淺談磁力儀結合多波束測深系統尋找
2020-05-13 14:10:05王文靜董慧
航海 2020年1期
王文靜 董慧

摘要:磁力儀能準確探測鐵磁物質所引起的磁異常,且不受空氣、水、泥沙等介質的影響,但由于其采用拖曳式測量,靈敏度高但定位精度較差。多波束測深系統測量過程中形成多個波束,可同時獲得上百個水深點,實現水下地形的全覆蓋測量,定位精度高但分辨率一般。結合磁力儀和多波束測深系統的特點,綜合應用于海底金屬障礙物的精確定位。應用結果表明,兩者結合使用,大大提高了海底金屬障礙物的判瀆和定位的準確性,證明該方法具有一定的可行性。
關鍵詞:磁力儀;多波束測深系統;海底金屬障礙物;精確定位
0 引言
在尋找海底金屬障礙物時,一般只清楚其所在的大致區域,其確切的位置需要通過測量手段獲取,以便于標記或者打撈。磁力儀能準確探測鐵磁物質所引起的磁異常,且不受空氣、水、泥沙等介質的影響,靈敏度高,可有效感知海底金屬障礙物,快速縮小障礙物的搜索范圍,但受其測量方法影響,無法準確獲知障礙物的位置。利用多波束測深系統的水深全覆蓋特點,對磁力異常區域進行掃測,將掃測數據建立格網形成三維模型,在三維模型上尋找異常點并標記位置,從而獲取海底金屬障礙物的準確位置。
1 系統構成
磁力儀主要有拖魚、控制器和定位系統構成,拖魚內置姿態、方位等傳感器,測量過程中可以實時了解拖魚的方向、入水深度等參數。多波束測深系統由探頭、定位系統、光纖羅經(提供姿態和艏向)、聲速剖面儀、控制器和高性能汁算機構成。
2 作業流程
首先,利用磁力儀對存在海底障礙物的區域進行磁力值探測,探測完成后,利用HYPACK軟件進行磁力值的色彩分區顯示,在此基礎上進行磁力異常區域的標記;其次,利用多波束測深系統進行磁力異常區域的掃測,并在掃測的數據基礎上構建三維模型,在三維模型上尋找異常點并標記出準確位置;最后,結合兩者的數據綜合判斷障礙物的形狀大小和位置。
3 實例應用
3.1 控制點比對
測量前必須在控制點上進行GNSS接收機的比對,比對差值須滿足測量規范要求。
3.2測線布設
磁法探測作業時按10m間隔布設測線,對實測時偏離計劃線大于4m的測線進行補測,以確保整個測區探測無遺漏和對可疑目標的重復探測,滿足規范要求。
待磁力異常區域確定后進行多波束測線布設,布設原則必須保證全覆蓋測量,相鄰條帶搭接l0%以上。
3.3設備安裝及要求
(l)磁力儀安裝及要求
磁力儀采用船艉拖曳方式進行,施放過程中保持船舶3-4kn低速勻速前進。由于采用船舶材質為鐵質,為消除船磁影響,保證施測效果,釋放長度需要大于3倍船長。
測量前在現場準確量測出DGPS接收機天線位置與磁力儀在船艉入水點之間的水平距離,確定好GPS天線與磁力儀探頭之間的固定偏差值,磁力儀施放完成后與導航定位系統聯機調試,保證了導航定位輸出的信號及磁力儀數據在磁力儀系統中正常的接收。
(2)多波束測深系統安裝及要求
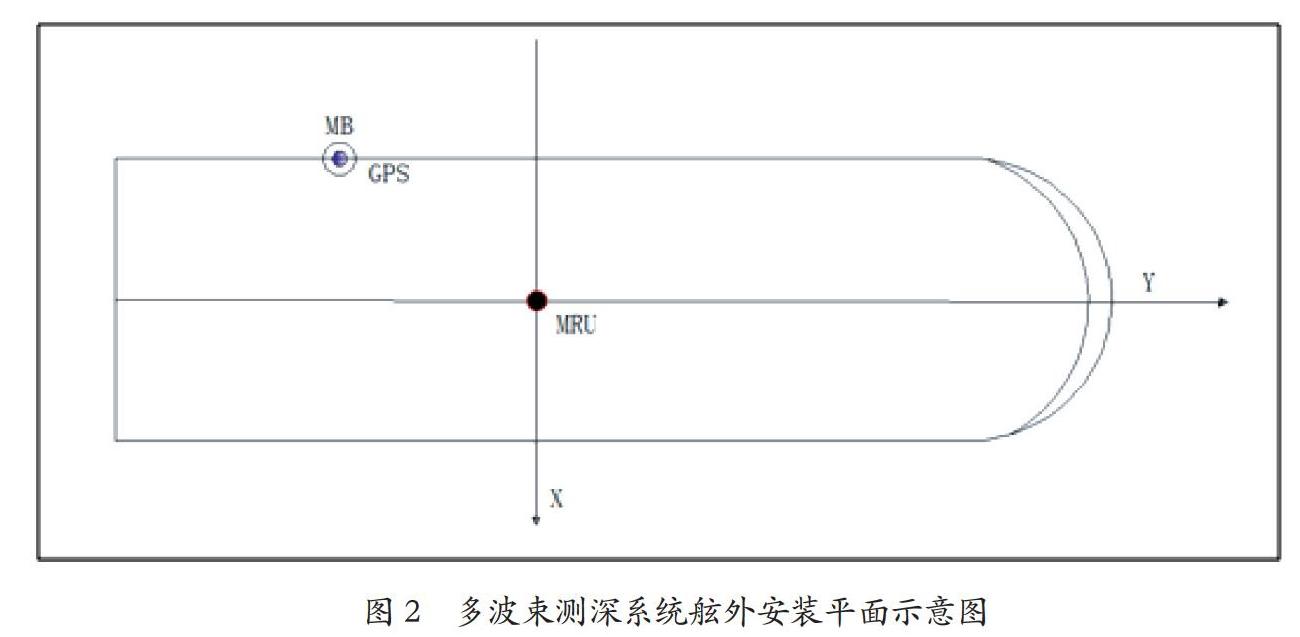
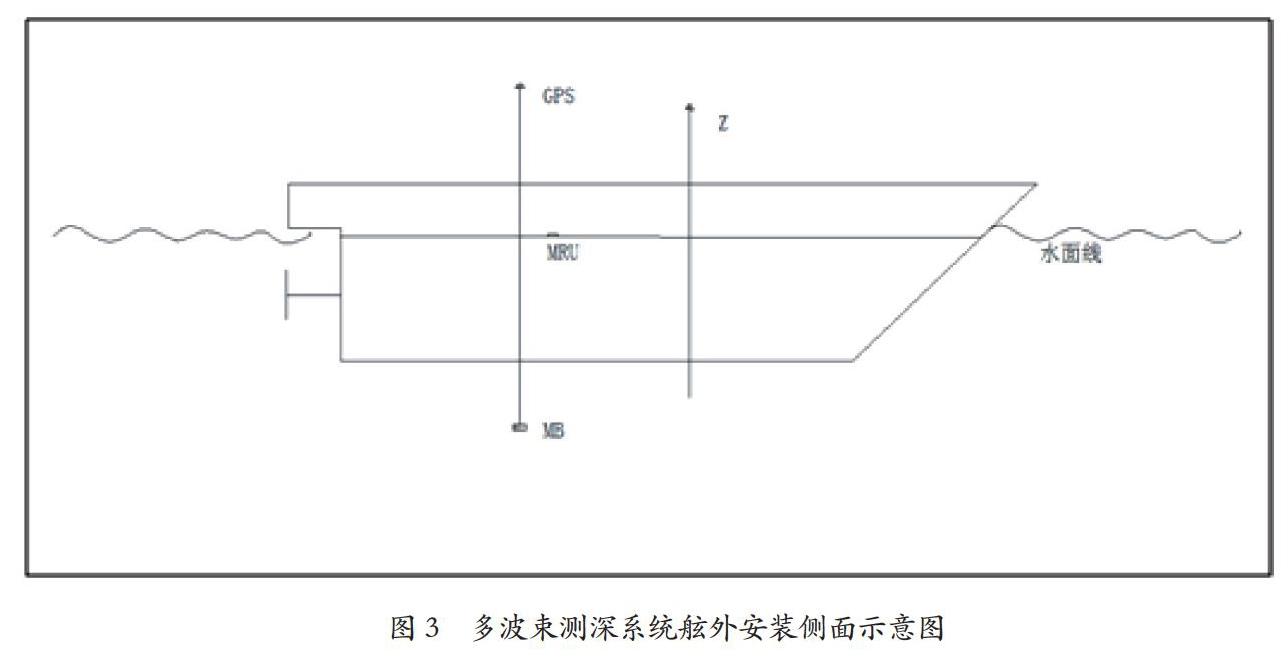
多波束換能器采用舷外臨時安裝方式,固定在距測量船艉li3相對穩定處;光纖羅經安裝在船舶軸線中心位置,其方向線平行于船的艏艉線,方向指向船艏方向;GPS天線安裝在換能器桿頂部。多波束測深系統舷外安裝平面和側面示意圖見圖2和圖3。
船體坐標系的建立:以安裝時換能器中心與水線的交點為船體坐標系參考原點;測船右舷方向為X軸正方向;測船船艏方向為Y軸正方向,垂直向上方向為Z軸正方向。船體坐標系建立以后,準確量取姿態傳感器、光纖羅經、GPS天線、換能器在船體坐標系中的位置參數。位置參數量取時,讀數至厘米,往返各一次,水平方向往返讀數互差小于5cm,豎直方向往返讀數互差小于2cm,限差范圍內,取平均值作為量取結果。
3.4數據采集
(l)磁力儀數據采集
進行數據采集時,設置正確的工作參數,同時根據測區環境實時進行參數調整,保證最佳探測質量。在作業過程中確保船舶勻速直線航行,船舶航行速度為3-4kn。
采集過程中,測量人員實時查看數據采集界面,發現磁力異常跳點時,立即進行識別、標記。對于磁力異常區域,排除船舶掉頭等影響后,需要對疑問區域進行加密測量,發現磁力異常的測線進行往返測量,以便分析、確定該磁力異常區域的范圍。
(2)多波束測深系統數據采集
數據采集前,仔細檢查系統設備是否工作正常;檢查系統設備參數設置是否正確;檢查測船坐標系統定義是否正確,系統設備安裝偏移值是否輸入正確;檢查吃水改正、聲速剖面文件、測量范圍文件、導航測線文件等是否正確。
多波束測深系統采用約1:4寬深比進行作業,施測過程中按照要求進行聲速剖面施測(剖面間距為0.5m),并及時在多波束測深系統實施改正。
數據采集中,實時監控系統各配套傳感器狀態、測深數據的覆蓋和測深信號的質量情況。當測深信號質量不穩定時,及時調整了多波束發射與接收單元的參數,使波束的信號質量處于穩定狀態。
3.5數據處理及成果分析 磁探測量完成后,將數據導出并進行編輯,生成的xyz文件
導入Hypack中,做成色塊圖加以區分分析,在排除船舶掉頭等影響因素后,找出磁力值明顯變化的區域并標記,如圖4所示。確定好磁力異常區域后,對該區域進行一定程度的擴展,進行對應區域的多波束測深數據處理并生成水下地形的三維模型,找尋并標記出障礙物的準確位置,如圖5所示。
應用實例表明,利用磁力儀結合多波束測深系統的方法是有效可行的,該方法利用了兩種設備的特點,可以快速、高效的確定海底金屬障礙物的準確位置,便于標識或者打撈。同時,在應用過程中發現,磁力儀設備對電壓的穩定性要求較高,電壓的波動很容易造成磁力值的異常變化,在今后的應用中需要多加注意。