一種建筑垃圾分揀機(jī)器人的設(shè)計(jì)
2020-05-11 12:24:30房劍飛吳金文袁祖強(qiáng)
數(shù)字技術(shù)與應(yīng)用 2020年2期
房劍飛 吳金文 袁祖強(qiáng)

摘要:隨著社會(huì)經(jīng)濟(jì)的發(fā)展,建筑垃圾已經(jīng)成為了城市發(fā)展的負(fù)擔(dān),建筑垃圾資源化利用研究已經(jīng)成為熱點(diǎn)。本課題設(shè)計(jì)了一種桁架式建筑垃圾分揀機(jī)器人,快速有效地進(jìn)行垃圾分揀,達(dá)到智能識(shí)別、自動(dòng)分揀的目的,減輕了人工勞動(dòng)強(qiáng)度,提高了資源利用率。
關(guān)鍵詞:建筑垃圾;分揀;機(jī)械手
中圖分類(lèi)號(hào):TP242 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):1007-9416(2020)02-0163-02
0 緒論
隨著社會(huì)的進(jìn)步,經(jīng)濟(jì)的發(fā)展,建筑垃圾圍城現(xiàn)象屢見(jiàn)不鮮。但建筑垃圾其實(shí)是一種“放錯(cuò)地方的資源”,已經(jīng)引起了社會(huì)和科研的重視。當(dāng)前建筑垃圾主要依靠人工方式分揀、填埋,方式傳統(tǒng)粗獷,效率低,甚至引起環(huán)境污染。雖然也有一些基于風(fēng)選技術(shù)或者其他特殊手段的大型篩選機(jī)械設(shè)備,但是也存在篩選不準(zhǔn)確,分揀不干凈等弊端。基于機(jī)械電子技術(shù)的分揀機(jī)器人,能夠很大程度地減少工人勞動(dòng)強(qiáng)度,實(shí)現(xiàn)分揀的自動(dòng)化和智能化,是一種有效的建筑垃圾處理手段。
國(guó)外發(fā)達(dá)國(guó)家早年就開(kāi)展了這方面的研究,目前也擁有了相對(duì)成熟的技術(shù)。譬如日本Shitara Kousan廢棄物處理廠通過(guò)擁有擬人化手臂的智能機(jī)器人,基于各類(lèi)光學(xué)傳感器對(duì)垃圾進(jìn)行掃描檢測(cè),能夠有效地識(shí)別建筑垃圾中的金屬、塑料凳各類(lèi)材料。芬蘭ZenRobotics公司設(shè)計(jì)的分揀機(jī)器人通過(guò)三維掃描器、金屬、光學(xué)、重量等多種傳感器進(jìn)行材質(zhì)數(shù)據(jù)信息的收集、訓(xùn)練,能夠高精度分揀不同類(lèi)的垃圾碎片。我國(guó)目前擁有的建筑垃圾分揀技術(shù)還不夠成熟,就應(yīng)用方面更多地還是依賴(lài)于自動(dòng)化程度較低,分揀效率和效果較差的振動(dòng)篩技術(shù)。本課題將設(shè)計(jì)一種桁架式建筑垃圾分揀機(jī)器人的機(jī)械結(jié)構(gòu),以能夠更加快速有效分揀建筑垃圾,達(dá)到智能分揀、自動(dòng)分揀、再生利用建筑垃圾的目的。
1 總體方案設(shè)計(jì)
1.1 基礎(chǔ)技術(shù)參數(shù)確定
機(jī)器人自由度、坐標(biāo)形式、有效負(fù)載、工作范圍、規(guī)格參數(shù)等基礎(chǔ)技術(shù)參數(shù)決定了機(jī)器人的特性。結(jié)合研究對(duì)象以及實(shí)際應(yīng)用進(jìn)行建筑分揀機(jī)器人基礎(chǔ)技術(shù)參數(shù)的確定。
1.1.1 自由度
無(wú)論什么形式的機(jī)器人,自由度的數(shù)量直接決定了其靈活程度。自由度越多,靈活性越強(qiáng),但相應(yīng)的結(jié)構(gòu)越復(fù)雜,重量越大,控制難度也越大。一般而言,桁架式機(jī)器人有5到6個(gè)自由度即可滿(mǎn)足其使用要求。基于建筑垃圾分揀機(jī)器人應(yīng)用場(chǎng)合,本次設(shè)計(jì)的機(jī)器人主要包括X向和Z向的直線(xiàn)運(yùn)動(dòng),縱向的旋轉(zhuǎn)運(yùn)動(dòng),分揀手爪的開(kāi)合運(yùn)動(dòng)。
1.1.2 坐標(biāo)形式
機(jī)器人坐標(biāo)形式多樣,從常見(jiàn)的直角坐標(biāo)系、圓柱坐標(biāo)系、關(guān)節(jié)型坐標(biāo)系到結(jié)構(gòu)復(fù)雜的SCARA型和并聯(lián)型。建筑垃圾分揀過(guò)程中,希望機(jī)器人能夠操作簡(jiǎn)單,結(jié)構(gòu)穩(wěn)定,移動(dòng)位置精度高,所以綜合考慮選擇直角型坐標(biāo)系。
1.1.3 有效負(fù)載
本次設(shè)計(jì)對(duì)象主要完成建筑垃圾的分類(lèi)和目標(biāo)抓取工作,考慮到作用對(duì)象的質(zhì)量,保證作業(yè)的高效穩(wěn)定,設(shè)定有效負(fù)載為10kg。
1.1.4 工作范圍
機(jī)器人工作范圍通過(guò)工作空間來(lái)表示,主要根據(jù)機(jī)器人操作范圍和運(yùn)動(dòng)軌跡來(lái)確定。根據(jù)作業(yè)要求,設(shè)計(jì)機(jī)器人的橫向和縱向的工作范圍為5m×3m。
1.2 結(jié)構(gòu)設(shè)計(jì)
分揀機(jī)器人采用桁架式結(jié)構(gòu)進(jìn)行設(shè)計(jì),結(jié)構(gòu)圖如圖1所示,由立柱、橫梁、托板、豎軸等幾部分組成。立柱是分揀機(jī)器人最基本構(gòu)件,與橫梁連接,固定在地面上,選擇方鋼管作為立柱。橫梁置于立柱上方,是機(jī)器人的重要承重部件,作為機(jī)器人的X軸,其剛度和強(qiáng)度決定了機(jī)器的精度,材料選擇Q235鋼。豎軸是機(jī)器人的Z軸,下方安裝機(jī)械手爪,實(shí)現(xiàn)機(jī)械手上下運(yùn)動(dòng)。托板兩部分互相垂直,呈現(xiàn)L型,分別于橫梁和豎軸平行連接。
機(jī)器人運(yùn)動(dòng)過(guò)程中,利用步進(jìn)電機(jī)帶動(dòng)齒輪運(yùn)動(dòng),齒輪與橫梁和豎軸上的齒條相嚙合,實(shí)現(xiàn)水平和上下移動(dòng),水平方向的移動(dòng)為X軸運(yùn)動(dòng),上下方向的移動(dòng)為Z軸運(yùn)動(dòng)。移動(dòng)過(guò)程中通過(guò)安裝限位器,控制移動(dòng)范圍。最后機(jī)械手爪負(fù)責(zé)抓取物體。
2 關(guān)鍵部件設(shè)計(jì)
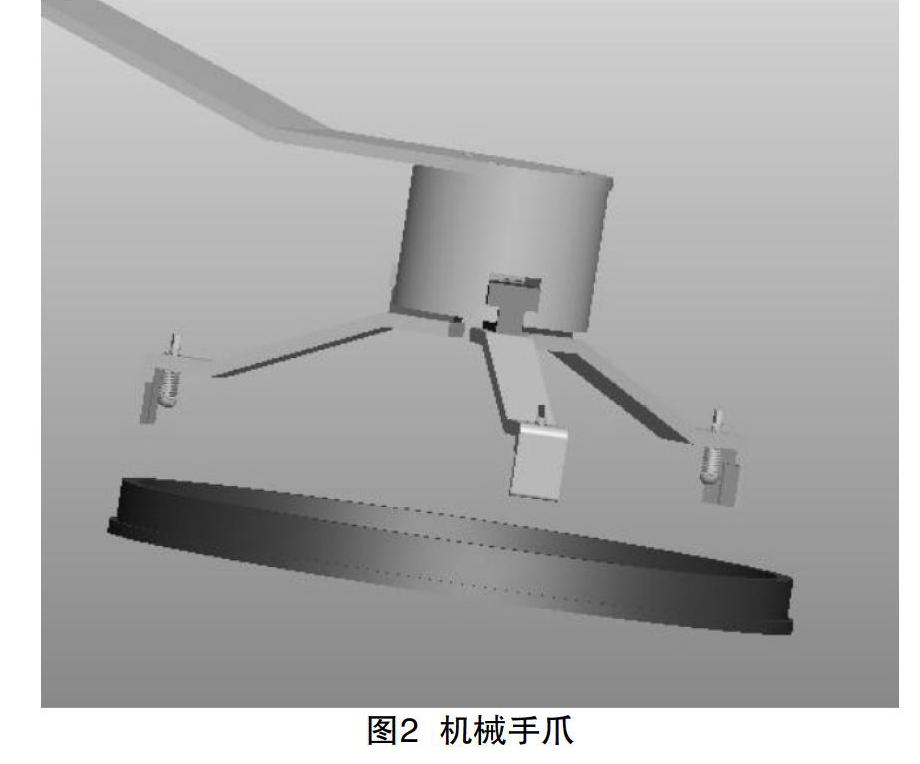
機(jī)械手爪主要用于抓取和握持物體,是工業(yè)機(jī)器人尤其是分揀機(jī)器人的關(guān)鍵部件。從功能性出發(fā),要求機(jī)械手爪機(jī)構(gòu)簡(jiǎn)單,工作靈活,輸出力適中。因此設(shè)計(jì)機(jī)械手爪最大輸出力大小為10kg,驅(qū)動(dòng)方式選擇氣動(dòng)方式。機(jī)械手爪設(shè)計(jì)為如圖2所示的三爪定心結(jié)構(gòu),抓取類(lèi)型為直線(xiàn)平移運(yùn)動(dòng)形式,由氣缸提供動(dòng)力,氣缸選擇結(jié)構(gòu)簡(jiǎn)單,易于制作的MHS3-40型氣缸。
3 控制流程設(shè)計(jì)
根據(jù)控制系統(tǒng)模塊化功能需求分析,控制系統(tǒng)分為視覺(jué)模塊、信息采集模塊、主控制模塊、動(dòng)作處理模塊四大部分。系統(tǒng)上電處理后,系統(tǒng)程序初始化調(diào)試,機(jī)械手臂處于零位,準(zhǔn)備進(jìn)行工作。傳送帶裝載垃圾進(jìn)行傳輸,進(jìn)入到視野區(qū)域后,視覺(jué)模塊循環(huán)工作,控制工業(yè)相機(jī)連續(xù)拍照,圖像信息經(jīng)過(guò)一定處理,結(jié)合信息采集模塊得到的傳感器等信息傳送至主控制模塊進(jìn)行處理分析,獲得垃圾位置及材質(zhì)等有用信息。當(dāng)光電傳感器顯示垃圾已經(jīng)達(dá)到機(jī)械人處理位置時(shí),主控制模塊通過(guò)調(diào)用動(dòng)作處理模塊,實(shí)現(xiàn)機(jī)械手跟蹤抓取指定目標(biāo)垃圾。
4 總結(jié)
智能分揀機(jī)器人的研究有利于實(shí)現(xiàn)建筑垃圾的精細(xì)化處理,降低了人工勞動(dòng)強(qiáng)度,提高了生產(chǎn)效率,是一種高效安全的垃圾分揀手段,在建筑垃圾資源化處理方面具有重要的價(jià)值和意義。
參考文獻(xiàn)
[1] 賀雅琴.自動(dòng)物料分揀機(jī)器人系統(tǒng)的關(guān)鍵技術(shù)研究[D].廣州:華南理工大學(xué),2011.
[2] 鄭先報(bào).建筑垃圾機(jī)器人分揀技術(shù)研究[D].泉州:華僑大學(xué),2019.
[3] 朱金權(quán).桁架式機(jī)器人的機(jī)械設(shè)計(jì)與研究[J].中國(guó)新技術(shù)新產(chǎn)品,2014(17):18-21.
[4] 靳璞磊.基于智能相機(jī)和工業(yè)機(jī)器人的自動(dòng)分揀技術(shù)研究[D].南京:南京航空航天大學(xué),2016.
Design of? a Construction Waste Sorting Robot
FANG Jian-fei,WU Jin-wen,YUAN Zu-qiang
(Pujiang College, Nanjing University of? Technology, Nanjing? Jiangsu? 211100)
Abstract:With the development of social economy, construction waste has become a burden on urban development, and research on the utilization of construction waste resources has become a hot spot. This project designed a truss-type construction waste sorting robot to quickly and effectively perform waste sorting, to achieve the purpose of intelligent identification and automatic sorting, reduce manual labor intensity, and improve resource utilization.
Key words:construction waste; sorting; manipulator
 數(shù)字技術(shù)與應(yīng)用2020年2期
數(shù)字技術(shù)與應(yīng)用2020年2期
- 數(shù)字技術(shù)與應(yīng)用的其它文章
- 智能化急救包管控系統(tǒng)的研究
- 網(wǎng)絡(luò)平臺(tái)和技術(shù)開(kāi)發(fā)相結(jié)合 拓展貴重儀器科研潛能
- 區(qū)塊鏈數(shù)字貨幣的技術(shù)特性及其在支付領(lǐng)域的應(yīng)用
- 虛擬專(zhuān)用網(wǎng)絡(luò)技術(shù)在計(jì)算機(jī)網(wǎng)絡(luò)信息安全中的應(yīng)用
- 試析基于CDT的電力自動(dòng)化數(shù)據(jù)解析軟件設(shè)計(jì)
- 一種教師用智能點(diǎn)到系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)