潛艇X舵控制分配器設(shè)計(jì)和仿真
2020-05-28 06:34:44商建朋李文魁黃躍鵬
中國(guó)艦船研究 2020年2期
關(guān)鍵詞:分配
商建朋,李文魁*,黃躍鵬
1 海軍工程大學(xué) 電氣工程學(xué)院,湖北 武漢 430033
2 中國(guó)人民解放軍東部戰(zhàn)區(qū) 海軍保障部,浙江 寧波 315122
0 引 言
潛艇艉舵目前主要有2種布置方式:一種是十字形(含H形和木字形),另一種是X形。相對(duì)于十字形舵(以下稱(chēng)“十字舵”),X形舵(以下稱(chēng)“X舵”)的操縱性、安全性得到了提升,并被廣泛應(yīng)用于潛艇艉舵的設(shè)計(jì),例如瑞典的“哥特蘭”級(jí)、澳大利亞的“科林斯”級(jí)、德國(guó)的212A型、日本的“蒼龍”級(jí)常規(guī)潛艇,以及法國(guó)的“梭魚(yú)”級(jí)攻擊核潛艇、美國(guó)在建的最新型“哥倫比亞”級(jí)戰(zhàn)略核潛艇等。然而,X舵也面臨著諸如人工操舵不直觀等主要問(wèn)題。對(duì)于X舵操縱控制系統(tǒng)而言,計(jì)算機(jī)自動(dòng)控制是其主要模式,所以設(shè)計(jì)高性能、高可靠性的操縱控制算法尤為重要。
在X舵潛艇運(yùn)動(dòng)建模方面,胡坤等[1]建立了X 舵與十字舵舵角轉(zhuǎn)換數(shù)學(xué)模型,開(kāi)展了等效舵角轉(zhuǎn)換裝置的仿真驗(yàn)證。在X舵控制算法方面,曾俊寶[2]以AUV為對(duì)象,研究了對(duì)角聯(lián)動(dòng)方式下的X舵PID控制,并進(jìn)行了湖上及海上試驗(yàn),但其主控制器采用的是PID控制算法,分配方式為對(duì)角聯(lián)動(dòng),未考慮三舵、雙舵情況下的分配問(wèn)題;Zhang等[3]在傳統(tǒng)十字舵AUV控制結(jié)構(gòu)中引入舵角分配器,基于重構(gòu)方法研究了X舵的容錯(cuò)控制分配問(wèn)題。此外,還有學(xué)者基于偽逆法深入研究了多舵面控制分配算法[4-5]。偽逆法的優(yōu)點(diǎn)在于計(jì)算比較簡(jiǎn)單且不用考慮操縱機(jī)構(gòu)的約束條件。然而在實(shí)際應(yīng)用中,偽逆法難以求解受約束的控制分配問(wèn)題。
針對(duì)潛艇X舵的控制分配問(wèn)題,本文將采用“主控制器—控制分配器”級(jí)聯(lián)控制結(jié)構(gòu)的操舵系統(tǒng)和成熟算法的主控制器,在考慮舵機(jī)受到舵速限幅和舵角限幅的條件下,選用加權(quán)最小二乘法(Weighted least squares,WLS)設(shè)計(jì)潛艇X舵的控制分配器,以實(shí)現(xiàn)多舵面控制分配,并通過(guò)仿真試驗(yàn),驗(yàn)證不同可用舵面下的操舵控制效果,用以為實(shí)際工程應(yīng)用提供一定的參考。
1 X舵潛艇操縱運(yùn)動(dòng)建模
本文建模采用的坐標(biāo)系、名詞術(shù)語(yǔ)、符號(hào)規(guī)則均來(lái)源于ITTC和SNAME術(shù)語(yǔ)公報(bào)推薦的體系[6-7],對(duì)應(yīng)的固定坐標(biāo)系(定系)E-ξηζ和運(yùn)動(dòng)坐標(biāo)系(動(dòng)系)O-xyz如圖1所示。圖中,潛艇受力在動(dòng)系下的各分量分別為:縱向力X、橫向力Y、垂向力Z以及橫傾力矩K、縱傾力矩M和偏航力矩N。
1.1 X舵布局與舵力分析
X舵操縱面一般由舵面和穩(wěn)定翼組成,穩(wěn)定

1.2 X舵潛艇空間操縱運(yùn)動(dòng)模型

2 X舵潛艇操舵控制器基本結(jié)構(gòu)
基于高可靠性要求,許多現(xiàn)代飛行器和水下航行體均采用過(guò)驅(qū)動(dòng)系統(tǒng),其基本特征是控制量維數(shù)大于被控量維數(shù)。過(guò)驅(qū)動(dòng)系統(tǒng)的控制器設(shè)計(jì)常采用“主控制器—控制分配器”級(jí)聯(lián)結(jié)構(gòu),即主
3 X舵控制分配算法


3.1 控制效率陣分析

3.2 控制分配算法

4 仿真驗(yàn)證
4.1 定深旋回仿真

仿真結(jié)果表明:四舵及三舵配置下均采用對(duì)角聯(lián)動(dòng)操舵,四舵時(shí)舵角平滑無(wú)抖動(dòng),三舵時(shí)舵角略有抖動(dòng),而雙舵時(shí)舵角卻抖動(dòng)明顯(圖4);在3種可用舵面配置下旋回時(shí),潛艇轉(zhuǎn)向平穩(wěn)(圖5和表1);四舵時(shí)橫傾角略有振蕩,三舵時(shí)橫傾峰值最大,但振蕩不明顯,雙舵時(shí)橫傾角振蕩明顯(圖6和表1)。由此可見(jiàn),隨著操舵面的減少,潛艇的操縱性能逐漸下降,橫傾振蕩和舵角抖動(dòng)趨于嚴(yán)重。
4.2 潛浮運(yùn)動(dòng)仿真

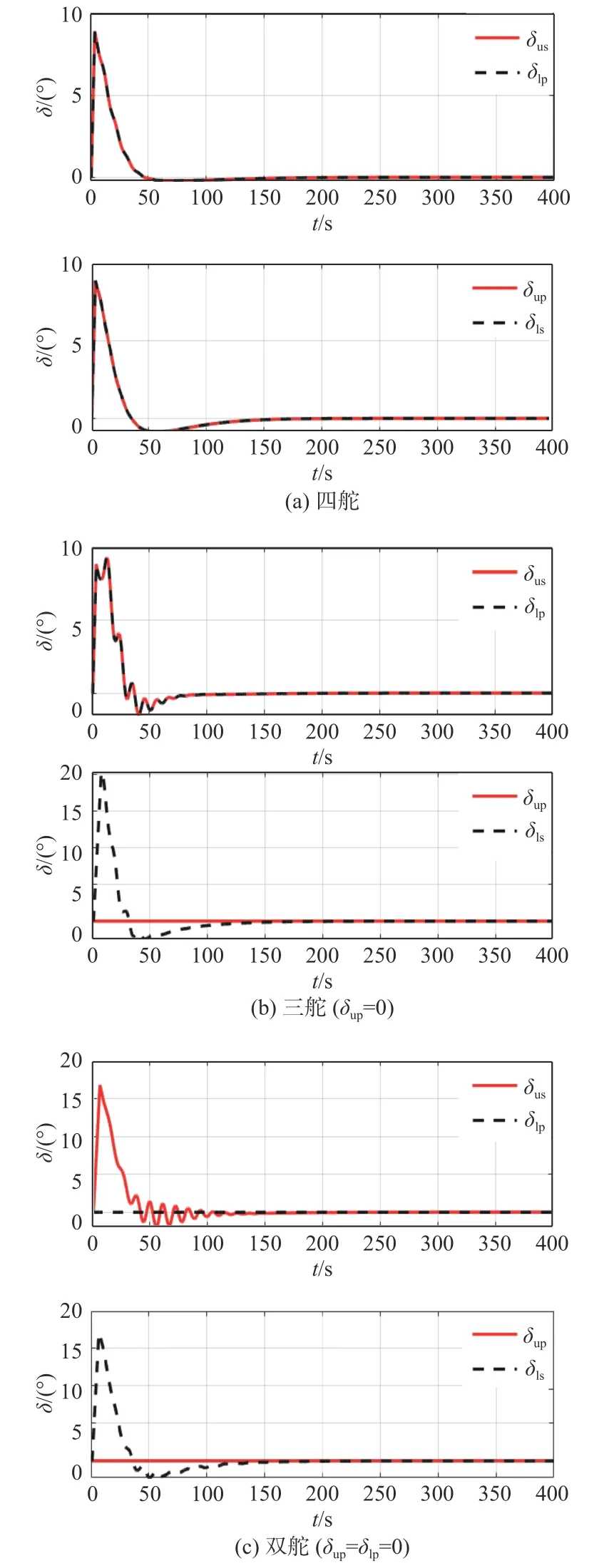
圖 4 定深旋回時(shí)的舵角分配Fig. 4 Rudder angle allocation on turning at certain depths
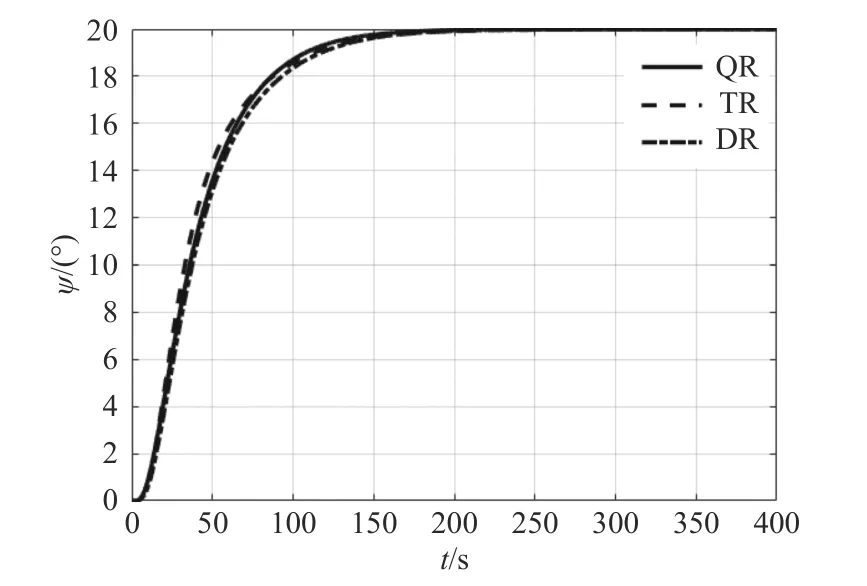
圖 5 定深旋回時(shí)的航向響應(yīng)Fig. 5 Heading response on turning at certain depths

圖 6 定深旋回時(shí)的橫傾響應(yīng)Fig. 6 Heeling angle response on turning at certain depths

表 1 3種可用舵面配置下定深旋回運(yùn)動(dòng)控制效果對(duì)比Table 1 Control effect comparison on turning at certain depths under three kinds of available rudder configuration


圖 7 潛浮時(shí)的舵角分配Fig. 7 Rudder angle allocation on diving

圖 8 潛浮時(shí)的深度響應(yīng)Fig. 8 Depth response on diving

圖 9 潛浮時(shí)的縱傾響應(yīng)Fig. 9 Pitch angle response on diving

圖 10 潛浮時(shí)的橫傾響應(yīng)Fig. 10 Roll response on diving
仿真結(jié)果表明:四舵及三舵條件下均采用對(duì)角聯(lián)動(dòng)操舵(圖7);四舵時(shí)無(wú)橫傾,三舵時(shí)橫傾變化平滑,這兩種配置下操舵平滑,雙舵時(shí)橫傾峰值最大,并存在橫傾振蕩和舵角抖動(dòng)的現(xiàn)象(圖7和圖10);3種可用舵面配置下的深度、縱傾控制性能差別較小(圖8和圖9),這是因?yàn)轸级鎸?duì)深度的控制起了主要作用,而單艉舵深度控制時(shí)的X舵控制律還需進(jìn)一步研究。
這里需要說(shuō)明的是,三舵、雙舵類(lèi)型具有不同的舵機(jī)配置,上述仿真曲線(xiàn)是在給定舵機(jī)配置條件下得到的,而不同舵機(jī)配置情況下的控制分配算法相同,但航向和深度控制性能會(huì)有所差異。
5 結(jié) 語(yǔ)
針對(duì)潛艇X舵操縱控制,本文采用了“主控制器—控制分配器”級(jí)聯(lián)控制結(jié)構(gòu),其中,主控制器使用的是現(xiàn)有的基于NDO的改進(jìn)滑模控制器,控制分配器設(shè)計(jì)則采用了加權(quán)最小二乘法的控制分配算法,此算法適用于各種舵機(jī)配置情況。仿真結(jié)果表明,在給定舵機(jī)配置下,隨著操舵面的減少,潛艇的潛浮性能并無(wú)差異,但轉(zhuǎn)向性能略有降低,橫傾振蕩及舵角抖動(dòng)趨于嚴(yán)重。實(shí)際上,X舵具有較好的橫傾控制能力,通過(guò)設(shè)計(jì)差動(dòng)舵角控制律即可實(shí)現(xiàn),從而提升在較少可用舵面以及潛艇強(qiáng)機(jī)動(dòng)等情況下的操縱性能,對(duì)于此問(wèn)題,后續(xù)將會(huì)進(jìn)一步展開(kāi)研究。
猜你喜歡
天水行政學(xué)院學(xué)報(bào)(2022年4期)2022-11-18 09:02:36
艦船科學(xué)技術(shù)(2022年13期)2022-08-11 09:30:02
鐵道通信信號(hào)(2020年9期)2020-02-06 09:15:22
漢語(yǔ)世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
數(shù)學(xué)大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學(xué)科學(xué)(學(xué)生版)(2019年5期)2019-05-21 01:00:18
中學(xué)生數(shù)理化·中考版(2018年10期)2018-12-07 00:44:52
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年30期)2018-11-22 06:20:24
中央社會(huì)主義學(xué)院學(xué)報(bào)(2017年1期)2017-04-16 05:34:07
中國(guó)衛(wèi)生(2014年12期)2014-11-12 13:12:40
