考慮操縱穩定性的適時四驅扭矩分配策略
2020-06-02 01:19:56王敷玟凌新新張家彬陳強
汽車零部件 2020年5期
關鍵詞:分配
王敷玟,凌新新,張家彬,陳強
(廣州汽車集團股份有限公司汽車工程研究院,廣東廣州 511434)
0 引言
橫擺運動穩定性是決定高速汽車安全行駛的一個主要性能,被稱為“高速車輛的生命線”,四輪轉向技術、主動懸架技術、直接橫擺力矩控制技術是改善車輛穩定性最主要的幾個方法。而直接橫擺力矩控制,通過改變輪胎縱向力,產生一橫擺力矩來改變車輛橫擺角速度,使車輛迅速達到穩定狀態是目前車輛穩定性控制中是最有效、應用最為廣泛的方法[1-4]。
適時四驅系統是一種主動控制系統,它通過四驅控制器控制四驅后橋扭矩輸出。根據ECU判斷邏輯,可將車輛驅動模式分為兩輪驅動、適時四輪驅動、全時四輪驅動。目前國內適時四驅系統的扭矩分配主要由車速、轉向角及車輪打滑程度來確定,而未考慮整車操縱穩定性的需求,然而在低附路面,汽車在轉向和側向風作用時,側向力常常接近附著極限或達到飽和狀態,車輛的轉向特性發生明顯改變,從而出現側滑、激轉、側翻或轉向遲鈍等喪失車輛動力學穩定性的危險局面。針對適時四驅扭矩分配考慮操縱穩定性的問題,文獻[5]中日產公司研制了總是保持“中性轉向”特點的電子控制前、后驅動力分配系統(ETS),在固定方向盤轉角加速行駛時,有ETS的4WD具有接近中性轉向的特點,使駕駛者容易判斷其行駛路徑,具有較好的操縱穩定性。文獻[6]中基于一種智能扭矩控制耦合器(ITCC),根據其扭矩傳遞特性,制定了同時考慮驅動性能及操縱穩定性能的多種MAP扭矩分配策略,并以全油門加速轉彎工況為例,實現將車輛的轉向特性由“過度轉向”向不足轉向轉變。文獻[7]中基于一種純電動四驅驅動汽車,設計了基于遺傳算法和PID控制的軸間扭矩分配控制系統,使車輛動力性和行駛穩定性得到提升。文獻[8]中采用軸載比例分配算法,設計了基于橫擺角速度與質心側偏角的聯合滑模變結構控制策略,實現了車輛的橫向穩定性控制。
本文作者依據智能適時四驅系統車輛的特點,提出一種考慮車輛操縱穩定性的四驅扭矩分配規則,充分利用后軸的附著條件,采用PID控制理論,對車輪打滑和橫擺角速度偏差進行聯合控制,提升車輛的越野脫困能力及提升車輛在低附路面的操縱穩定性。
1 系統結構簡介
如圖1所示,采用的四驅系統為一種主動控制的智能適時四驅系統,它主要由取力器總成、中間傳動軸、電控多片離合器、后差減速器總成等組成。
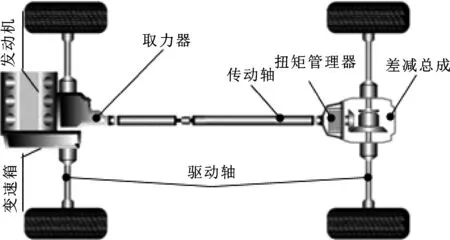
圖1 四驅系統拓撲結構簡圖
發動機的動力經過變速箱再經取力器總成增速降扭后將動力傳至中間傳動軸,再通過電控多片離合器片調節內部電磁銜鐵控制中間傳動軸輸出扭矩,最后通過后差減速器總成減速增扭后由后驅動軸將動力傳至車輪,從而輔助驅動汽車行駛。
根據圖1所示的四驅系統拓撲結構,忽略差速器內部阻力,忽略驅動軸、差速器、傳動軸等轉動慣量,力學關系為變速箱輸出端被動齒輪輸出扭矩:
Ttran=η1KiioTeng
(1)
后橋總輸出扭矩:
Tr=ηrirTmm_act
(2)
后橋車輪輸出扭矩:
(3)
前橋輸出扭矩:
Tf=Ttran-Tr
(4)
前橋車輪輸出扭矩:
(5)
式中:Ttran為變速箱被動齒輪總輸出扭矩,N·m;η1為變速箱傳動效率;i為變速箱速比;io為變速箱主減速器速比;K為液力變矩器變矩比;Teng為發動機輸出扭矩,N·m;Tr為后橋總輸出扭矩,N·m;ηr為扭矩管理器和后差減速器綜合傳動效率;Tmm_act為扭矩管理器實際扭矩,N·m;ir為后差減速器速比;Trl為左后輪輸出扭矩,N·m;Tφrl為左后輪附著扭矩,N·m;Trr為右后輪輸出扭矩,N·m;Tf為前橋總輸出扭矩,N·m;Tfl為左前輪輸出扭矩,N·m;Tφfl為左前輪附著扭矩,N·m;Tfr為右前輪輸出扭矩,N·m;Tφfr為右前輪附著扭矩,N·m。
2 適時四驅整車模型的建立
2.1 車輛模型
汽車是由駕駛員通過油門踏板、制動踏板和轉向盤來控制的,其行駛狀態主要由汽車的縱向速度、側向速度和橫擺角速度決定。由于線性二自由度模型可以很好地反映駕駛員的轉向輸入與汽車橫擺角速度、側偏角、側向加速度之間的線性關系,被廣泛用來計算汽車的橫擺角速度和質心側偏角等控制變量名義值。線性二自由度模型[1]如圖2所示。
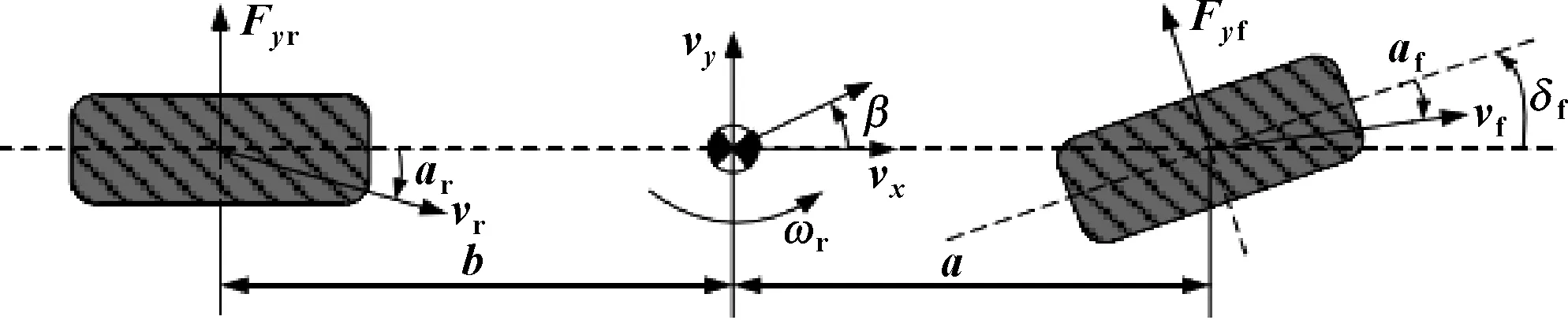
圖2 線性二自由度汽車模型
(6)
(7)
考慮路面附著系數的限制,其質心側偏角與橫擺角速度需滿足如下約束條件:
(8)
式中:k1、k2分別為前、后輪輪胎側偏剛度;μ為路面附著系數;ωrd為名義橫擺角速度,rad/s;βd為名義質心側偏角,(°)。
2.2 輪胎模型
由于文中分析主要涉及縱向和側向附著力,故采用Dugoff輪胎模型計算輪胎與地面的縱向、側向附著力[9]。
驅動輪滑轉率為
(9)
地面給車輪的驅動力為
(10)
式中:ω為車輪輪速;r為輪胎動態半徑;Fxxi、Fyyi分別為輪胎的縱向、側向附著力;Cxi、Cyi分別為輪胎縱向、側向剛度;φi、sxi分別為各驅動輪輪胎側偏角及縱向滑移率;f(s)為與輪胎動態參數有關的函數。
2.3 四驅扭矩控制模型
文中采用的四驅扭矩管理器為電磁多片式離合器結構,在給扭矩管理器發出扭矩請求信號后,扭矩管理器不能馬上完成所需動作,到達穩態須經歷一個動態過程,具有一定的延遲。根據臺架及整車測試結果,采用2階傳遞函數來模擬扭矩管理器實際的扭矩響應,如下:
(11)
Tmm_Cac=KnI2
(12)
式中:Tmm_act為扭矩管理器實際輸出轉矩,N·m;ξ為二階系統阻尼比;ωn為扭矩管理器固有頻率,rad/s;Tmm_Cac為扭矩管理器的目標轉矩,N·m;Kn為由電磁線圈、凸輪盤、離合器片等決定的結構特性參數,為扭矩系列扭矩管理器的固有特性;I為電磁線圈電流,A。
3 智能扭矩分配策略
在直線行駛中,車輛主要根據各車輪的滑轉情況實時調配驅動力以最大化利用路面附著,在保證扭矩管理器結合平順、斷開平穩的前提下,以軸間轉速差為零作為期望控制目標,對四驅扭矩進行控制,從而提高整車的動力性和通過性。
由扭矩管理器控制模型可知,扭矩管理器通過控制電磁線圈電流來控制目標扭矩輸出,因此,整車扭矩管理器輸入、輸出端轉速差為
Δn=nf-nr
(13)
則有控制器輸出的電流變化量為
(14)
式中:Δn為前后軸軸速差,r/min;nf為前軸軸速,r/min;nr為后軸軸速,r/min;kp、ki、kd分別為比例、積分和微分增益系數。
在評價扭矩管理器是否結合平順、斷開平穩時,以沖擊度作為評價指標,縱向加速度a的變化率即沖擊度:
(15)
在轉向行駛時,既要考慮整車動力性的需求,又要滿足車輛對于橫擺力矩的要求。以車輛的操縱穩定性作為首要考慮對象,正確合理的驅動力轉移能夠使車輛更好地保持駕駛者的期望軌跡,約束如下:
Fxx1+Fxx2+Fxx3+Fxx4=maxc
(16)
(Fxx2-Fxx1)a+(Fxx4-Fxx3)b=Mz
(17)
(18)
上層控制器以理想的橫擺角速度跟隨為控制目標,利用PID控制策略得出車輛所需的橫擺力矩,它通過期望橫擺角速度同實際橫擺角速度的偏差得到車輛的調整橫擺力矩。
以穩態橫擺角速度值作為ωrd的控制目標:
(19)

整車橫擺角速度偏差為
Δω=ω-ωrd
采用PID控制橫擺角速度跟隨控制,如下:
(20)
式中:kpω、kiω、kdω分別為比例、積分和微分增益系數;Kω為橫擺角速度-需求扭矩-目標電流轉化因子。
此外,在考慮以上智能扭矩分配策略時,還需考慮策略與整車其他性能,如NVH性能、轉向干涉等的匹配等。
4 整車標定測試
為了驗證智能扭矩分配策略的有效性,同時對算法進行標定優化,以某款中大型SUV為研究對象,將制定的智能扭矩分配策略移植到控制器中,在標準雪地廣場開展動力性及操縱穩定性試驗,并以雪地直線加速、蛇行及轉彎加速工況為例驗證考慮操縱穩定性的適時四驅扭矩分配策略的有效性。圖3為裝有V-Box的汽車性能測試圖片。

圖3 整車標定測試
4.1 直線行駛工況
首先在雪直道上進行原地起步全油門加速試驗,由于受前輪附著的影響,車輛在加速時,車輛前輪存在一定程度打滑,最大可達217 r/min。為了充分利用附著力,保證車輛保持最小滑移率,控制器通過控制扭矩管理器電流對后軸施加一定的后橋扭矩。施加扭矩控制后,如圖4所示,車輛百公里加速時間由17.63 s提升為15.4 s。如圖5所示,施加控制前后車輛前后軸最大轉速差由217 r/min減小為116 r/min,車輛的打滑率降低及動力性明顯提升。文中車輛不能完全抑制打滑的主要原因為車輛加速時軸荷轉移、后橋輸出四驅扭矩占比及整車NVH的限制。
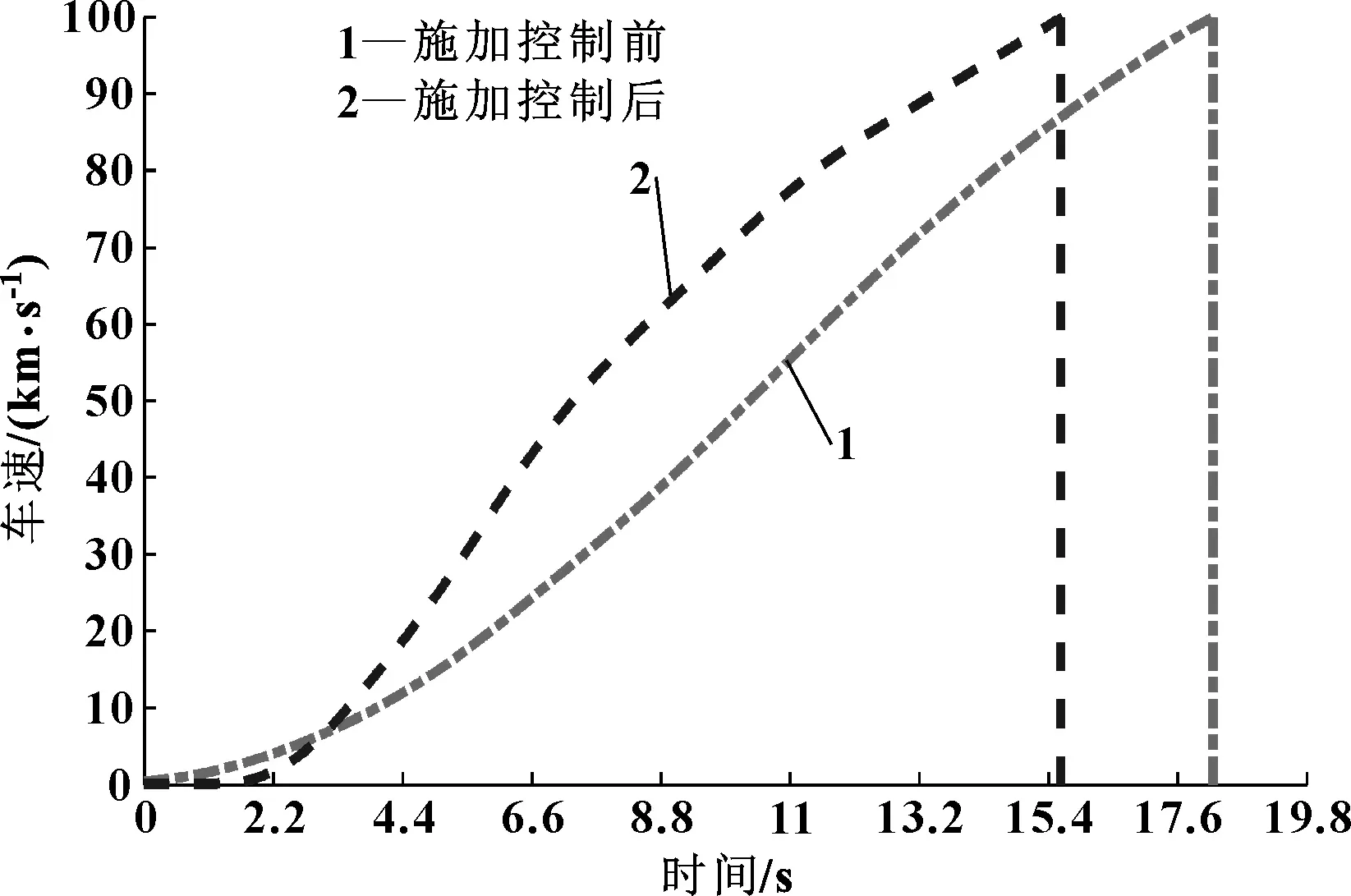
圖4 施加控制前后百公里加速時間對比
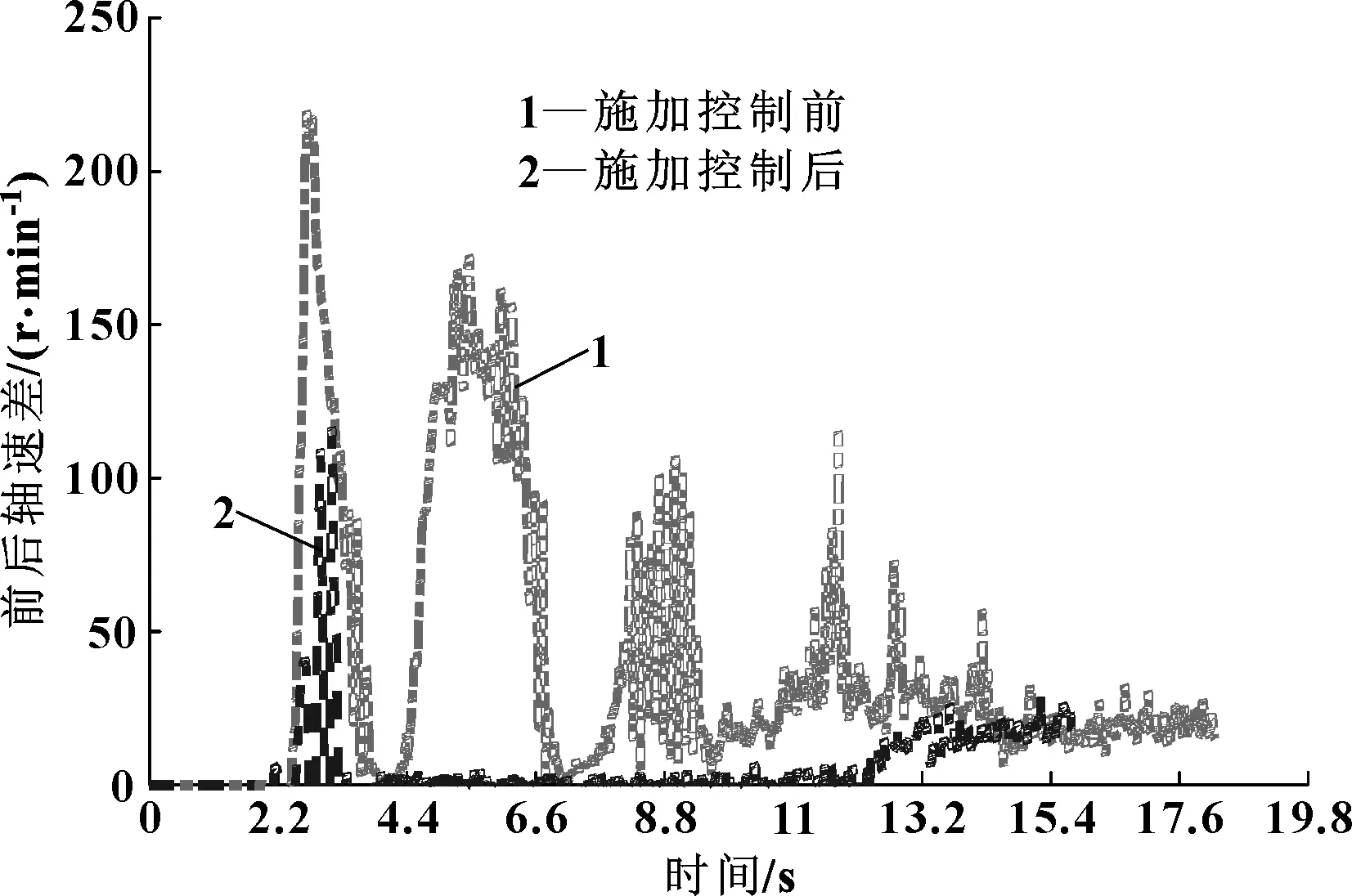
圖5 施加控制前后前后軸速差對比
圖6所示結合圖4車速信號,可見施加控制后,四驅在車速小于70 km/h時均存在一定的四驅控制電流,以抑制車輪打滑,保證一定的動力輸出,但在車速大于70 km/h時四驅電流較小,此時車輪打滑情況與施加控制前相當,向無扭矩控制時靠攏,70 km/h以上,四驅電流較小主要是考慮整車NVH性能。
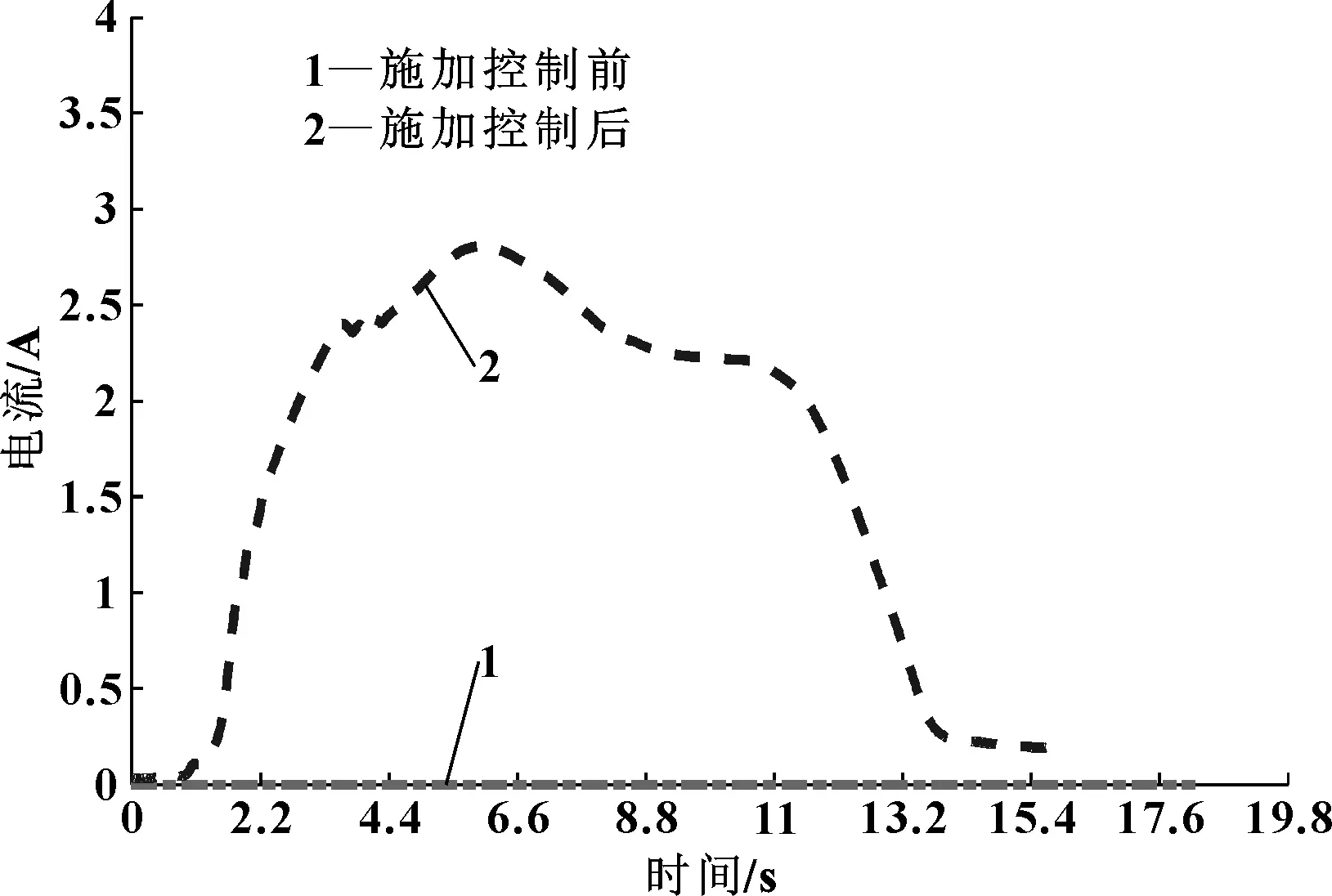
圖6 施加控制前后前四驅控制器電流對比
在車輛加速時,由于要抑制車輪打滑,扭矩管理器需要迅速結合,扭矩管理器的迅速動作將給整車乘車舒適性產生不利影響,如圖7所示,施加控制后整車的沖擊度由施加控制前的峰值1.6 m/s3升為峰值5.1 m/s3(但仍然小于德國制定的沖擊度上限值10 m/s3),沖擊度峰值雖然增加,但主客觀均表明,考慮沖擊度的智能扭矩分配策略不會對整車乘坐舒適性產生明顯不利影響。
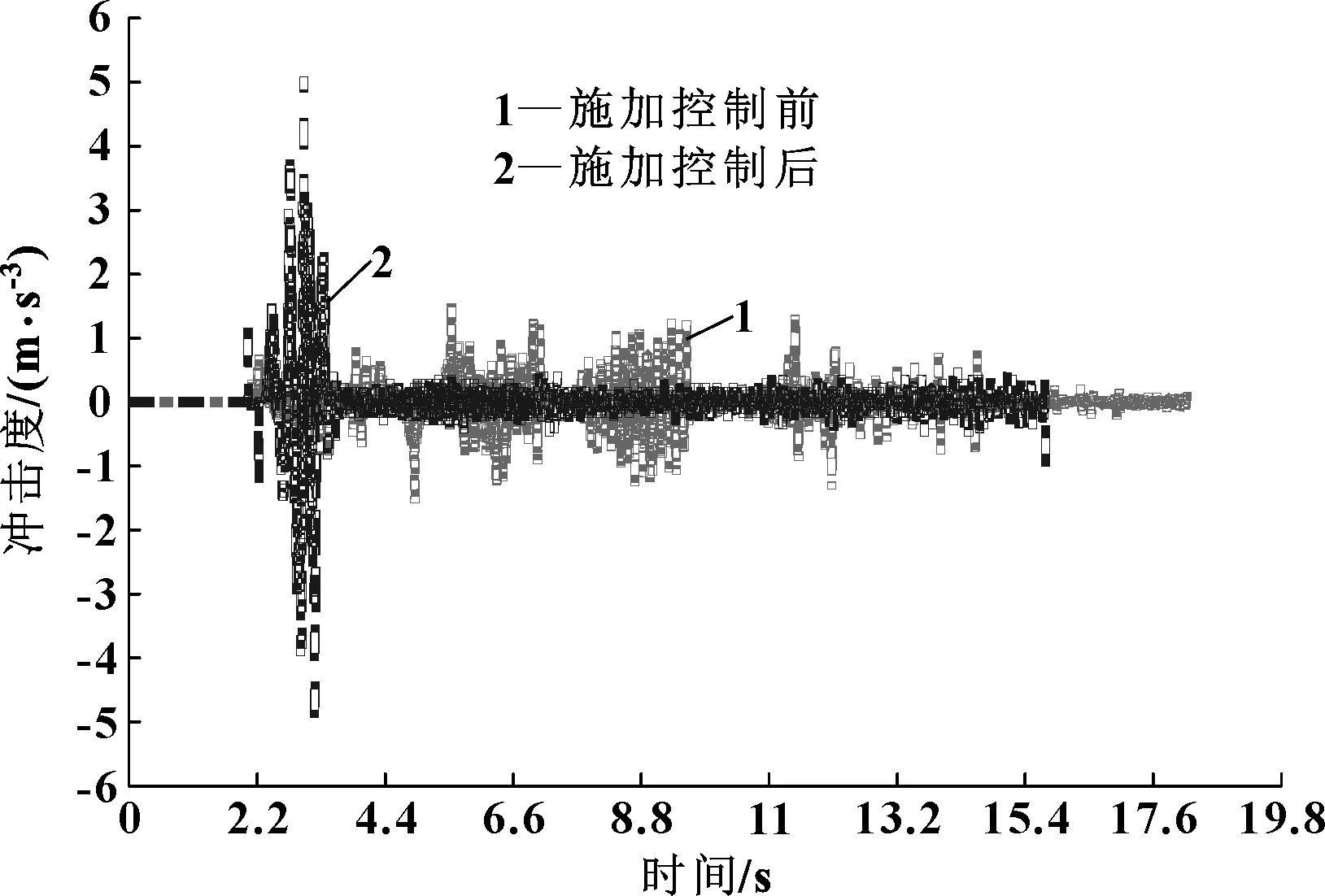
圖7 施加控制前后整車沖擊度對比
4.2 雪地轉向行駛工況
雪地轉向行駛時,兩輪驅動汽車往往由于所需要的縱向動力性較大,而導致前輪不能提供足夠的轉向力滿足轉向需求,使車輛表現為嚴重的不足轉向,而適時四輪汽車在考慮操縱穩定時,當監測到車輛不能按希望的軌跡行駛時,四驅控制器可以控制扭矩管理器以一定的后橋扭矩輸出來改善車輛前輪驅動這種不足轉向現象,提升車輛操縱穩定性。文中以車速穩定的蛇行工況及車速劇烈增加的轉彎加速行駛工況為例進行實車測試。
4.2.1 蛇行工況
在雪廣場上,以整車車速50 km/h的蛇形工況為例進行操縱穩定性標定試驗。
如圖8所示:考慮操縱穩定性控制策略施加前,車輛在t=6.4 s左右最大橫擺加速度達到3.36 rad/s,與目標橫擺加速度的最大差值為1.54 rad/s,車輛具有較為明顯的不轉向趨勢。如圖9所示:在施加操縱穩定性策略后,車輛的最大橫擺角速度為2.72 rad/s,與目標橫擺角速度的最大差值為0.96 rad/s。可見施加考慮操縱穩定性的智能扭矩分配策略后,四驅操縱穩定性有一定提升。
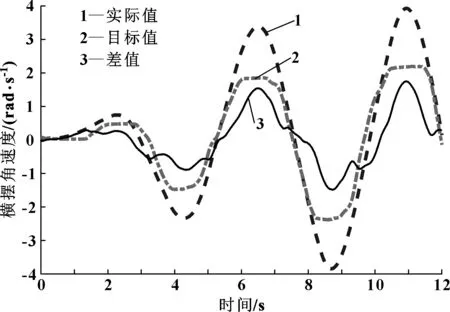
圖8 考慮操穩控制前橫擺角速度變化

圖9 考慮操穩控制后橫擺角速度變化
如圖10所示:由于車輛以50 km/h車速穩定行駛,并不涉及車輪打滑,故考慮操縱穩定性策略施加前四驅控制器不施加目標扭矩;但當考慮操縱穩定性控制策略后,四驅控制器根據操縱穩定性需要,按需提供給扭矩管理器一定電流,保證車輛具有一定的后橋扭矩輸出,改變車輛操穩特性。
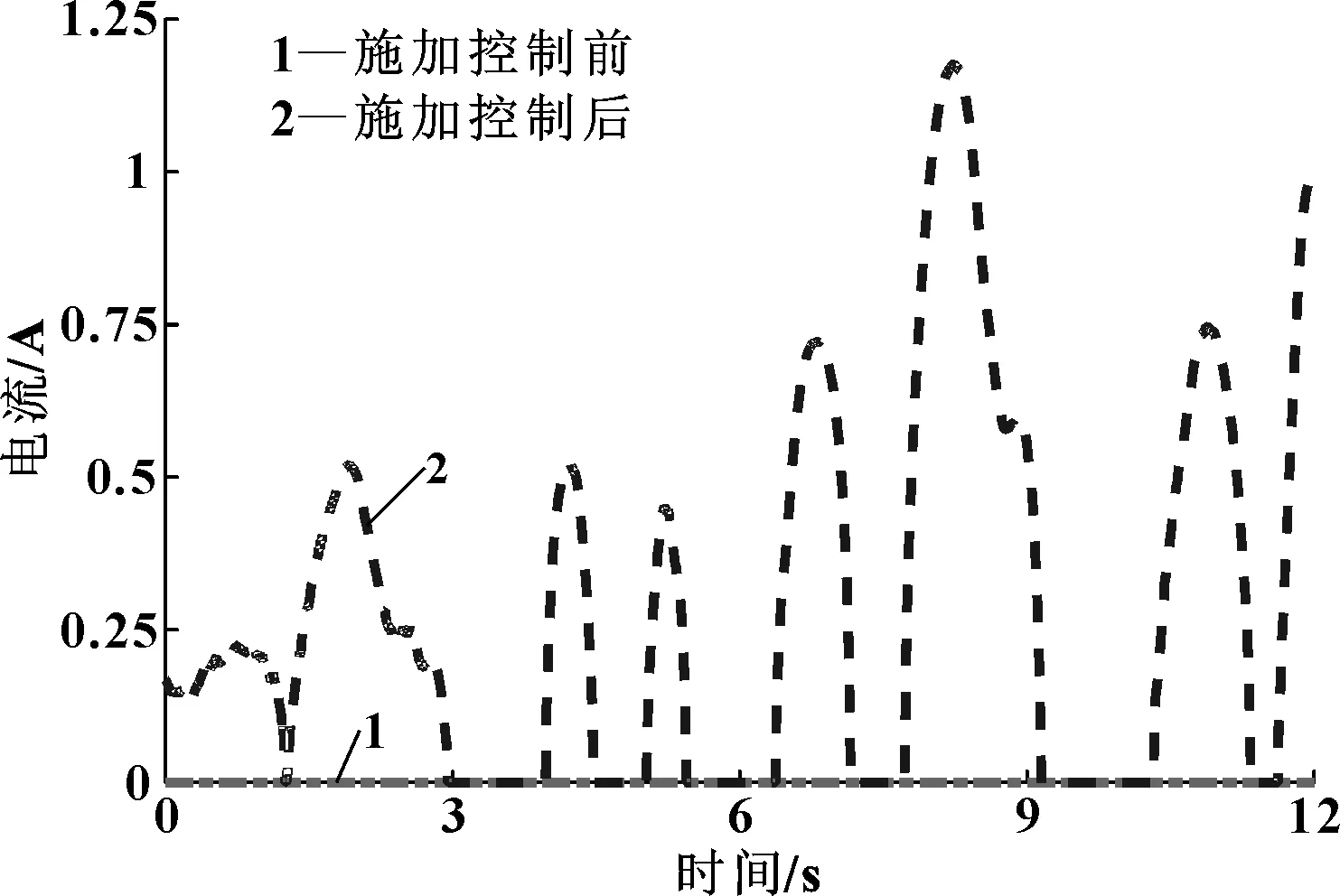
圖10 考慮操穩控制前后四驅控制器電流對比
4.2.2 轉彎加速工況
在雪廣場上,調整方向盤轉角至90°,穩定車輛速度至30 km/h,然后全油門加速,直至車輛失穩,主要評估車輛極限穩定能力。
如圖11所示:在雪廣場急轉彎工況下,不考慮操縱穩定性控制時,由于前輪需要足夠的縱向驅動力保證車輛加速度,導致車輛側向動力學較差,整車橫擺角速度明顯大于目標橫擺角速度,最大橫擺角速度達7.8 rad/s,車輛呈現出明顯的不足轉向特性,此時的四驅扭矩輸出主要用來抑制車輪打滑。施加控制后,為了改善車輛失穩的趨勢,四驅控制器根據車輛實際橫擺角速度與估算目標橫擺角速度的差異,同時通過圖12所示的控制器電流,對預施加一定的目標扭矩,最大限度、最迅速傳遞保證后橋扭矩輸出,此時最大橫擺角速度差值為1.3 rad/s,對操縱穩定性有一定改善,但車輛仍然無法完全跟隨目標橫擺角速度,表明通過橋間直接橫擺力矩控制可改善車輛的操縱穩定性,但與輪間直接橫擺力矩控制效果存在差距。
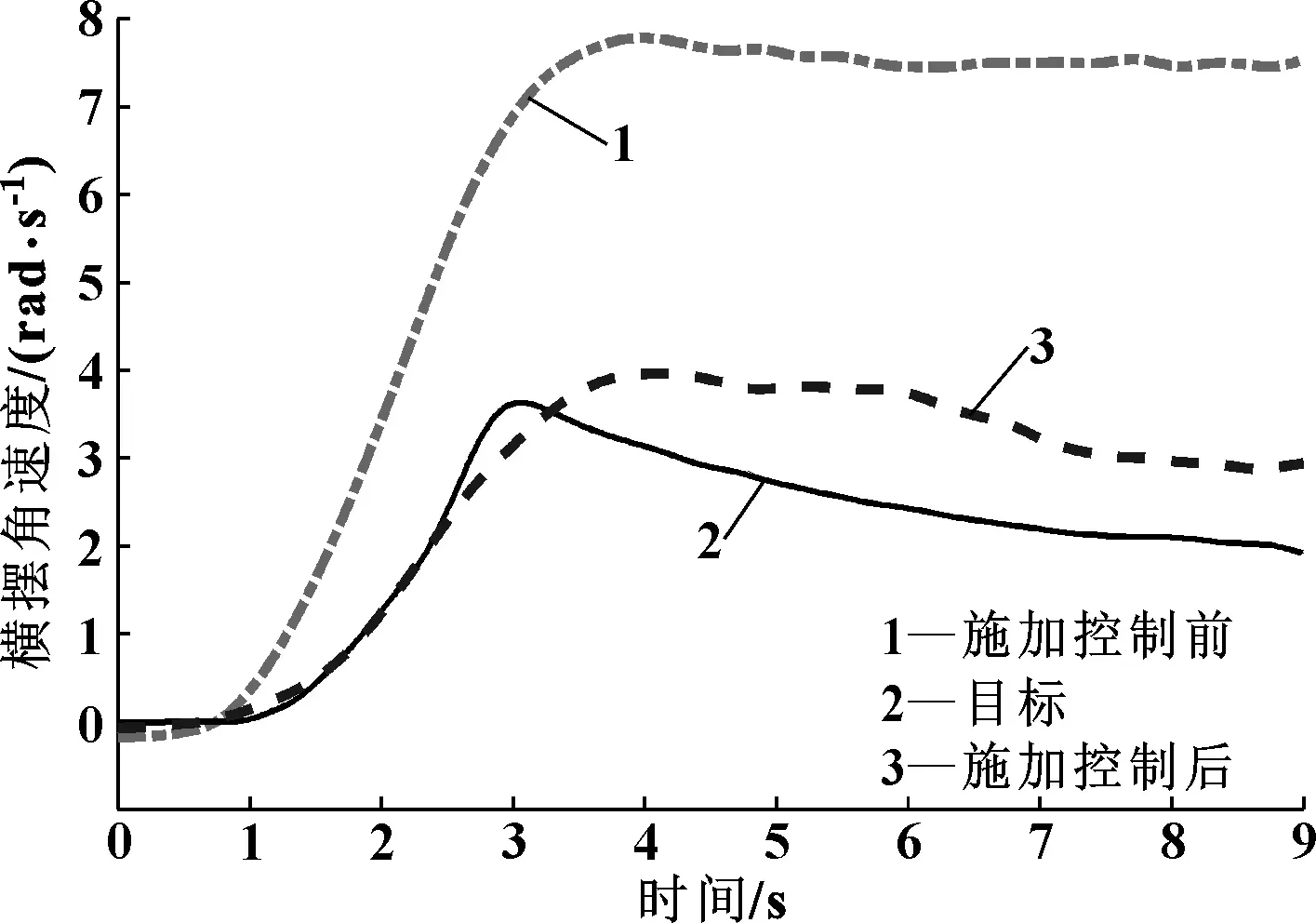
圖11 操穩控制策略施加前后的橫擺角速度變化
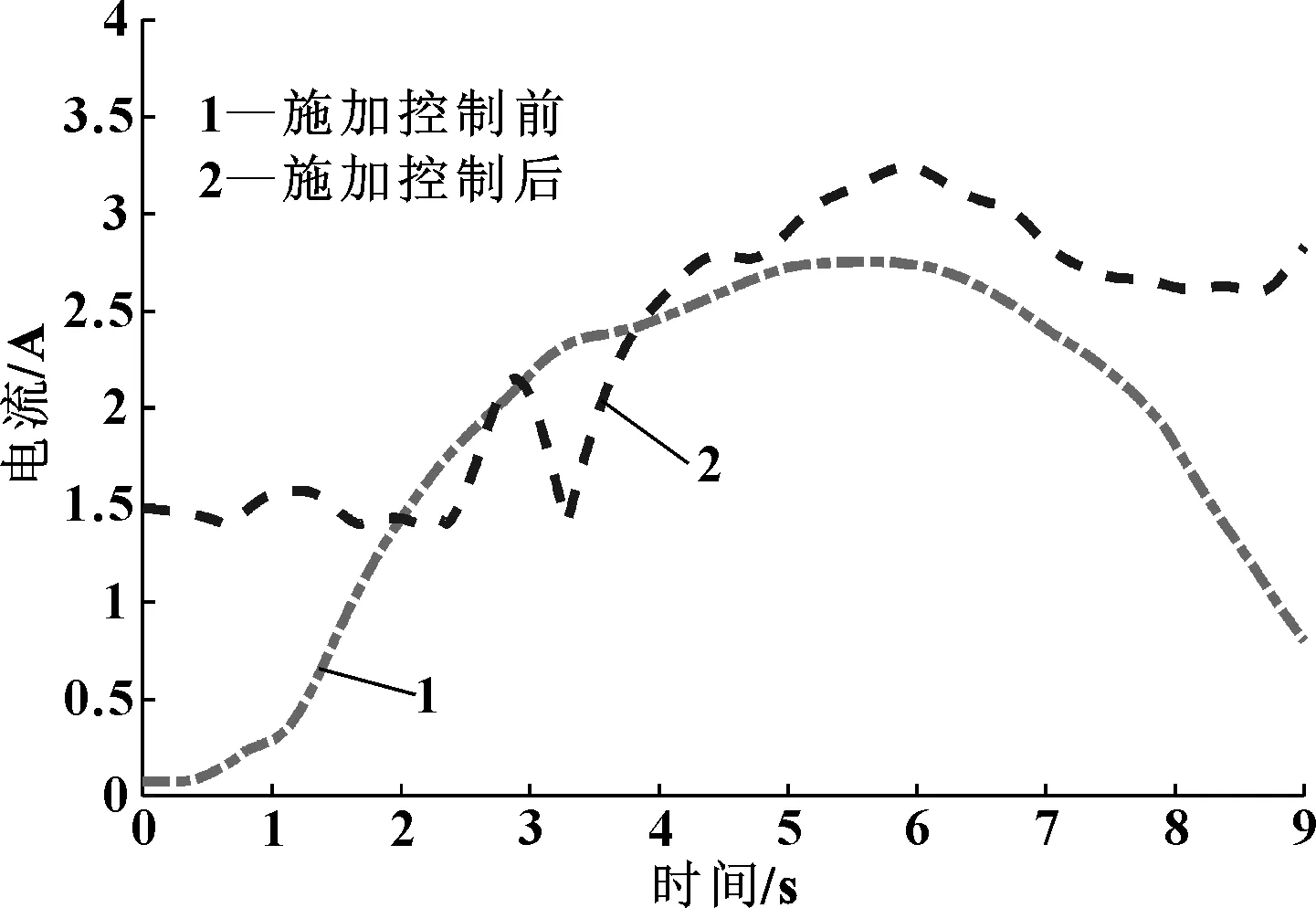
圖12 操穩控制策略施加前后電流變化
5 結論
利用PID控制,提出以橫擺角速度跟隨及最小滑移率為控制變量的適時四驅扭矩分配策略,通過實車試驗得到如下結論:
(1)該智能四驅控制策略在兼顧動力性的同時,充分利用后軸富余的附著條件,通過前后軸產生的直接橫擺力矩控制可以提高彎道行駛能力,進一步提高汽車的操縱穩定性;
(2)所設計的考慮操縱穩定性的智能扭矩分配不會因為產生突然的縱向加速度而影響駕駛舒適性,同時兼顧整車NVH性能;
(3)相比于通過車輪制動力改善四驅車輛操作穩定性,通過四驅改善操縱穩定性效果稍弱。但通過后橋輔助驅動這種避免制動的方式來提升整車操縱穩定性,有利于整車燃油經濟性及避免整車因ESP過早介入導致的動力丟失。
猜你喜歡
天水行政學院學報(2022年4期)2022-11-18 09:02:36
艦船科學技術(2022年13期)2022-08-11 09:30:02
鐵道通信信號(2020年9期)2020-02-06 09:15:22
漢語世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
中學生數理化·中考版(2018年10期)2018-12-07 00:44:52
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
中央社會主義學院學報(2017年1期)2017-04-16 05:34:07
中國衛生(2014年12期)2014-11-12 13:12:40