基于軌跡數據的多工況典型駕駛行為能耗評估
2020-05-16 06:33:16吳麗寧景首才
計算機應用與軟件 2020年5期
關鍵詞:模型
惠 飛 吳麗寧 景首才 魏 誠 李 敬
(長安大學信息工程學院 陜西 西安 710064)
0 引 言
近年來,汽車產業成為國民經濟的重要支柱,因此交通也已成為我國乃至全世界能源消耗量最高的行業,其中道路交通最為嚴重。2013年葡萄牙運輸部門使用的石油資源占全國一年總量的40%,其中道路交通占81%[1];2014年我國清潔能源、可再生能源以及電力在車用燃料替代中超過了500萬噸[2];2015年北京市交通運輸業能源消耗占全市能源消耗的18.23%[3];2016年在乘用車保有量繼續增長、新型城鎮化不斷推進的背景下,我國石油需求同比增長4.3%左右[4];2017年我國消耗的能源高達110.8億噸,并且2018年的消耗量比上年增長4.6%[5]。從當前情況觀察到,道路交通方面使用石油比例逐年增長,若再不對機動車的能耗進行研究和治理,能源短缺問題將會越來越嚴重。
國內外學者基于機動車行駛參數在能源消耗碳排放方面做了大量研究:文獻[6]在分析安全輔助系統對能耗的影響時,排除了速度變化的影響,將加速度波動作為能耗增加的主要原因進行研究。文獻[7]分析了在交通限制下速度和加速度兩個參數對能耗的影響。文獻[8]通過燃油密度、發動機轉矩、轉速計算油電混動汽車的單位耗油率。文獻[9]通過t-檢驗證明了減少能耗及碳排放的措施不會影響汽車行駛速度,并且分析出空調溫度、輪胎、燃油密度、車輛阻力、車重等可能影響能耗的因素。文獻[10]收集了一些在行駛過程中利于減少能耗的因素,分析出提供中等頻率的評估信息可以使用戶長期處于低能耗階段。文獻[11]發現合理的駕駛風格可以節省5%~20%的能耗。文獻[12]在高速、主干道、二級公路上比較能耗的變化情況,并建立了以速度作為唯一參數的能耗模型。文獻[13]通過對所有道路環境中的交通流量進行控制和管理,發現駕駛員能源消耗明顯降低。文獻[14]通過跟弛模型對速度進行優化,發現該模型能有效降低車輛能耗。文獻[15]在交叉口停車線以及上游下游處,通過改變駕駛行為,研究排放的變化情況,并基于每個路段構建不同的排放模型。
綜上,由于行駛參數與能耗之間存在直接關聯且易于獲得,因此國內外學者在研究減少能耗的生態駕駛行為時多以行駛參數為出發點。但是駕駛員因素也是能耗和排放增加的最主要成因,若要從駕駛員角度出發,則能達到緩解交通擁堵、減少能源消耗和污染物排放的目的,對交通行業的發展具有重要意義。基于此,本文分析了在多工況下,急加速、急減速、正常加速、正常減速、勻速這五種典型駕駛行為的能源消耗情況,并且提出一個基于多工況的駕駛行為能耗評估模型,期望可為政府部門制定節能減排政策以及交通部門實施交通管控方面提供參考。
1 多工況駕駛行為能耗評估模型
本文提出一個多工況駕駛行為能耗評估模型,如圖1所示。該模型實現過程包括:數據預處理、多工況駕駛行為識別、能耗分析與模型驗證三個部分。第一部分:進行數據采集和預處理;第二部分:利用K-means對駕駛工況進行分類,形成低速、中速、高速三類,然后參考行駛參數對駕駛行為進行特征提取,最后進行兩級聚類算法,即首先對特征參數進行譜聚類,然后對一級聚類結果使用AGNES算法進行二次聚類,得到急加速、急減速、正常加速、正常減速、勻速五類;第三部分:量化分析不同駕駛行為的能耗,并且通過將實際能耗與模型計算的能耗進行對比來驗證模型精度。

圖1 多工況典型駕駛行為能耗評估框架
2 數據采集與預處理
2.1 實驗數據采集
為獲取可復現的實驗數據,本研究邀請不同駕駛員在相同天氣狀況下以市內相同路段為基礎,把駕駛行為作為唯一變量進行實驗。
實驗在西安市如圖2所示的線路上(粗線是軌跡,起點為長安大學本部,終點為西安城西客運站),由5名駕駛員進行數據采集,GPS設備按照20Hz采集信息。部分原始數據如表1所示。

圖2 實車實驗路線圖
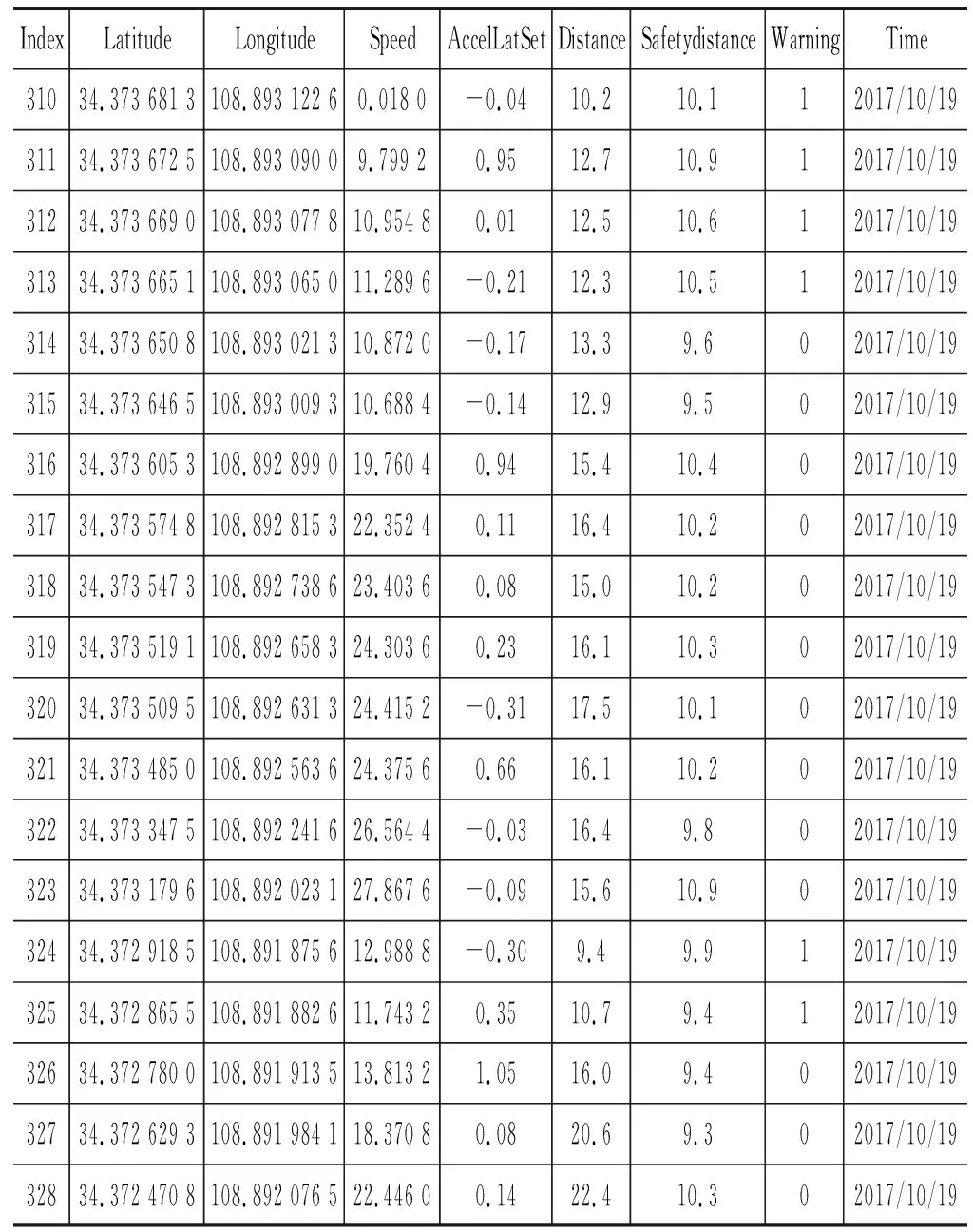
表1 部分原始數據
2.2 VT-Micro能耗模型
目前VT-Micro微觀能耗模型是被大家公認的一種車輛瞬時能耗計算模型[16-17],本文選取VT-Micro來計算補充瞬時能耗數據。模型計算如下:
(1)
式中:MOEe為瞬時能耗;Li,j為a≥0的回歸系數;Mi,j為a<0的回歸系數;s為瞬時速度;a為瞬時加速度。基于瞬時能耗可計算出在駕駛行為i狀態時的平均能耗,計算如下:
(2)

(3)
式中:FC指工況內的百公里油耗;v指均速度;D指燃油密度,93#汽油密度為725 g/l。
2.3 數據預處理
GPS設備可以采集經緯度、速度等信息,但是由于采集過程可能會受測試儀器、環境、駕駛員等影響,因此必須通過預處理移除不可信的數據,從而保證后續實驗數據的有效性。另外本文假設在30分鐘內車輛位置的變化范圍不超過50 m被認為是停車。
本文預處理包括數據清洗、地圖匹配、軌跡分段。數據清洗方面具體操作如下:
1) 刪除超出實驗路段經緯度范圍的采樣點;
2) 由于本文選取VT-Micro補充能耗,所以必須首先依據VT-Micro的參數標準,剔除無效數據;
3) 剔除具有相同時間戳的冗余采樣點;
4) 本文駕駛行為不包含停車,因此要剔除無堵塞停車采樣點;
5) 將原始數據切分成多個微觀行程,每段時長不超過3分鐘。
進行地圖匹配時需要將GPS數據與標準經緯度信息匹配,剔除無效樣本點。本文將選取一種針對大規模GPS數據的地圖匹配算法[18]。
本文把軌跡段作為識別駕駛行為的基本單元,由于行駛過程中會產生有效與無效軌跡段,因此引入凈曲率和平均距離指標來對此進行劃分。用于計算凈曲率和平均距離的因子如圖3所示。
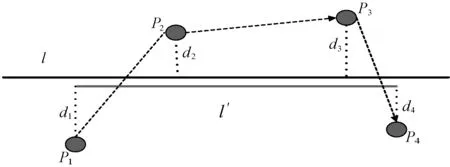
圖3 計算軌跡凈曲率和平均距離的指標
凈曲率:表示實際軌跡與路網的匹配度,l/l′值為1表示完全匹配,反之表明差異性高。l表示軌跡原始長度,l′表示匹配到路網上的長度。
實驗基于以上兩個指標,利用隨機森林分類器進行訓練,然后根據訓練后的模型對剩余軌跡段進行劃分,最后基于有效軌跡段識別駕駛行為。
3 多工況典型駕駛行為聚類識別
3.1 不同駕駛工況的聚類研究
聚類在類標簽未知時自動進行劃分,是一種無監督學習算法,它盡可能將相似數據劃分到同一個類,反之劃分到不同的類。目前在交通類的研究項目中也廣泛運用到聚類算法[19-21]。
3.1.1 基于Eros距離的相似度度量方式
目前最常用的度量方式是歐氏距離和動態時間彎曲距離[22]。利用歐式距離處理時間序列的相似度時,計算結果與實際距離有較大差異,因此本文不采用歐氏距離度量。動態時間彎曲距離曾經主要運用于語音識別[23],目的是尋找任意兩個向量之間的最短距離,但在處理時間序列時,時間軸的微小變化也會對結果產生較大影響,因此本文也不選用動態時間彎曲距離進行度量。
本文選擇借鑒多維時序相似性的度量思想,利用基于Eros(Extended Frobenius Norm)距離的度量方式對本文采樣點進行相似性度量。Eros距離是基于矩陣加權F范數進行擴展的,矩陣Am×n的加權F范數如下[24]:
(4)
式中:w表示權重向量矩陣,跡為1。特征向量A-VA=[a1,a2,…,an]和B-VB=[b1,b2,…,bn]的Eros距離如下:
(5)
3.1.2 Eros距離中權值的計算方法
常見的權值計算方法有:和法、根法、特征根法、對數最小二乘法、最小二乘法[25]。本文在Eros距離中的權值計算過程如算法1所示。
算法1 計算權值向量
輸入:特征值矩陣Sn×N
輸出:加權向量
1) 將矩陣按列進行單位化
2) 計算矩陣每一行的和{sum1,sum2,…,sumn}
3) 計算整個矩陣的和Sum
4) 計算加權向量=sumi/Sum
3.1.3 基于K-means的工況聚類
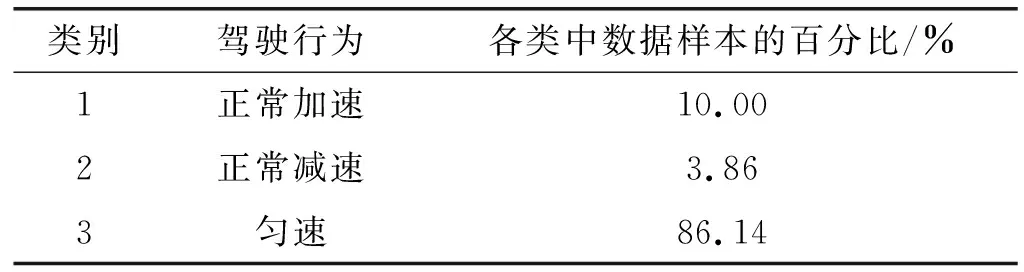
本文針對采樣點,利用基于Eros距離度量的K-means算法對駕駛工況進行聚類。實驗部分研究低、中、高速三種駕駛工況,聚類中心見表2,各個工況的時間百分比見表3,聚類結果見圖4,其中X軸為瞬時速度,Y軸為瞬時能耗。
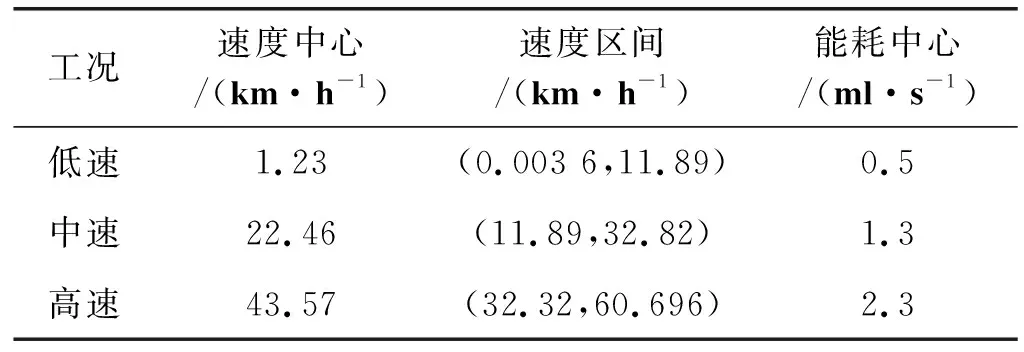
表2 駕駛工況劃分結果
表3 駕駛工況時間百分比
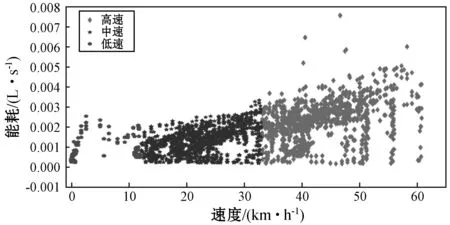
圖4 駕駛工況聚類
3.2 不同駕駛行為的聚類研究
3.2.1 五種典型駕駛行為定義
本文基于行駛速度、加速度、持續時間與能耗之間的關系,提出五種與能耗相關的駕駛事件,分別是勻速、正常加速、正常減速、急加速、急減速,它們加速度的變化如圖5所示。由于本文將軌跡段作為識別事件的基本單元,因此要求所有有效軌跡段的持續時長Δt≥2 s。

圖5 加速度隨時間變化圖
3.2.2 駕駛行為特征提取
為了保證聚類效果的高效性,首先需要對以上五種典型駕駛行為進行特征提取。本文用于特征提取的參數見表4。
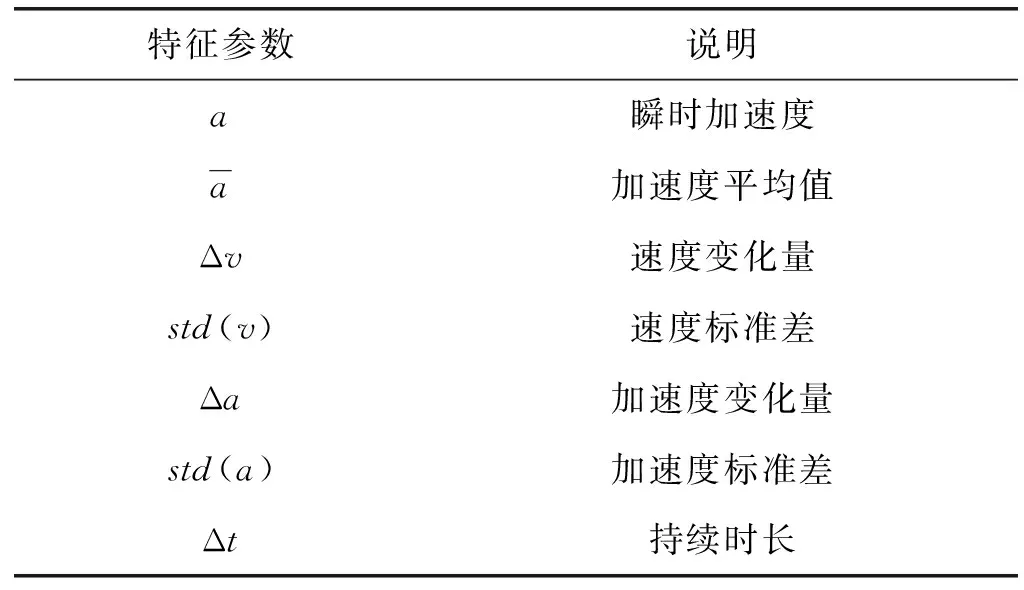
表4 用于特征提取的行駛參數
1) 勻速行為。勻速事件指在一段時間內加速度變化幅度較小的過程,它的變化如圖5(a)所示。該事件的識別條件[26]如下:
-0.27 m/s2≤a≤0.27 m/s2
(6)
std(a)≤0.41 m/s2
(7)
2) 正常加速行為。正常加速指速度隨時間緩慢增加的過程,它的變化如圖5(b)所示。由于加速行駛時能耗量與持續時長呈正相關,因此在識別時除了考慮加速度還要考慮持續時間。該事件的識別條件[26]如下:
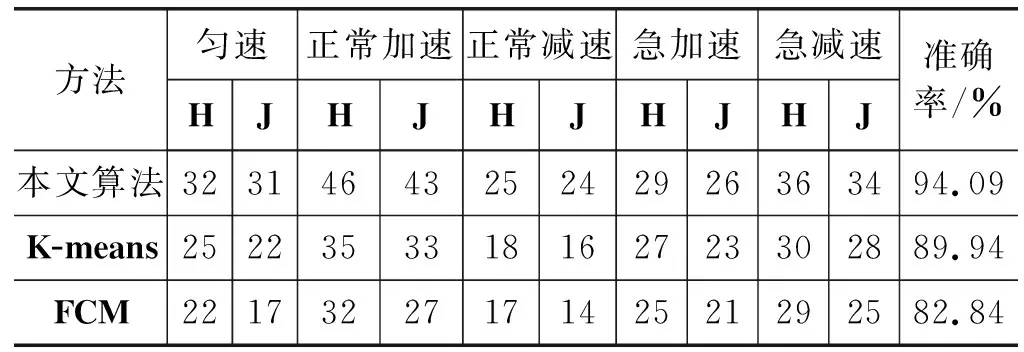
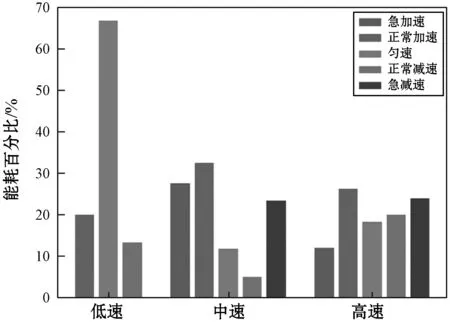
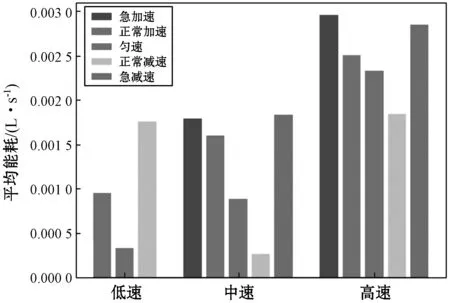
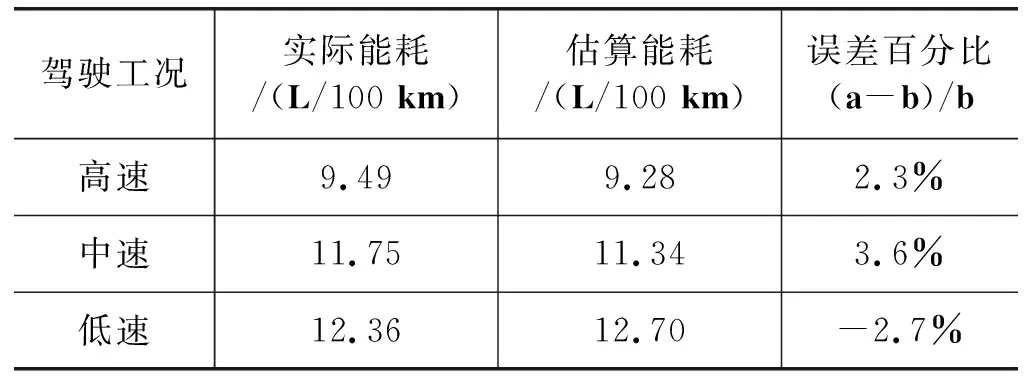
0.27 m/s2 (8) Δt≥2 s (9) 3) 正常減速行為。正常減速指速度隨時間變化緩慢降低的過程,它的變化如圖5(c)所示。該事件的識別條件[26]如下: -1.38 m/s2≤a<-0.27 m/s2 (10) 4) 急加速行為。急加速事件指駕駛員操作使行駛速度瞬間得到提升的過程,它的變化如圖5(d)所示。該事件的識別條件[26]如下: a>1.11 m/s2 (11) 5) 急減速行為。急減速事件指駕駛員操作使行駛速度瞬間降低的過程,它的變化如圖5(e)所示。該事件的識別條件[26]如下: a<-1.38 m/s2 (12) 3.2.3 基于AGNES譜聚類的行為識別及準確度分析 本節基于AGNES譜聚類算法對提出的5種駕駛事件進行識別,由于原始實驗樣本具備屬性廣、數據量大、存在無效數據等特點,因此采用該方法對樣本進行聚類分析。首先在對以上事件進行特征提取的基礎上進行譜聚類,然后使用AGNES進行二次聚類,最后得到五個駕駛行為類。 在對每種駕駛工況進行行為識別時,首先利用譜聚類得到樣本特征值和特征向量,然后用AGNES算法對上級結果進行聚類分析,其中AGNES算法可以減少人為因素的影響、提高聚類的準確率。實驗整體流程如算2所示。 算法2 基于Eros距離的聚類算法實現 輸入:高速、中速、低速工況中的有效軌跡段 輸出:不同的駕駛行為類 1) 利用閔可夫斯基距離構建基于樣本集的鄰接矩陣; 2) 利用KNN算法獲取相似矩陣W; 3) 基于W生成度矩陣D; 4) 利用W和D構建拉普拉斯矩陣L=W-D; 5) 對L的特征向量實現凝聚層次聚類算法; 6) 利用Eros距離計算特征向量的初始距離矩陣; 7) Loop 8) 獲取距離矩陣中值最小的兩個類; 9) 合并8)中的類,并覆蓋以上索引值較小的類; 10)計算新類和其余類的距離,重新生成距離矩陣; 11) 重復8)-10)步,直到滿足各工況下的類個數退出循環。 本文實驗部分在低速時,由于車輛處于起步階段因此沒發生急加速、急減速,而在中速和高速時,為及時應對交通狀況,以上五種行為都會發生。 本文方法與K-means算法、FCM算法的準確度對比結果如下:由本文方法在高速工況下識別到的各類行為樣本量見表5,算法準確度比較見表6;中速工況下樣本量見表7,準確度比較見表8;低速工況樣本量見表9,準確度比較見表10。其中H指檢測為某類駕駛行為的數據,J指正確檢測為該類駕駛行為的數據。由表可知本文提出的基于Eros度量的兩級聚類算法相對于K-means算法和FCM算法具有較高的準確度。 表6 高速工況下算法準確度比較 表7 本文方法在中速工況下識別的各類行為樣本量 表8 中速工況下算法準確度對比 表9 本文方法在低速工況下識別的各類行為樣本量 表10 低速工況下算法準確度對比 實驗部分針對個人出行軌跡數據進行分析,實現不同工況的聚類,其中高速工況的能耗占全部能耗的56.6%,中速工況能耗占38.6%,低速工況能耗僅占總能耗的4.8%。多工況下典型駕駛行為的累計能耗對比如圖6所示,平均能耗分析如圖7所示,評估模型準確度分析見表11。 圖6 累計能耗對比圖 圖7 多工況下駕駛行為的平均能耗 表11 本文評估模型準確度分析 從圖7觀察到:高速工況的駕駛行為平均能耗高于中速、低速時任何行為的平均能耗。在高速工況下進行分析得到:急加速行為的平均能耗最高,比正常加速時高31%;急減速行為的平均能耗次之,比正常減速行為的平均能耗高35.4%;而中速工況時急加速行為的平均能耗比正常加速高11%,急減速行為的平均能耗比正常減速高85.9%。 本文主要工作是提出一個基于多工況典型駕駛行為的能耗評估模型,針對出行軌跡數據識別出高速、中速、低速三種駕駛工況以及急加速、急減速、加速、減速、勻速五種與能耗相關駕駛行為,并在每種情況下,分析機動車的能耗變化情況。實驗在三種不同駕駛工況下,將該模型與K-means和FCM算法對同一數據集的行為識別精度進行比較,發現本文算法的識別度高達92%以上,優于其他兩種算法。從機動車的能耗變化情況中發現:高速工況時急加速行為的平均能耗比正常加速高31%,急減速行為比正常減速高35.4%;中速工況時急加速行為的平均能耗比正常加速高11%,急減速行為比正常減速高85.9%。將實際能耗與模型能耗對比發現,該模型的能耗評估誤差在±4%內。由此可見,該模型可以為交通部門的道路能耗評估提供有效方法,并且為交通部門實施交通管控提供參考。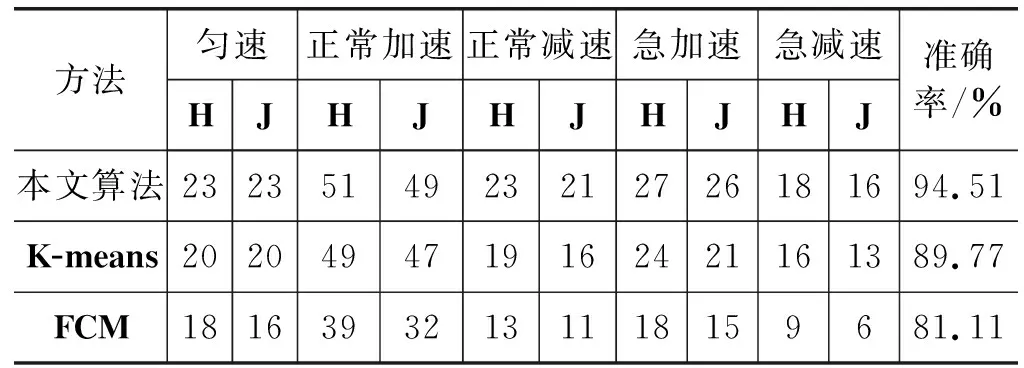


4 多工況下典型駕駛行為的能耗分析
5 結 語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19