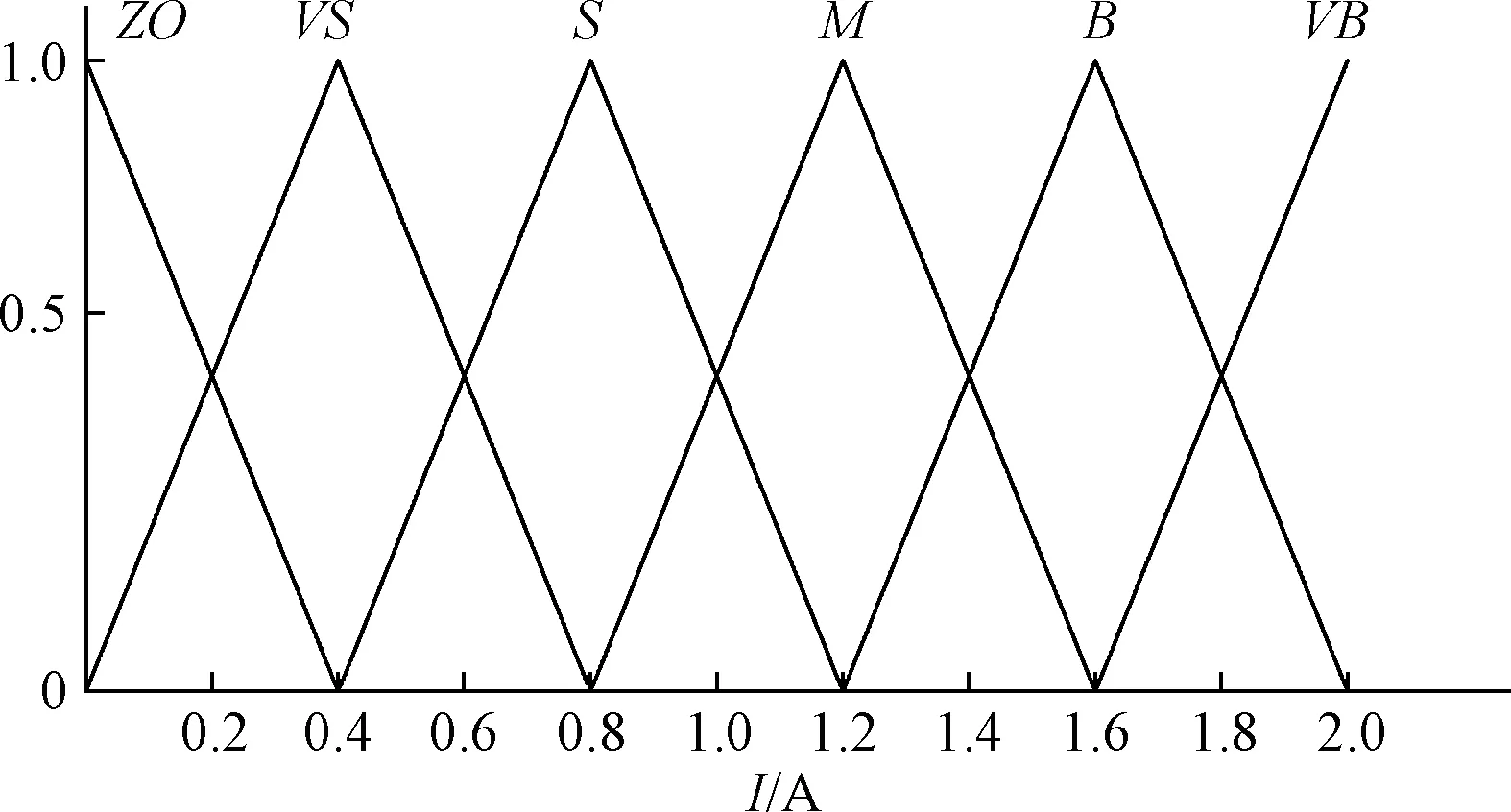
圖6 控制電流I的隸屬度曲線Fig.6 Membership degree of I
3.4 模糊控制規則表
模糊推理以規則知識庫為基礎進行推理,是控制效果的主要決定因素,建立良好規則庫的前提是設計者應具有豐富的歷史經驗及專業知識。本次研究基于以下原則建立推理知識庫:①當誤差較大時,控制量的選取以盡快消除誤差為主;②當誤差較小時, 控制量的選取以保持系統穩態為出發點,盡量防止超調。基于以上原則并結合專家經驗設計表1所示的模糊推理規則表。
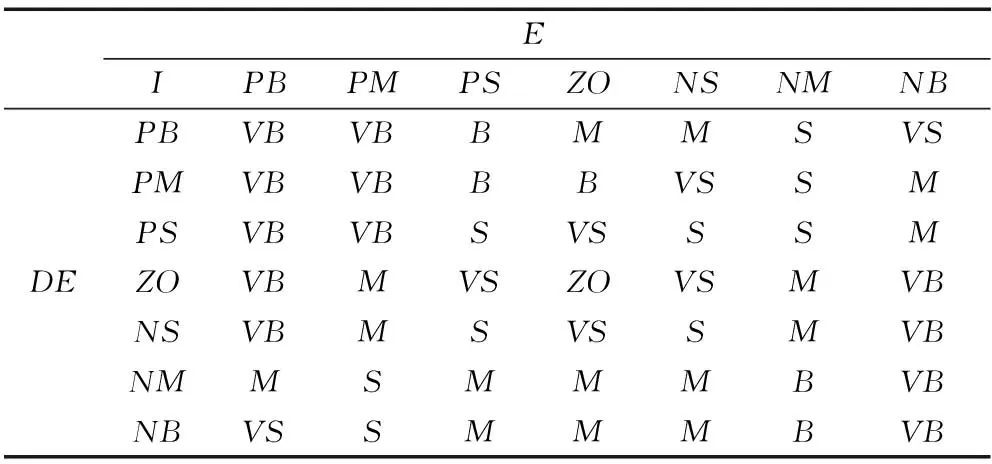
表1 模糊控制規則表
3.5 輸出量反模糊化
模糊推理得到輸出變量電流I是語言值,在實際弓網控制系統中,必須使用確定的電流i(t)才能控制磁流變阻尼器以產生相應阻尼力。因此需要將語言值I反模糊化為具體數值。反模糊化主要有最大隸屬度、重心、加權平均、平均、隸屬度限幅元素平均等方法,其中重心法較為簡單可靠且應用較廣,因此選用重心法反模糊化電流輸出。
4 弓網MRD半主動控制仿真與分析
4.1 主動控制算法參數
MRD半主動控制參數設計時需參照主動控制策略的主動控制力。首先設計模糊主動控制器,其輸入及其語言變量與模糊半主動控制器相同,控制器輸出為弓頭與框架間的主動控制力u(t),論域取為[-80 80];與其相對應的語言變量為T(U)={NB,NM,NS,ZO,PS,PM,PB}。在列車速度為150、350 km/h工況下,主動控制下仿真結果如圖7、圖8所示。可以看出:模糊主動控制下弓網接觸力波動幅度降幅達70%;接觸力最大值降幅達50%;接觸力最小值升幅達80%。
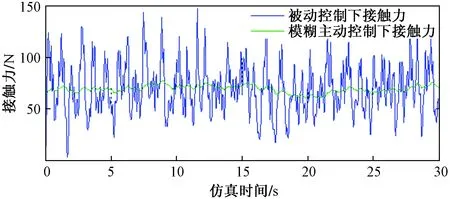
圖7 v=150 km/h時,主動控制下弓網接觸力Fig.7 Contact force with v=150 km/h under active control
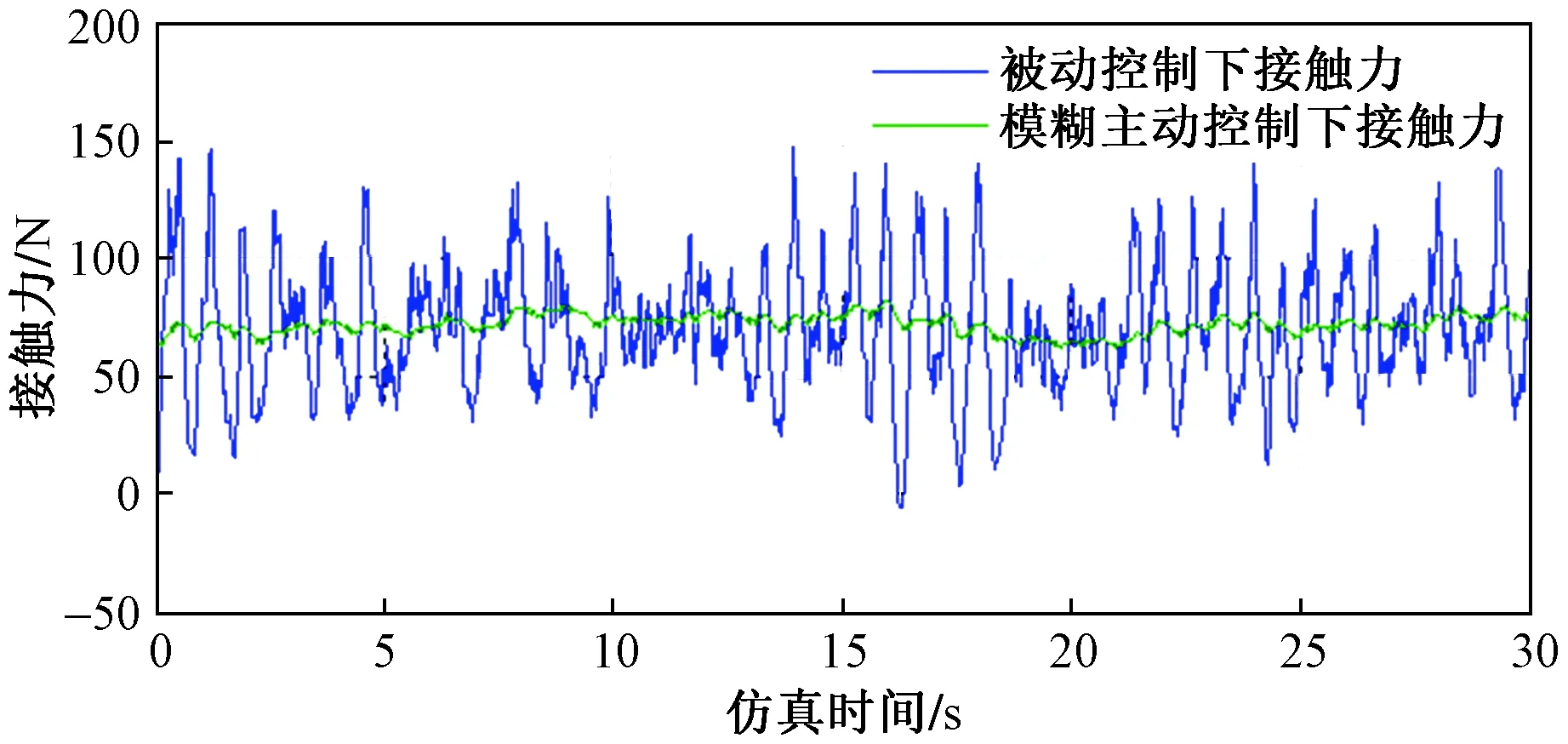
圖8 v=350 km/h時,主動控制下弓網接觸力Fig.8 Contact force with v=350 km/h under active control

4.2 磁流變阻尼器參數設計
為使變阻尼半主動控制與主動控制的效果接近,系統中的磁流變阻尼器產生的阻尼力(包括黏滯阻尼力和庫侖阻尼力)上限應等于最大主動控制力[13],即
(12)
式(12)中:fdymax為庫侖阻尼力最大值,假定MRD的最小庫侖阻尼力fdymin=0,其阻尼力可調倍數s=6,則由式(12)可得:
(13)

設計阻尼器在電流強度為2 A時達到最大阻尼力,則可求的理想阻尼器的力學函數:
(14)
4.3 弓網模糊半主動控制仿真
利用SIMULINK軟件,建立弓網MRD半主動控制模型的計算機仿真模型。仿真時采用如下參數[14]:接觸網采用彈性鏈形懸形式,其剛度見式(5);受電弓參數m1=6.4 kg,m2=7 kg,m3=12 kg,k1=2 650 N/m,k2=10 000 N/m,c1=100 N·s/m,c2=100 N·s/m,c3=70 N·s/m;w(t) 取噪聲功率為0.01的白噪聲;采用式(14)表示的MRD的力學模型。
圖9、圖10所示為機車在150 km/h和350 km/h工況下的被動控制及模糊半主動控制仿真結果,可見,模糊半主動控制能夠有效抑制弓網接觸力波動程度,提高弓網接觸平穩性,進而提高弓網受流質量。
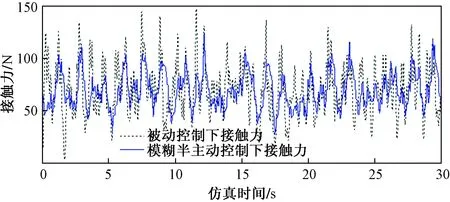
圖9 v=150 km/h 時,半主動控制下弓網接觸力Fig.9 Contact force with v=150 km/h under semi-active control
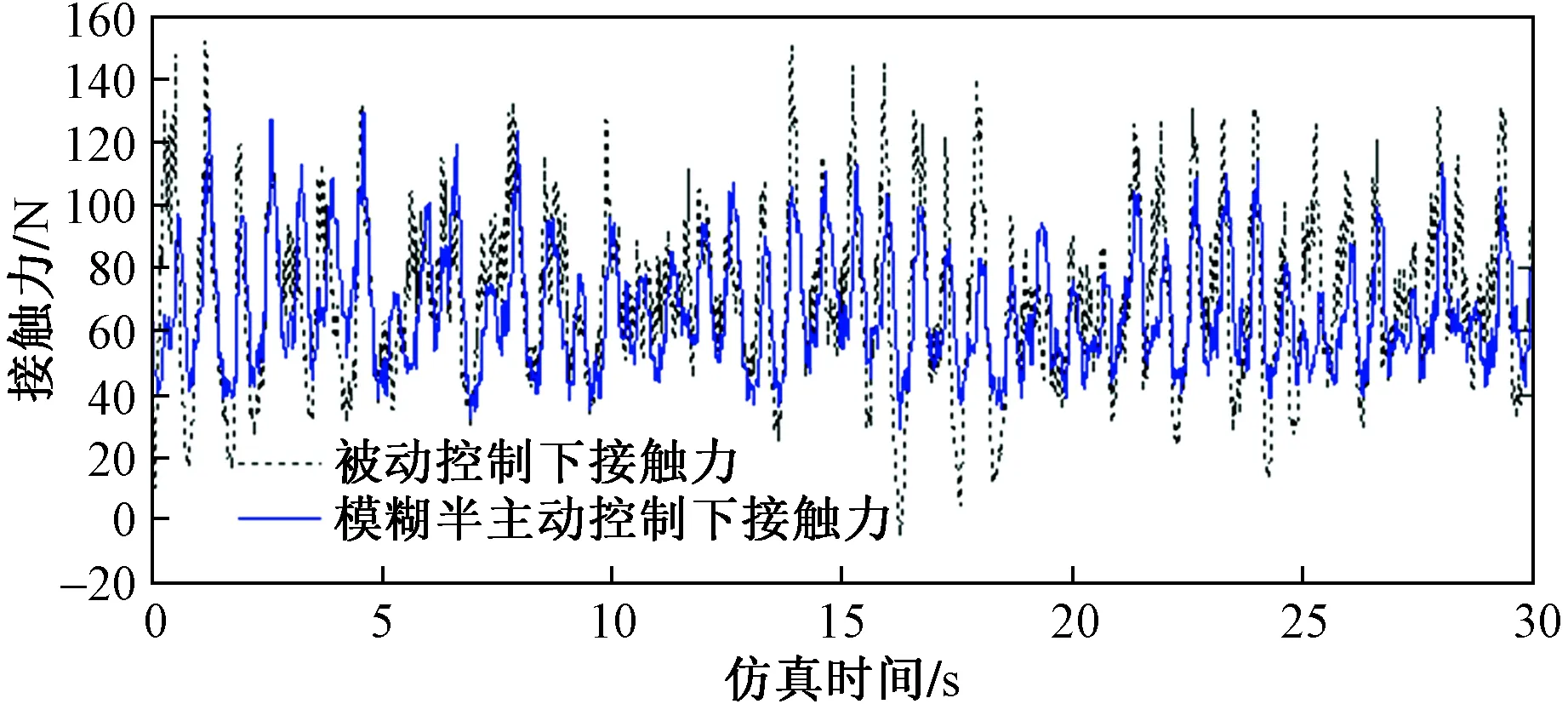
圖10 v=350 km/h時,半主動控制下弓網接觸力Fig.10 Contact force with v=350 km/h under semi-active control
4.4 模糊半主動控制對受流質量影響分析
為定量分析模糊半主動控制效果,對上述仿真數據,選取接觸力最大值Fmax、最小值Fmin、接觸不均勻系數c作為評價指標進行弓網受流質量分析[12,15]。可得出表2、表3所示的數據。

表2 v=150 km/h時,受流質量指標

表3 v=350 km/h時,受流質量指標
由表中分析數據可知,在不同的運行速度等級下,MRD模糊半主動控制方法是改善弓網振動特性的重要的可行的手段,可有效提高弓網接觸力最小值,降低接觸力最大值,降低弓網接觸力不均勻系數。從而使弓網接觸壓力的波動程度得到極大改善,弓網受流質量得到有效提高。
5 結論
研究了受電弓阻尼模糊半主動控制機理,建立了弓網MR阻尼模糊半主動控制算法及其動力學模型,通過SIMULINK仿真工具分析了模糊控制策略下MRD半主動控制弓網動態性能,得出如下結論:
(1)受電弓MRD模糊半主動控制對不同速度工況下的弓網系統性能均有良好提升作用,降低弓網接觸力波動幅度達20%;降低弓網接觸力最大值,幅度達20%;提高接觸力最小值,幅度達80%;使弓網離線率降至0。
(2)磁流變阻尼器半主動控制過程無條件穩定,具有良好魯棒性。在列車高速運行環境下,MRD半主動控制技術將成為改善弓網性能,降低牽引能耗和噪聲的重要手段。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
