車輛盲區監測系統分析及標準研究
2020-06-04 04:00:44李鑫慧唐風敏華一丁
汽車電器 2020年5期
郭 蓬,李鑫慧,唐風敏,華一丁,王 通,何 佳
(1.中國汽車技術研究中心有限公司,天津 300300;2.中汽研 (天津)汽車工程研究院有限公司,天津 300300)
1 概述
盲區監測 (Blind Spot Detection)是無人駕駛領域中十分重要的一部分。因為車輛的設計構造以及人眼視覺范圍兩方面原因,駕駛員在駕駛過程中會擁有一定的盲區范圍,難以準確掌握全部周圍環境。在汽車改變車道或者駕乘人員上下車時,如果盲區內有駕乘人員未察覺的車輛,極易引發交通事故,造成財產損失和人員傷亡。盲區監測技術利用傳感器對駕乘人員的視野盲區進行探測,當盲區或接近區域內有車輛時,通過發出報警聲音或者指示燈閃爍提醒駕乘人員,減少交通事故的發生。
盲區監測系統由3個部分組成,分別是信息采集模塊、數據處理模塊和結果輸出模塊。信息采集模塊是利用安裝在后視鏡或后保險杠附近的傳感器采集盲區和附近區域的信息并將采集到的數據發送給數據處理模塊;數據處理模塊運用算法處理采集到的信息,主要包括分析盲區內有無車輛行人和相關對象的信息、需不需要對本車駕乘人員進行報警兩方面的處理結果,將結果發布給信息輸出模塊;信息輸出模塊可以將上述的處理結果通過顯示屏進行輸出或者必要時通過燈光、聲音等對駕乘人員進行報警。
2 國內外關于盲區監測的研究現狀
2.1 國外盲區監測研究現狀
沃爾沃公司研發了盲點信息系統 (Blind Spot Information System),該系統通過兩個仰裝在左右后視鏡上的攝像頭來監測盲區,它的可監測范圍達到10m長,3m寬。自2005年起,該系統已經在XC70、V70等多個車型上進行應用。
奧迪公司研發了側向輔助系統 (Audi Side As-sist),該系統使用毫米波雷達,系統在車速高于60km/h被激活,監測范圍是盲區及后方50m內。當在該范圍內發現車輛后,該系統會向駕乘人員進行報警。
馬自達公司研發了盲區監測系統 (Blind Spot Monitoring),該系統利用安裝在車后保險杠內側的雷達傳感器對盲區和接近區域進行信息采集。當區域內有車輛時,通過車內指示燈對駕駛員進行報警。
2.2 國內盲區監測研究現狀
目前國內對盲區監測的研究主要利用的是攝像頭,通過對視覺信息進行處理,分析盲區及附近區域的環境。
賀咸陽等人利用單目攝像頭,利用圖像處理技術在每幀圖像上提取盲區內車輛車牌并對車輛進行跟蹤,再利用投影幾何理論結合圖片信息實現對后方車輛進行距離估算。吳婉穎等人利用Harris角點提取圖像中的特征來檢測車輛,并利用光流法進行兩幀圖像間的特征進行跟蹤,在車輛跟蹤方面提高了效率。
但是,視覺領域相關算法需要更高的計算性能,由于車載計算機的處理性能有限,會降低盲區監測系統的準確性和實時性。
3 盲區監測的技術原理
盲區監測主要是通過車上安裝在前后保險杠及左右后視鏡的傳感器來進行環境信息采集,針對不同的傳感器數據采用各自領域的算法進行處理,讓系統把握準確的環境信息。系統通過對不同環境做出判斷,來決定是否向駕乘人員報警。系統的關鍵部分在于能利用傳感器數據對環境進行準確的分析,達到能夠區分車輛的數量,以及每輛汽車相對于本車的一些距離信息和速度信息,達到環境的準確把控。
目前,車載傳感器主要包括激光雷達、紅外相機、攝像頭和微波雷達等。這些傳感器都具有各自的特點。在這些傳感器中,激光雷達得到的數據精度較高,但價格相對更高,而且會受到天氣的影響,在霧霾、大雨等情況下,探測指標會顯著下降。紅外線相機能夠根據物體的紅外特征,呈現出物體的輪廓,但是受溫度影響很大,在惡劣天氣下效果不佳。攝像頭能得到的信息更多,但是受環境光照影響嚴重,而且一些視覺處理算法需要較高的算力來確保實時性。微波雷達的探測距離相比較遠,且具備一定的測距、測速精度,不受天氣影響,價格不高。所以,微波雷達在盲區監測系統中應用得更多。下面,本文將對FMCW體制、FSK體制的雷達系統的測距、測速原理進行介紹。
3.1 FMCW體制
FMCW (調頻連續波)的雷達結構如圖1所示,通過控制壓控振蕩器 (VCO)的輸入電壓 線性變化,使發射信號的頻率是線性變化,與接收的回波信號經過混頻器之后,能夠得到中段頻率信號,能夠從該信號中解出目標的距離、速度信息。一般,FMCW的調制方法包括固定斜率三角波調制、變斜率三角波調制、快諧波序列調制,下面對快諧波序列調制的求解進行介紹。目標對象的相對距離。目標的運動速度需要通過nT時間內發射的所有鋸齒波的回波信號共同計算。根據所有發射鋸齒波的中頻回波信號的快速傅里葉變換結果,在距離維度上再做一次n點的快速傅里葉變換,根據得到的二維結果求出多普勒頻移fv,進而求出相對速度。
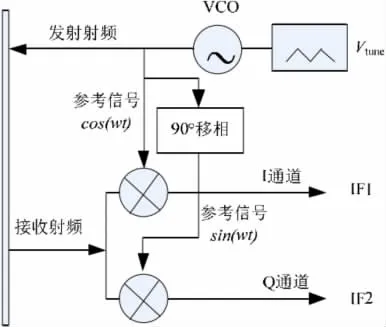
圖1 FMCW體制的雷達結構示意圖
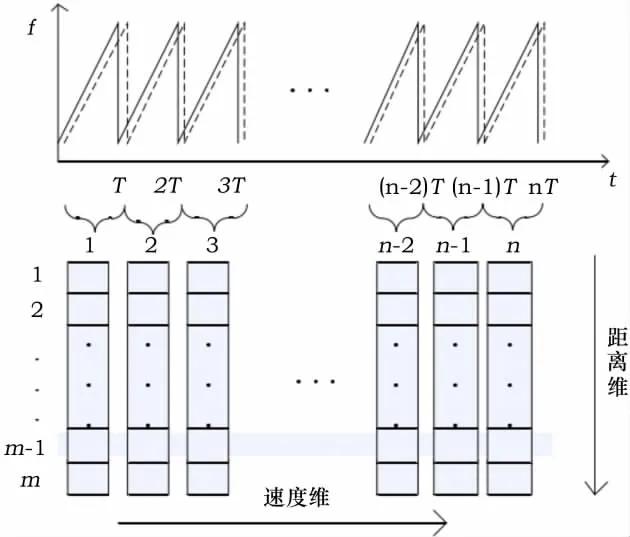
圖2 快諧波序列調制
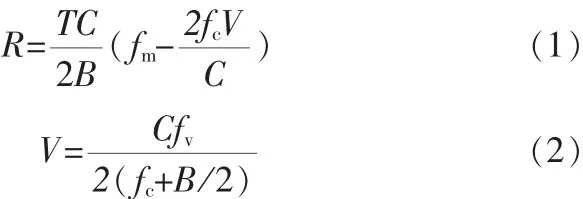
式中:fc——發射信號的中心頻率;B——調制帶寬;T——一個鋸齒波調制周期;C——電磁波在空氣中的傳播速度。
3.2 FSK體制
FSK(頻移鍵控)體制的雷達能夠在一個周期內發布多種不同頻率的電磁波,經過混頻之后得到中頻信號,之后便可根據公式算出目標的距離、速度信息。常見的調制方式有2FSK、MFSK。本文主要介紹一下2FSK。
該調制方式發射兩種不同頻率的電磁波,利用兩種回波的相位差求解,兩種電磁波頻率分為fA、fB,2FSK調制如圖3所示。
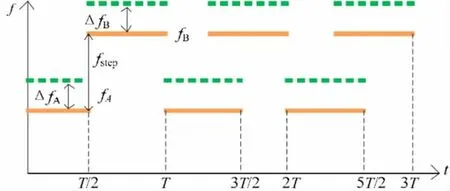
圖3 2FSK調制
快諧波序列調制是通過雷達發射N個大斜率短周期的鋸齒波,周期為T,快諧波序列調制如圖2所示。
對每個調制鋸齒波內的中頻信號作m點的快速傅里葉變換,變換結果可以得到差頻頻率fm。根據該頻率可以計算出
兩種回波信號的頻率之差為fstep。
多普勒頻移ΔfA與ΔfB均包含速度信息,

對一個發射周期內的回波進行變頻處理后,再進行譜分析,就可以得到回波信號的多普勒頻移ΔfA對應的相位為φA=2πfAτ,ΔfB對應的相位為φB=2πfBτ,把τ=2R/C帶入可知,

令φB-φ=Δφ,則可知,最大無模糊距離對應Δφ的取值范圍為[0 2π],FSK體制的雷達可以如上所示,根據多普勒頻移測量目標速度。
4 盲區監測系統測試標準
目前針對盲區監測的測試標準法規主要來源于ISO 17387,測試的工況比較單一,與實際交通環境相差較大。
ISO-17387-2008標準對盲區監測系統主要有4類測試工況,分別是直線超車 (其中包括超車和被超車兩種場景)、目標車橫向靠近、預警。該標準中將相對縱向距離較短、相對車速較小的被超車盲區預警稱為盲點警告功能 (Blind Spot Warning,BSW);將相對縱向距離較大、相對車速較大的被超車盲區預警稱為靠近車輛預警功能 (Closing Vehicle Warning,CVW)。
4.1 直線超車測試
待檢測車輛與測試車輛處在相鄰車道,待檢測車輛與測試車輛用一定的相對速度分別完成兩車相互超車的場景,如果測試車輛開始報警點、結束報警點均滿足標準,則試驗通過。
4.2 目標車橫向靠近測試
待檢測車輛處于測試車輛的后方,縱向方向位于測試車輛的盲區內,待檢測車輛從與測試車輛相隔一個車道橫向靠近測試車輛,在兩車縱向中心線重合后待檢測車輛遠離檢測車輛。如果測試車輛開始報警點、結束報警點均滿足標準,則試驗通過。
4.3 橫向預警
待檢測車輛在測試車輛左側/右側橫向盲區外,待檢測車輛與測試車輛以一定的相對速度分別兩車相互超車的場景,若測試車輛全程未發生報警,則試驗通過。
5 結語
當前,由于車輛盲區造成的交通事故占了很大比例,由此造成了大量死亡人數和財產損失,所以發展和研究車輛盲區監測系統就變得尤為重要。當前車輛盲區監測系統大多數只依靠單一的傳感器進行環境感知,攝像頭或雷達,由于傳感器自身的限制,車輛盲區監測系統還存在著一些問題。隨著傳感器技術和相關處理算法的發展和進步,盲區監測系統會進一步提高實時性和準確性,能夠對盲區內多個目標進行精確的掌握。
智能網聯汽車是近年來汽車行業和互聯網行業研究的熱點,而車輛盲區監測是無人駕駛的一個重要組成部分,該系統如果能夠對盲區附近環境進行精準實時的掌握,會極大提高車輛行駛的安全性。車輛盲區監測系統的發展,為以后無人駕駛汽車的普及打下了堅實的基礎。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
