LAMBDA 算法在GPS 載體姿態測量中的應用
2020-05-20 06:39:20牛慧軍楊開偉
數字通信世界 2020年4期
關鍵詞:測量
牛慧軍,楊開偉
(1.解放軍92941 部隊,葫蘆島 125000;2.中國電子科技集團公司第54 研究所,石家莊 050081;3.衛星導航系統與裝備技術國家重點實驗室,石家莊 050081)
1 GPS 姿態測量
GPS 姿態測量在GPS 應用中得到了快速的發展,在國民經濟各個領域得到廣泛的應用,同時也是航海、航天及陸基導航系統中的關鍵技術之一。GPS 載波相位動態差分定位技術的發展,尤其在工程測量中更是顯示出其優越性。載波相位差分定位是目前精度最高的衛星導航定位方式,在幾米長的基線內可獲得毫米級精度,載波相位差分定位技術的突出特點為船舶姿態角的測量開辟了新的途徑,并提供了有力的技術支持。獲得高精度的姿態角關鍵是要得到高精度的相對位置,GPS 測姿的核心技術是載波相位的高精度測量和整周模糊度的快速正確解算。整周模糊度的求解方法有多種,其中優缺點各不相同,利用LAMBDA 算法來求解整周模糊度將有效提高正確性和可靠性。
2 GPS 姿態測量的方法與實驗
2.1 GPS 測姿原理
GPS 載體測量測量主要是通過各個GPS 天線和接收機進行信號接收觀測,利用各接收機生成的GPS 偽距和載波相位觀測數據來確定載波相位模糊度,進而通過相對差分定位來得到各個天線之間的相對位置。在相對位置的基礎上,通過矩陣旋轉和坐標轉換關系計算出載體的姿態角。
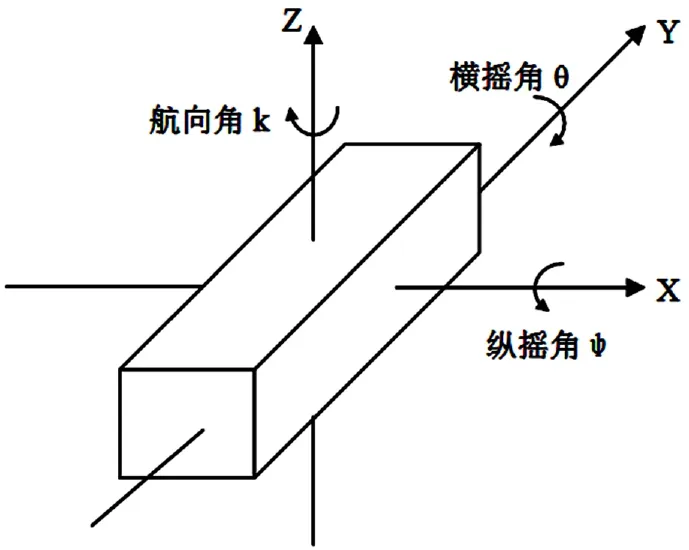
圖1 船舶姿態角定義
載體姿態角由航向角k、橫搖角θ、縱搖角ψ 來定義,如圖1所示。姿態角(k,θ,ψ)的測量采用載體坐標系,其中,Y 軸與首尾線一致,指向航行方向,載體坐標系為相對于當地水平面的地平坐標,即YX 平面位于載體所在點的水平面。


載體航向角k 是地理北順時針旋轉至Y 軸的夾角,若已知Y軸上任意兩點的大地坐標則可算出k 角。
四元素又稱歐拉對稱參數,是載體姿態表示的另一種方法。如果空間中存在兩個原點重合的直角坐標系,那么總存在一條不變軸和一個α 角度,其中一個直角坐標系繞不變軸旋轉α 度后,能與另一個直角坐標系完全重合。這種姿態表示法可用四個參數來定義:
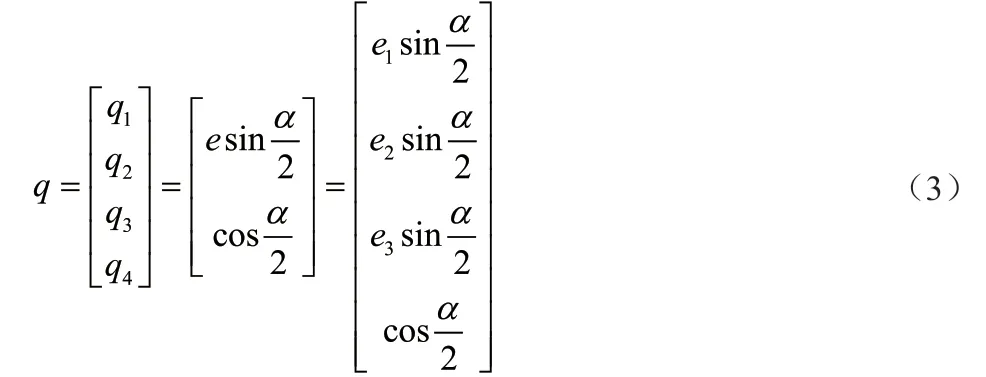
式中,e1,e2,e3是旋轉軸的方向矢量。

同時改變四個參數的符號,不影響載體姿態的計算結果。由于四元素法不能很好的反應載體姿態的物理特性,沒能得到廣泛的應用,而歐拉角法可以清楚的表達載體姿態的物理特性,所以在GPS 姿態測量中得到普遍應用。
2.2 測姿方案
為了得到計算載體姿態角所需的坐標分量,在載體上沿首尾線縱軸和垂直于縱軸的一側或雙側安裝接收天線,形成3天線或4天線姿態測量系統。多天線共用一個接收機,由于所有衛星信號的瞬時相位與同一本機參考信號的相位比較,所得到的觀測量已不存在接收機鐘差。天線間的距離事先精確測定,作為快速求解載波相位模糊度的約束條件,可加速模糊度求解過程。如果條件所限,天線的位置不必縱向橫向正交安置,各天線也不必共用一接收機。經載波相位差分定位可得到各天線間的相對位置,在差分定位中以任一天線的當前位置作為已知點。GPS 定位結果采用WGS-84坐標系,為了得到載體坐標系下的相對位置需進行坐標變換。進行坐標變換時,通常選取首尾線船尾一側的天線位置為坐標原點,其緯度為φ0,經度為λ0,高程為h0。由首尾線上兩天線的大地坐標求得航向為k,設艦船上其他任一天線在WGS-84直角坐標系下的坐標為(xG,xG,zG),在載體坐標系下的坐標為(x,x,z),坐標轉換關系為:
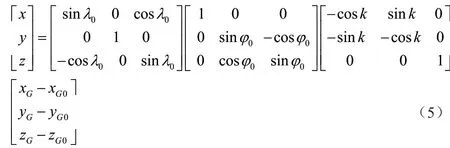
yG0=(n0+h0)cosφ0sinλ0;zG0=[n0(1-e2)+h0]|sinφ0;n0=a(1-e2sin2φ0)1/2;
由各天線在載體坐標系下的坐標分量可求得兩天線間的相對位置,進而求得姿態角。
用載波相位差分法求解姿態時,一個重要的問題是解算整周模糊度,準確獲得載波相位的整周模糊度是GPS 姿態測量的關鍵,目前常用的整周模糊度解算方法是LAMBDA 算法。
3 LAMBDA 算法求解整周模糊度
采用最小二乘模糊度去相關調整算法(簡稱LAMBDA)具有完善的理論體系和較好的性能,在模糊度解算中是一種較為理想的方法。其載波相位觀測方程的數學模型為:
y=Aa+Bb+e
式中,y 為雙差載波相位觀測量;a 為未知整周模糊度向量;b 為未知位置參數向量;A 為模糊度系數矩陣;B 為方向矩陣;e為雙差模式下的觀測誤差向量。求解過程包括模糊度去相關處理和模糊度整數搜索。
3.1 模糊度去相關處理
整數高斯去相關法可以顯著減小模糊度間的相關性,該方法要求變換過程中元素保持整數特性。首先進行高斯變換:

變換后得到:
要使變換后的模糊度不相關,應該滿足:

即

模糊度變換矩陣Z 具體構造方法如下:
(1)通過進行二維模糊度變換,得到變換矩陣。
(2)進行變換后的方差-協方差陣計算:

(3)根據門限判斷是否結束變換,若不滿足門限,則重復步驟(1)、(2);若滿足門限,得到Z2,…,ZK。
(4)確定變換矩陣:Z=ZK…Z2Z1。
3.2 模糊度整數搜索
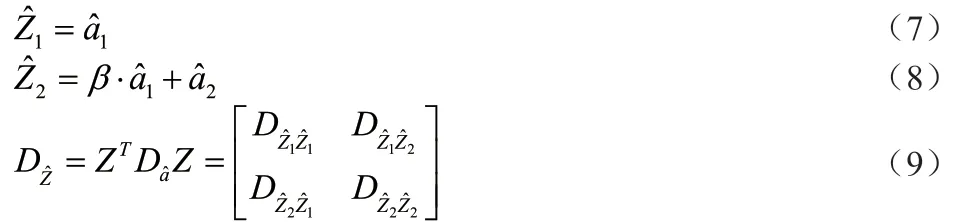
得到模糊度去相關變換矩陣后,用該矩陣構造新的相關程度較低的模糊度集合。新的模糊度向量用Z 表示,其最小二乘估計和方差-協方差矩陣通過下式來得到:

雙差模糊度搜索空間可變為:

轉化后的模糊度搜索空間的展開形式為:

從最后一個模糊度開始搜索計算,有初始關系式:

利用計算得到的αn整數值來計算αn-1,依此類推,直到α1。
4 仿真
仿真測試實驗分為3米基線和1米基線兩組,對本文測姿方法進行測試分析。設定基線為3米,仿真次數為400次時,得到姿態誤差曲線如圖2所示:
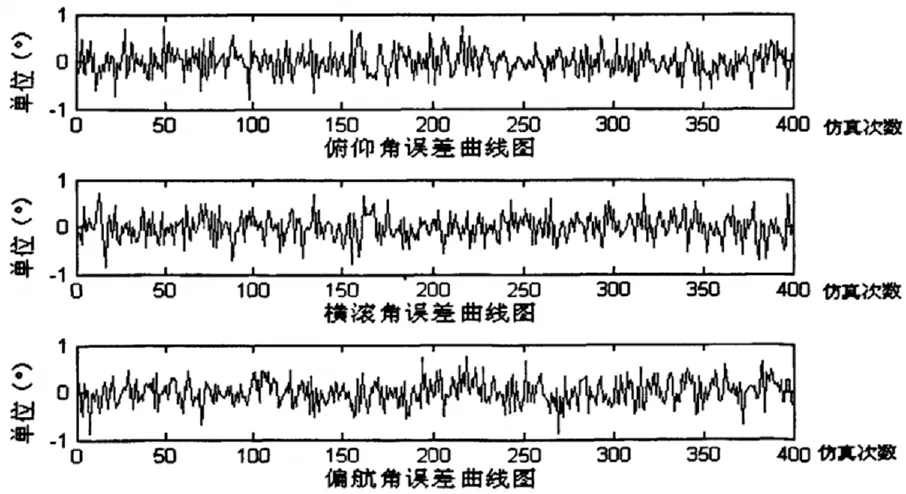
圖2 基線3米姿態角誤差曲線圖
設定基線為1米,仿真次數為400次時,得到姿態誤差曲線如圖3所示:
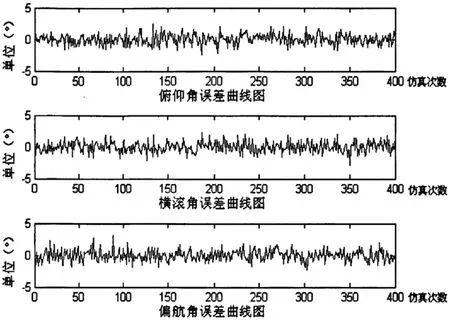
圖3 基線1米姿態角誤差曲線圖
姿態角誤差統計如表1所示:
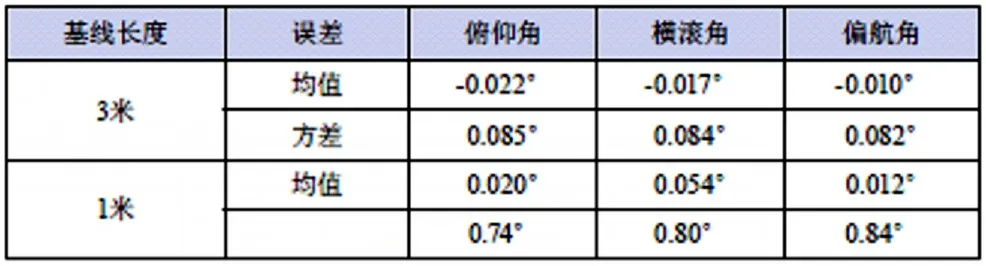
表1 姿態角誤差統計表
通過仿真實驗及結果分析可知,LAMBDA 算法在GPS 載體姿態測量中應用是可行的,3米基線長度各姿態角測量精度均優于0.085°;1米基線長度各姿態角測量精度均優于0.85°。
5 結束語
采用載波相位測量與差分技術進行GPS 測姿已是當前應用的主要方法,本文利用載波相位差分定位方法,并通過LAMBDA算法求解載波相位整周模糊度來實現高精度姿態測量。通過仿真實驗和數據分析證明,該方法可行,并且測姿精度能夠滿足使用需求,具有實際工程意義。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
