基于車輛軌跡重構的信號交叉口延誤提取研究
2020-05-13 10:01:14張惠玲劉曉曉許裕東
交通運輸系統工程與信息 2020年2期
張惠玲,劉曉曉,許裕東
(1.山地城市交通系統與安全重慶市重點實驗室,重慶400074;2.重慶交通大學交通運輸學院,重慶400074)
0 引言
延誤是評價信號交叉口運行效率和服務水平的重要度量參數.受檢測技術等限制,傳統的延誤獲取方式為理論推算法和現場觀測法[1],理論推算法精度不高,現場觀測法難以持續觀測.隨著新技術的不斷推廣,車輛在交叉口的運行軌跡信息逐漸被應用在交叉口參數提取中.SUN等[2]通過短距離手機數據推導了車輛在交叉口延誤參數的獲取方法.Hao等[3]應用交通流理論等方法重構了車輛在進口道的運行軌跡,提取了信號交叉口排隊長度等參數.Cheng等[4]使用樣本車輛軌跡,借助車輛動力學模型分析了周期排隊長度的估計方法.Ban等[5]使用樣本車輛的行程時間和動力學模型,估算了信號交叉口的延誤參數.針對車輛軌跡數據:丁軍等[6]介紹了車路協同系統下的數據采集標準,以及軌跡數據特點;唐克雙等[7]借助微觀交通仿真軟件中車輛產生的過程,對定點檢測場景下的干道車輛軌跡重構方法進行了分析;Wang等[8]通過LWR模型,對信號交叉口浮動車和線圈設置下的排隊長度獲取方法進行了分析;張惠玲等[9-10]使用圖像處理、邏輯推導等方法對攝像頭場景下的交叉口延誤參數進行了分析.
交通管理部門在信號交叉口停車線附近設置了視頻監控設施,這些設施在發揮其原定功能的同時,為獲取紅燈期間前f輛到達車輛的軌跡信息提供了可能,也為豐富交叉口相關參數的獲取方式提供了現實基礎.本文以設置攝像頭的信號交叉口為研究對象,通過可以獲取的數據信息,借助相關方法確定車輛在交叉口運行的幾個關鍵點對應的時間,再對車輛的運行軌跡進行重構,提出交叉口延誤參數獲取的方法.
1 車輛運行軌跡分析及重構
1.1 車輛運行軌跡分析
車輛在信號交叉口的運行軌跡如圖1所示.受信號燈控制:紅燈啟亮后,第1輛車由自由行駛速度經歷減速在停車線前停止等候綠燈,后續到達的車輛也陸續減速并停止;綠燈啟亮后,第1輛車經歷啟動、加速,直至恢復正常行駛速度駛離交叉口,后續經歷停止的車輛也陸續加速并駛離交叉口.在停車線附近設置攝像頭的場景下,可以觀測到前f輛車的停車及啟動時間,以及本周期后續所有駛離車輛通過停車線的時間.

圖1 車輛在信號交叉口的運行軌跡圖Fig.1 Trajectory of vehicle at signalized intersection
1.2 關鍵點分析及其時刻確定
由上述運行軌跡分析可知,車輛在信號交叉口經歷的停止、啟動等過程可以描述為:開始減速,停車等待,啟動加速,恢復正常行駛速度.設定行駛車輛類型全部為小型車輛,分析車輛的運行軌跡,其核心在于確定車輛運行軌跡改變的4個點,即4個關鍵點,分別是第j+1輛車的減速時間,車輛停車時間點車輛啟動時間點,以及車輛恢復正常行駛速度點本文設定攝像頭獲取時刻為車輛的停車時刻,故先分析未進入攝像頭拍攝范圍的車輛停車時刻.
1.2.1 車輛停車時刻確定
設攝像頭可以獲取前f輛車的到達軌跡信息包括車輛開始減速、停止、啟動,以及恢復正常行駛速度的所有時間和位置信息,并獲取本周期所有車輛通過停車線的時間.通過圖像處理的相關方法,獲取前f輛車在攝像頭拍攝范圍內的運行軌跡.需要重構的車輛為第f+1輛及之后排隊的車輛軌跡.需要的信息還有交叉口的配時信息,攝像頭所觀測到的前f輛車到達交叉口及離開停車線的時間,以及攝像頭觀測到的交叉口進口道流量.
獲取信息后,按照圖2流程獲取未進入攝像頭拍攝范圍內停止車輛的停車時刻.

圖2 車輛停車時刻判斷流程圖Fig.2 Flow chart of vehicle stop time judgment
如圖2所示,推算車輛停車時刻的具體步驟如下:
Step 1對于需要檢測延誤的車道,新周期開始,即紅燈剛開始啟亮,提取攝像頭觀測到的前f輛車的車輛到達時刻,k′=1,…,f,以紅燈開始為該周期的0時刻,以及該周期綠燈相位內每一輛車車尾通過停車線的時刻
Step 2結合相關參數,在已知交叉口前f輛車到達時間的情況下,第j+1(此時令j=f)輛車的到達概率分布函數為

式中:pj+1為在lΔt內到達j+1輛車的概率;q為車輛的平均到達率(veh/h);為第j+1輛車到達的時刻(s).
Step 3Δt=1,其中,l為增長步長,Δt為時間間隔(s),n為自然整數.
Step 4取一個隨機數R,R∈[0,1].若R<Pj+1,則認為第j+1輛車在+lΔt時間到達,即第j+1輛車的到達時間為 Δt=1;否則,令l=l+1,直到滿足R<Pj+1,即推得
Step 5返回Step 2,重復Step 2~Step 4,計算所有經歷排隊車輛的到達時刻,即可得到車輛到達時刻信息.
根據上述步驟,推算每個周期經歷停車的車輛停車時刻.
1.2.2 車輛減速時間點
以車輛自由運行時的速度作為車輛自由行駛速度,車輛減速時刻,即車輛由自由行駛速度開始減速的時間點,就是車輛接近停車線的過程中開始產生延誤的時間點.
以自由速度行駛的車輛,在減速過程中經歷由快到慢的減速過程,減速之初減速度絕對值由0逐漸增大,減速之末減速度絕對值逐漸減小至0.在拍攝的交叉口視頻中,對車輛的運行軌跡進行提取,得到某輛車在減速過程中的速度變化情況,如圖3所示.

圖3 車輛減速變化過程Fig.3 Vehicle deceleration process curve
速度變化曲線與潘登等[11]分析結果相似,根據車輛減速特征,將車輛減速過程的速度變化近似為一種雙曲正弦函數,即

式中:v0為車輛自由行駛速度(km/h);k為車輛速度變化快慢參數;τ為車輛減速時間中點(s);v為車輛速度值(km/h);t為時間(s);Δv為大于0的微小增量常數(km/h).
根據式(2),k分別取值k1、k2的v-t曲線如圖4所示.
從圖4可以看出,可以通過k值調控曲線變化的快慢,在[0 ,τ]期間,車輛加速度絕對值逐漸增加,到τ時達到加速度絕對值的最大值;在[τ, 2τ]期間,車輛加速度絕對值逐漸減小,到2τ時加速度為0.
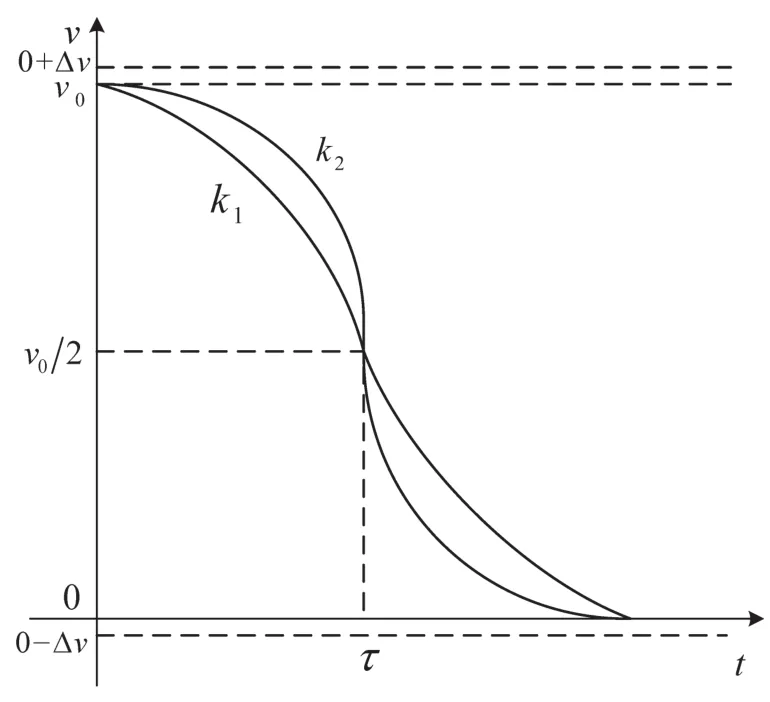
圖4 車輛減速v-t圖Fig.4 Vehicle deceleration(v-t)curve
在車輛初速度v0已知的條件下,可根據k值確定時間常數τ,即
當車輛由初速v0減速至末速0時,有

對式(2)積分得到,車輛從開始減速到停車的運行距離為
根據式(5)可知,在車輛初速、末速確定情況下,k值唯一,即確定了車輛的v-t曲線,從而確定了其自身的運行時間和距離.
根據式(2)得到車輛加速度為
由于cosh2[k(t-τ)] ≥1,由式(6)可知


1.2.3 車輛啟動時間點
車輛啟動時間點,即信號燈轉為綠燈后,車輛由停止狀態開始加速的時間點.根據HCM2010定義,第一車頭時距為綠燈開啟時刻到排隊頭車通過停車線的時間間隔,第二車頭時距為排隊頭車通過停車線的時刻到排隊中第2輛車通過停車線的時間間隔,隨后的車頭時距以此類推.4輛車后,經歷排隊的后續車輛以穩定的速度通過停止線,此時的車頭時距相對而言是一個常數h,那么車輛啟動時間間隔也同樣為一種常數.
本文背景為已知每個周期前4輛車到達及啟動時刻,且所有車輛均為小型客車,那么第5輛及之后車輛的啟動時刻為

1.2.4 車輛恢復正常行駛速度點
車輛恢復正常行駛速度點,即綠燈亮起后,車輛由加速運動轉變為正常勻速行駛的時間點.提取交叉口視頻中某輛車運行軌跡的啟動—恢復行駛過程,繪制車輛的v-t曲線,結果如圖5所示.
由圖5的曲線變化趨勢可以看出,該過程與二次曲線擬合效果較好,與相關研究得到的車輛加速過程的勻變加速的假設相吻合[12],由勻變加速直線運動方程可得

式中:v為車輛在起動加速過程中任意時刻的速度(m/s);為車輛在起動加速過程中加速度的變化率;a0為車輛初始加速度(m/s2).
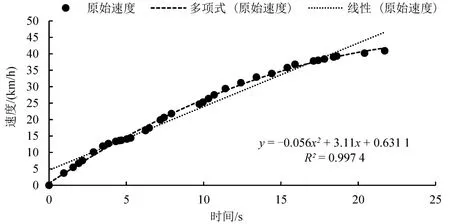
圖5 車輛加速典型速度特征曲線Fig.5 Vehicle acceleration typical speed characteristic curve
根據速度—加速度關系類比加速度與加速度變換關系,兩者之間基本呈線性關系,即

式中:a為車輛在起動加速過程中任意時刻的加速度(m/s2).
在車輛恢復正常行駛速度的時刻,加速度為0,速度為v0,帶入式(11)可得

式中:te為加速時間(s).
使用視頻中提取的速度數據,逐個間隔計算,得到每輛車在每個間隔的加速度變化情況,帶入式(12)計算得到車輛的加速時間.車輛恢復正常行駛速度的時間點為

2 交叉口延誤提取及實現
2.1 交叉口延誤提取
將在交叉口經歷停車的車輛軌跡重構之后,即可由延誤定義得到交叉口的延誤參數,具體計算模型為

2.2 實例分析
選取重慶市沙坪壩區西雙大道與永祥路信號控制交叉口進行實例驗證.考慮視頻拍攝的范圍要求及攝像機架設的可行性,視頻拍攝地點選擇在交叉口的東進口道,選定區域如圖6所示.

圖6 交叉口斷面位置及數據提取區域Fig.6 Intersection section location and data extraction area
考慮排隊車輛數、排隊車輛類型,選取東進口道兩條直行道提取車輛運行的軌跡數據,即圖6中方框所示范圍.
使用車輛軌跡獲取軟件提取拍攝視頻中車輛的真實軌跡信息[13].拍攝前,測量或記錄現場地面標記物之間的距離信息,在提取軟件操作界面,數據提取人員將標記的地面標記物與視頻中看到的同樣標記物進行核對,并輸入現實標記物之間的距離信息,實現圖像像素與現實坐標的標定與轉換.標定之后增加目標車輛,人工操作進行視頻播放與跟蹤,提取車輛在每0.1 s間隔的速度、坐標、加速度等信息.使用該軟件提取研究范圍內每輛車的軌跡數據,將數據導入Excel表格進行整理,結合交叉口信號燈轉換信息,提取該周期內所有車輛軌跡數據,為驗證重構方法提供基礎數據.該軟件對車輛軌跡的提取精度可以達到0.1 s[13].
(1)車輛重構軌跡與視頻軌跡對比.
提取周期內車輛到達方式為自由到達,故在停車時刻點確定時,選取泊松分布函數,對第5輛車及之后車輛軌跡進行重構,與真實的軌跡信息進行對比,得到某周期車輛行駛的重構軌跡與視頻軌跡,如圖7所示.
由圖7可知,在減速階段前,視頻中車輛軌跡的速度比重構車輛軌跡的速度快;在減速階段,重構軌跡車輛減速在開始時較快,后期較慢,總體與原軌跡比較契合,但后幾輛車的停車位置有一些小誤差,這是因為后幾輛車的停車位置為估算值;在加速階段,重構軌跡車輛在開始時加速度較大,與模型相符.

圖7 重構軌跡與視頻軌跡圖Fig.7 Reconstructed trajectory and video trajectory
(2)延誤對比.
根據重構軌跡,對車輛延誤進行提取,參數結果如圖8所示.

圖8 實際視頻數據延誤推算及對比Fig.8 Actual video data delay calculation and comparison
由圖8可知,周期車輛的延誤誤差整體可以接受,最大誤差為18.6%,誤差均值為6.82%.
3 結論
以信號交叉口設置攝像頭為背景,對可獲取信息的潛在應用價值進行探索,研究結論為:確定交叉口車輛運行軌跡的關鍵點為車輛開始減速、停止、開始啟動,以及恢復正常行駛速度幾個關鍵點;分別應用獲取的前一輛車信息,車輛的到達函數分布,車輛減速滿足的雙曲正弦函數,飽和車頭時距,以及加速過程滿足勻加速等,確定未獲取信息的車輛停止、開始減速、啟動,以及恢復正常行駛速度等關鍵點的時間信息;通過確定的關鍵點時間信息,重構車輛運行軌跡,并給出延誤獲取的方法.對于高峰期進口道過飽和情況下,關鍵點確定和車輛運行軌跡重構將是后續研究的主要方向之一.
猜你喜歡
中國交通信息化(2022年9期)2022-10-28 06:14:40
城市軌道交通研究(2022年4期)2022-04-16 02:59:18
汽車工程師(2021年12期)2022-01-18 06:02:43
山東科學(2021年3期)2021-06-10 06:50:56
重慶交通大學學報(自然科學版)(2017年3期)2017-05-17 03:37:32
城市道橋與防洪(2016年7期)2016-11-18 02:28:44
中國房地產業(2016年2期)2016-03-01 01:25:37
汽車維修與保養(2015年8期)2015-04-17 03:32:59
系統工程學報(2015年3期)2015-02-28 19:54:01
河南科技(2014年14期)2014-02-27 14:12:02