含柔順關節并聯機器人運動性能的研究
2020-05-21 03:29:20高慧芳
機械管理開發 2020年3期
關鍵詞:規劃
高慧芳, 田 浩
(1.中國電子信息產業發展研究院, 北京 100048; 2.北京飛利信科技股份有限公司, 北京 100191)
引言
通過結合并聯機器人和柔順關節的性能特點,構成的柔順關節并聯機器人,由于使用柔順關節作為運動副傳遞機器人系統運動,能夠避免由傳統運動副產生的運動誤差[1],從而改善機器人性能。
文獻[2-4]分別設計出具有宏觀尺度變形特征的片簧型柔順關節、扭簧型/缺口型柔順關節、開槽型柔順關節,具有扭轉角度大、軸心漂移小等優點。但研究內容對柔順關節的自身特性對系統整體性能的影響缺少考慮。
由于柔順關節存在軸心漂移誤差,為降低其影響,研究者采用構型設計方法,設計出車輪型[5]、圓環型[6]、輔助支撐型[7]、裂筒型[8]等構型的柔順關節,有效降低了軸心漂移誤差。但上述研究設計的柔順關節需要改變機器人系統的結構及傳動形式。本文將在不改變機器人原有結構的基礎上,研究使用柔順關節替代剛性關節對機器人性能產生的影響,所以不適用于本文研究。
由于柔順關節自身的低剛度特性,使得應用柔順關節構成的宏觀大范圍運動柔順關節并聯機器人的剛性較低,當系統進行宏觀大范圍運動時,極易引起柔順關節的彈性振動,對機器人運行精度造成嚴重影響。為此,需要通過合理的機器人運動規劃,保證系統的平穩運行。
本文以柔順關節并聯機器人為研究對象,針對軸心漂移誤差,設計漂移補償運動規劃方法和S 型速度曲線相結合的運動規劃方法。通過仿真試驗,驗證了該運動規劃方法的有效性。
1 柔順關節并聯機器人運動規劃
圖1 是平面三自由度柔順關節并聯機器人系統,以柔順關節自身的彈性變形傳遞系統運動,詳細運動學分析過程詳見文獻[10]。
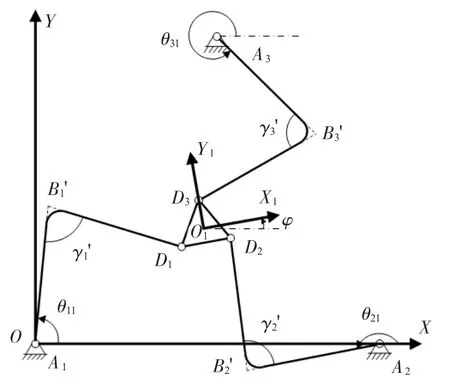
圖1 平面三自由度柔順關節并聯機器人機構示意圖
1.1 軸心漂移補償運動規劃
下頁圖2 中,如果已知動平臺位姿X,Di點的位置坐標可由幾何關系確定,根據定平臺的結構參數確定Ai點的位置坐標,從而可以得到ΔA1D1A2的各邊長度,由余弦定理計算內角α1,得到:

研究中考慮柔順關節并聯機器人主動桿和從動桿桿長的變化量一致[9],由于主動桿和從動桿的原始桿長相等,所以在ΔA1B1'D1中,主動桿1 和從動桿1實際桿長r11和r12相等。如果已知主動桿的關節角位移θ11,由正弦定理得到:
式中:φ1=θ11-α1,γ1'=π-2φ1。
同理,可得主動桿2 和從動桿2 的實際桿長r21和r22,主動桿3 和從動桿3 的實際桿長r31和r32。
當已知主動桿關節角位移及相應的動平臺位姿時,應用以上實際桿長計算方法,確定機器人系統各主、從動桿的實際桿長,然后調整主動桿的期望關節角位移,補償軸心漂移誤差。
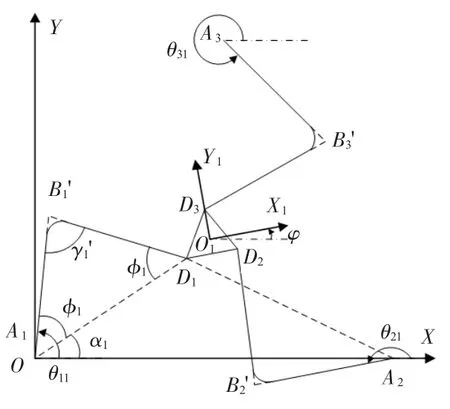
圖2 主動桿1 和從動桿1 的實際桿長計算
1.2 笛卡爾空間速度曲線規劃
本節將在笛卡爾空間,對柔順關節并聯機器人的末端期望軌跡進行規劃,保證運行精度。由于柔順關節的低剛度特性,當機器人系統運行速度較高時,如果速度或加速度發生突然變化,容易使柔順關節產生彈性振動,S 形速度曲線是能保證運動系統加速度連續的最低階次的速度規劃曲線,且速度曲線光滑連續,無加加速度脈沖。本節將基于S 型速度曲線,在笛卡爾空間規劃機器人的期望末端軌跡。
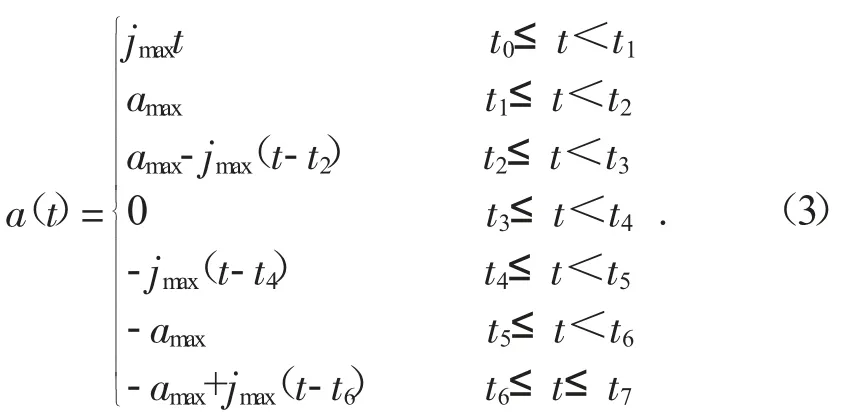
已知S 形速度曲線的最大加速度amax、最大速度vmax、最大加加速度jmax、起點速度vs及終點速度ve。設計S 形曲線的加減速過程對稱,即滿足a2=a6,j1=j3=j5=j7;為滿足快速性要求,規劃過程中要求系統盡量以最大速度及最大加速度運動,即a2=a6=amax,j1=j3=j5=j7=jmax。根據上述設計要求,得到S 形速度曲線的加速度方程為:
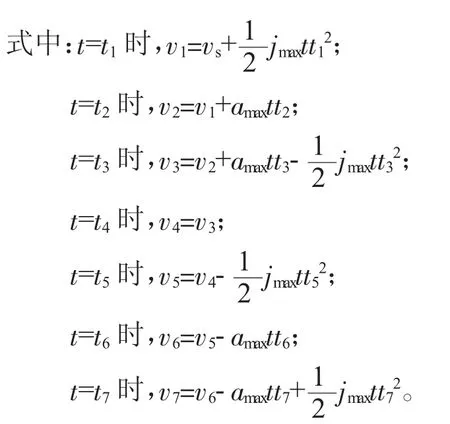
公式(3)對時間求積分,得到速度曲線方程,定義tti表示各段軌跡的時間增量,即tti=ti-ti-1。

公式(4)對時間求積分,得到位移曲線方程,公式(3)對時間求微分得到加加速度曲線方程,因篇幅限制不逐一給出。
2 仿真研究
使用由SolidWorks、ANSYS 及ADAMS 建立的柔順關節并聯機器人系統的虛擬仿真模型[10]進行仿真研究,驗證運動規劃方法的性能。
已知動平臺的期望軌跡是以Q1點為圓心,半徑為R的圓軌跡,以及從起點Q1點到圓軌跡起點以及圓軌跡終點返回起點Q1點的兩段直線,其中Q1=(450,260),R=100 mm。設定規劃參數為:vmax=83.33 mm/s,amax=200 mm/s2,jmax=700 mm/s3,vs=ve=0。
仿真試驗是使用軸心漂移補償運動規劃方法和S 形速度曲線規劃方法對機器人系統進行運動規劃,圖3 對比了使用本文提出的規劃方法和未使用該方法的機器人末端軌跡,結果可以看出,使用本文提出的規劃方法后機器人末端軌跡與期望軌跡的吻合度較高。
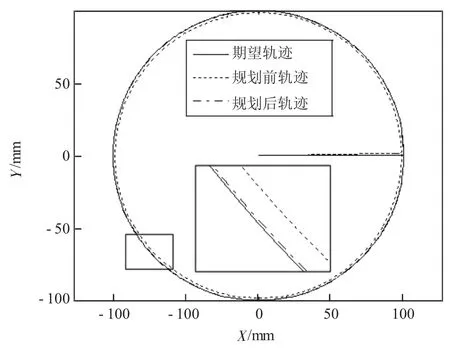
圖3 軸心漂移補償運動規劃方法的末端軌跡
下頁圖4 給出了使用本文提出的運動規劃方法前后,機器人沿兩坐標軸方向的末端軌跡誤差,可以看出規劃前機器人的末端軌跡有明顯誤差,沿兩坐標軸方向的誤差在[-3 mm,3 mm]的區間內,而規劃后末端軌跡誤差顯著降低,沿兩坐標軸方向的誤差縮小至[-1 mm,1 mm]的區間內,下降幅度明顯,機器人的運行精度顯著提高。
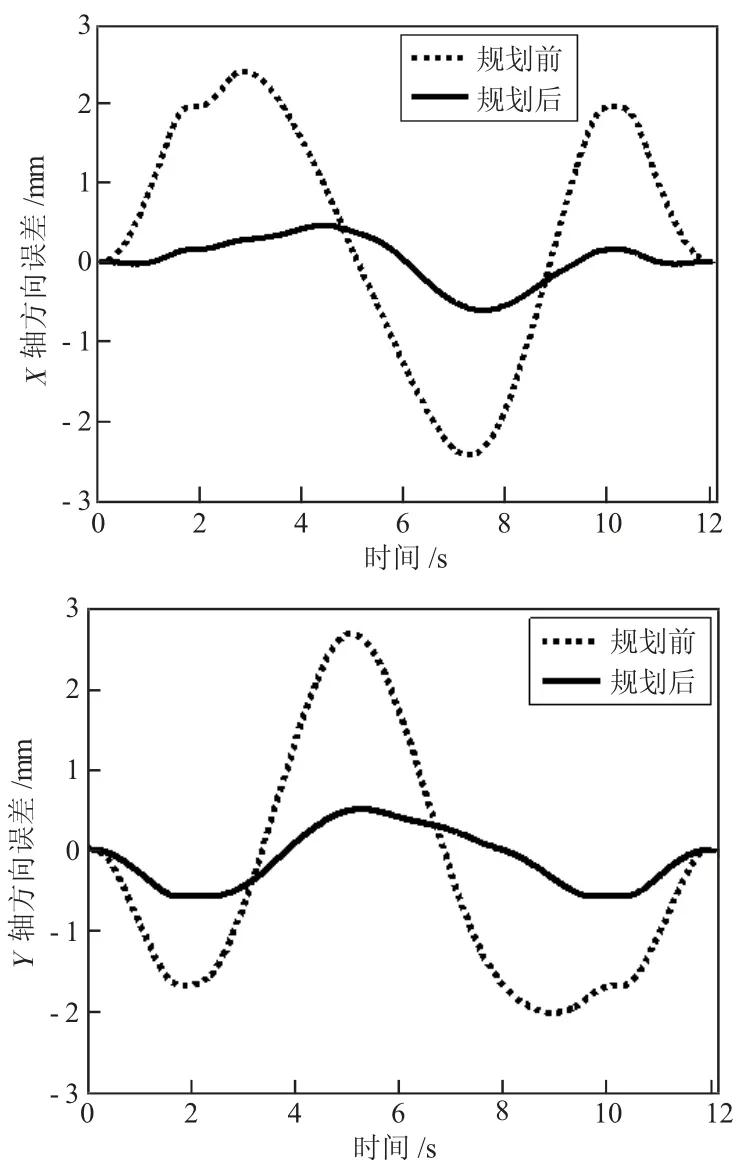
圖4 末端軌跡誤差
3 結論
以柔順關節并聯機器人為研究對象,使用軸心漂移補償規劃方法和S 形速度曲線規劃方法對機器人進行了運動規劃。仿真結果表明,提出的運動規劃方法,有效抑制了柔順關節的軸心漂移誤差,提高了柔順關節并聯機器人的整體運行精度。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
