雙小車岸邊集裝箱起重機主吊具防搖防扭控制特性研究
2020-05-14 06:12:34段小明
港口裝卸 2020年2期
段小明 單 磊
上海振華重工(集團)股份有限公司
1 引言
自動化碼頭雙小車岸邊集裝箱起重機(以下簡稱岸橋)主要包括主小車(前小車)和門架小車(后小車)。在自動化岸橋主小車防搖控制方面比較常見的方式為電子防搖,主要包括輸入整形、分段加減速、線性二次型LQR、模糊控制以及滑模控制[1]。主小車吊具防扭控制方面主要包含機械分離小車方式[2]、變頻防扭電機控制方式、后大梁油缸基于Bang-Bang控制理論等電子防扭方式。但是能夠應用于實際的產品基本是國外的,存在價格昂貴且源代碼不可見等問題,因此設計開發一套有效的自動防搖定位以及防扭控制方法很有必要。本文介紹了主小車吊重負載動力學模型,主小車防搖定位控制及主吊具防扭控制方法。實踐證明在大多數情況下,該方法能夠有效減少吊具搖晃及旋轉運動,縮短自動對箱操作時間,提高自動化作業效率。
2 主小車防搖控制
2.1 主小車動力學模型
考慮到主小車是一個強耦合的非線性時變系統,為簡化分析,將主小車吊重負載看成一個懸擺點可移動的單擺模型(見圖1)。
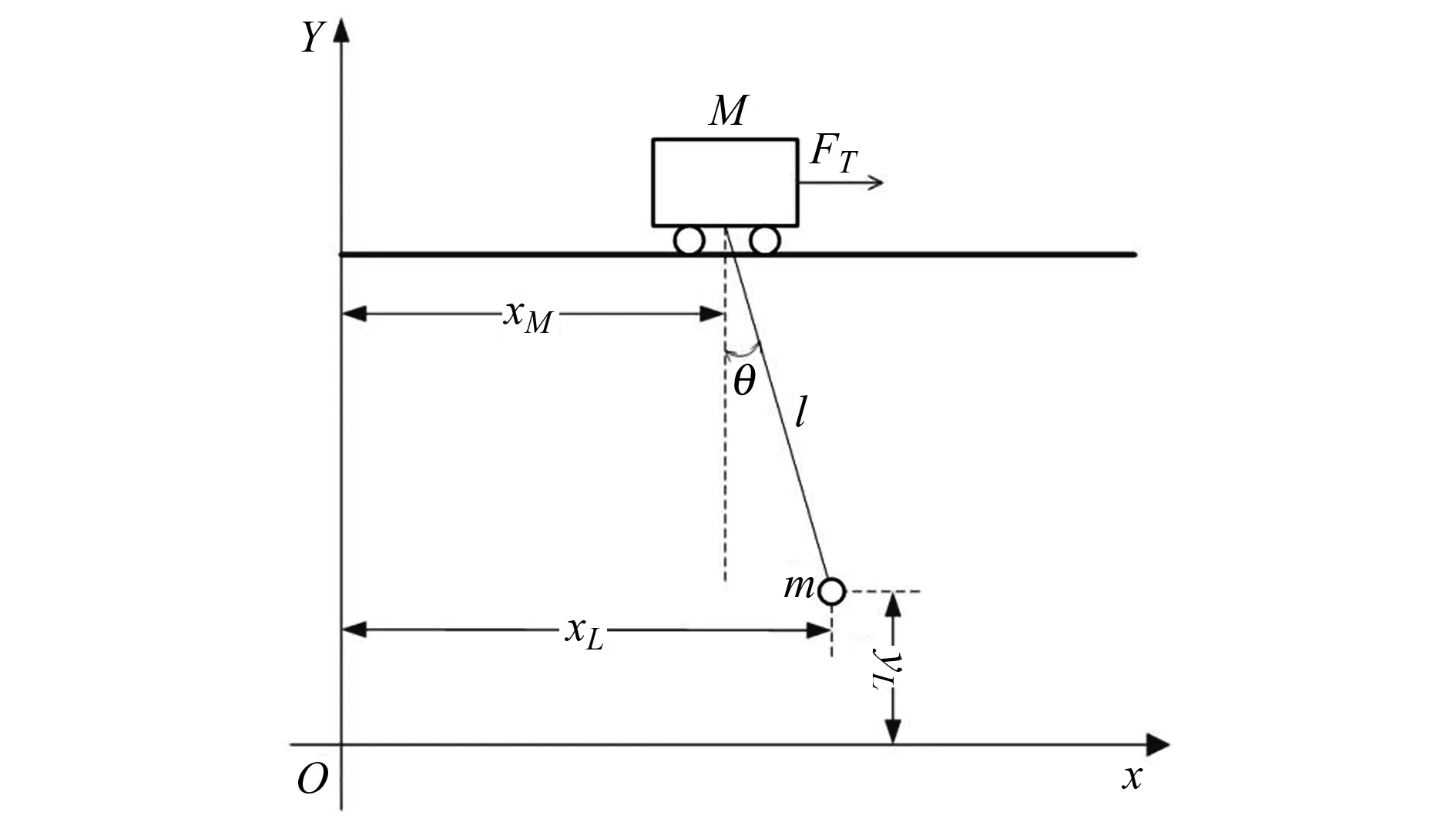
圖1 小車-吊重負載模型
其中M和m分別為主小車和吊重的質量(不帶載時為吊具質量),l為起升鋼絲繩的長度,xM表示主小車在水平方向上的位移,xL表示吊重在水平方向上的位移,yL表示吊重在起升方向上的位移,θ表示吊重偏離豎直方向的擺角。
(1)
選取吊重在最低點時為零勢能位置,系統勢能為:
V=mgl(1-cosθ)
(2)
根據Lagrange第二類方程,并選取主小車位移,繩長及擺角為廣義坐標,得到系統的非線性動力學模型為:
(3)
(4)
(5)
式中,FT為主小車方向驅動力;FH為主小車起升方向驅動力;g為重力加速度。
考慮到主小車防搖定位時的控制量為小車方向速度指令信號,則
(6)
式中,Vref為小車速度指令信號;Kp為增益系數,此處忽略負載轉動慣量的折算質量這部分產生的力。


(7)
2.2 主小車路徑規劃及運動控制
在集裝箱運輸過程中,為了讓吊具搖晃角度盡可能小,設計的軌跡應盡可能平滑,同時設計的軌跡應滿足一定邊界約束條件,即滿足起始、結束段位置條件,速度條件及其有限階次導數存在。選擇的負載軌跡(xd,yd)為九次多項式軌跡,多項式系數由牛頓插值法確定,具體的運行軌跡見式(8)和式(9)。
xd(t)=xs+(xe-xs)·
(8)
yd(t)=ys+(ye-ys)·
(9)
式中,(xs,ys)為吊具起始位置;(xe,ye)為吊具終端位置;T為小車到達目標點的時間。

為了增強系統抗干擾能力以及補償建模誤差,此處采用帶積分環節的LQR控制方式。另外,為了直接利用吊重相對位置檢測傳感器輸出數據(吊重相對位置xd為吊重偏離垂直方向的位移,向前擺動為正,向后擺動為負),將狀態變量中角度輸出部分替換為吊重相對位置值,且近似認為xd=lθ,控制輸出表達式為:
(12)
式中,exd為吊重相對位置偏差;控制增益k1、k2、k3、k4、k5由Riccati方程決定。
2.3 防搖定位效果驗證
為了驗證所設計控制器有效性,在實際岸橋設備上進行了測試。主吊重位置由自主研發的吊具位置檢測系統獲得,通過RS422與主控單元進行通訊,主控單元與設備控制器通過Profibus-DP進行通訊,實現運動控制指令下發與設備運行狀態反饋。測試工況為主小車空吊具從海側前大梁運行至平臺上方并自動著箱,風速7 m/s左右。主小車重量100 kg,主吊具重量15 kg,Kp=1×105,控制周期10 ms,采樣周期100 ms。實驗結果見圖2。
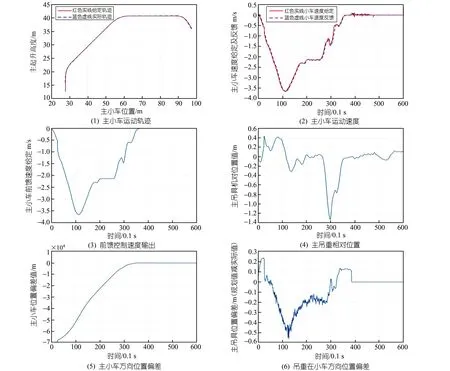
圖2 防搖實驗結果
從圖2中可以看出,所設計的控制器能夠很好的跟蹤設計軌跡,小車達到目標后,小車位置偏差很小,吊具幾乎無明顯搖晃情況,LQR能很好補償掉前饋控制部分產生的位置偏差(本次試驗該誤差在100 mm左右),可實現主吊具準確快速對位自動著箱,提高自動化作業效率。
3 主吊具防扭控制
3.1 工況描述
考慮到目前常規橋吊均通過后大梁傾回轉液壓系統來控制主吊具傾回轉角度,此處采用控制油缸運動速度的方式來達到主吊具自動防扭的目的,整個系統的控制框架示意見圖3。
通過扭轉角度傳感器獲取吊具的實時位姿信息,并將其輸入到自動防扭控制器,控制器輸出直接驅動后大梁傾回轉油缸的伸縮運動,進一步通過調整吊具上架起升鋼絲繩的相對長度,實現吊具動態防扭補償目的。
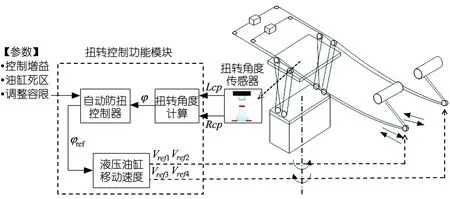
圖3 主吊具防扭控制框架示意圖
整個系統鋼絲繩纏繞復雜,系統柔性較大,后大梁液壓站油缸及比例控制閥具有非線性特性,系統輸出響應延遲較大,準確數學模型較難建立。因此采用帶死區補償的變增益PID控制策略,其中一個控制器負責吊具回轉角度控制,另一個控制器負責吊具油缸位置控制。控制器參數的獲取,通過辨識的油缸位移與擺角變化曲線,結合實際運行過程中的工作頻率獲得,并通過現場測試,加以確定。實際作業時,通過獲取后大梁油缸位移數據,經過控制器處理,輸出為4個油缸的給定速度信號,控制后大梁傾回轉油缸的伸縮運動。
3.2 防扭效果驗證
為驗證所設計控制器有效性,選取不同起升高度,不同吊具尺寸狀態進行防扭控制效果驗證。圖4為該控制策略在選定工況下各變量變化情況,從上往下依次為扭轉角度傳感器實時反饋值、防扭控制使能、后大梁4個油缸速度給定值。控制目標為±1.2°。
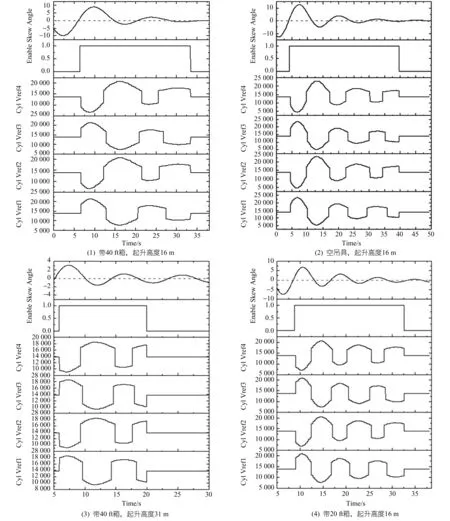
圖4 防扭控制驗證結果
從圖4中可以看出,吊具基本能在2個周期內實現自動防扭控制,而且后大梁油缸速度給定相對平緩,調整過程中不會出現油缸高頻率來回往返運動的情況,可有效避免通過開關量控制方式造成液壓系統發熱嚴重等問題,提高吊具自動對箱作業效率。
4 結語
實踐表明,所設計的防搖定位控制器能夠有效控制小車在加減速過程中產生的吊具搖晃問題,且小車到達目標位置時定位精準,滿足吊具自動著箱的要求。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
