半球諧振陀螺靜電驅動建模與分析
2020-05-10 04:28:24蔣春橋林丙濤嚴隆輝
壓電與聲光 2020年2期
文 路,江 黎,蔣春橋,林丙濤,嚴隆輝
(中國電子科技集團公司第二十六研究所, 重慶 400060)
0 引言
半球諧振陀螺(HRG)是一種具有慣導級性能的高精度新型固態陀螺儀,因其具有無高速轉子、無軸承和摩擦相關部件,結構簡單,壽命長,可靠性高及抗輻照等優點,故適合在空間、戰略武器等領域使用[1]。目前國內已在宇航[2]和導彈等領域展開了相關技術的研究[3]。
HRG主要有兩種工作模式:
1) 全角模式。直接檢測角度,具有大頻帶寬和動態范圍的特性。
2) 力反饋或力再平衡模式。陀螺輸出為速率,具有高的角度分辨率。在力反饋模式下,陀螺輸出值與驅動電壓的大小相關。
HRG驅動電壓的隨機噪聲表現為HRG的隨機漂移[4]。HRG的主要指標受驅動電壓的影響,因此,驅動電壓的特性部分決定了HRG的性能。本文對HRG的靜電力驅動方式進行了研究。
1 HRG基本原理
HRG主要由半球形諧振子、靜電激勵罩和敏感讀出基座組成(見圖1),其中半球形諧振子是陀螺的核心敏感部件,具有高品質因數Q值和穩定的固有振動頻率。
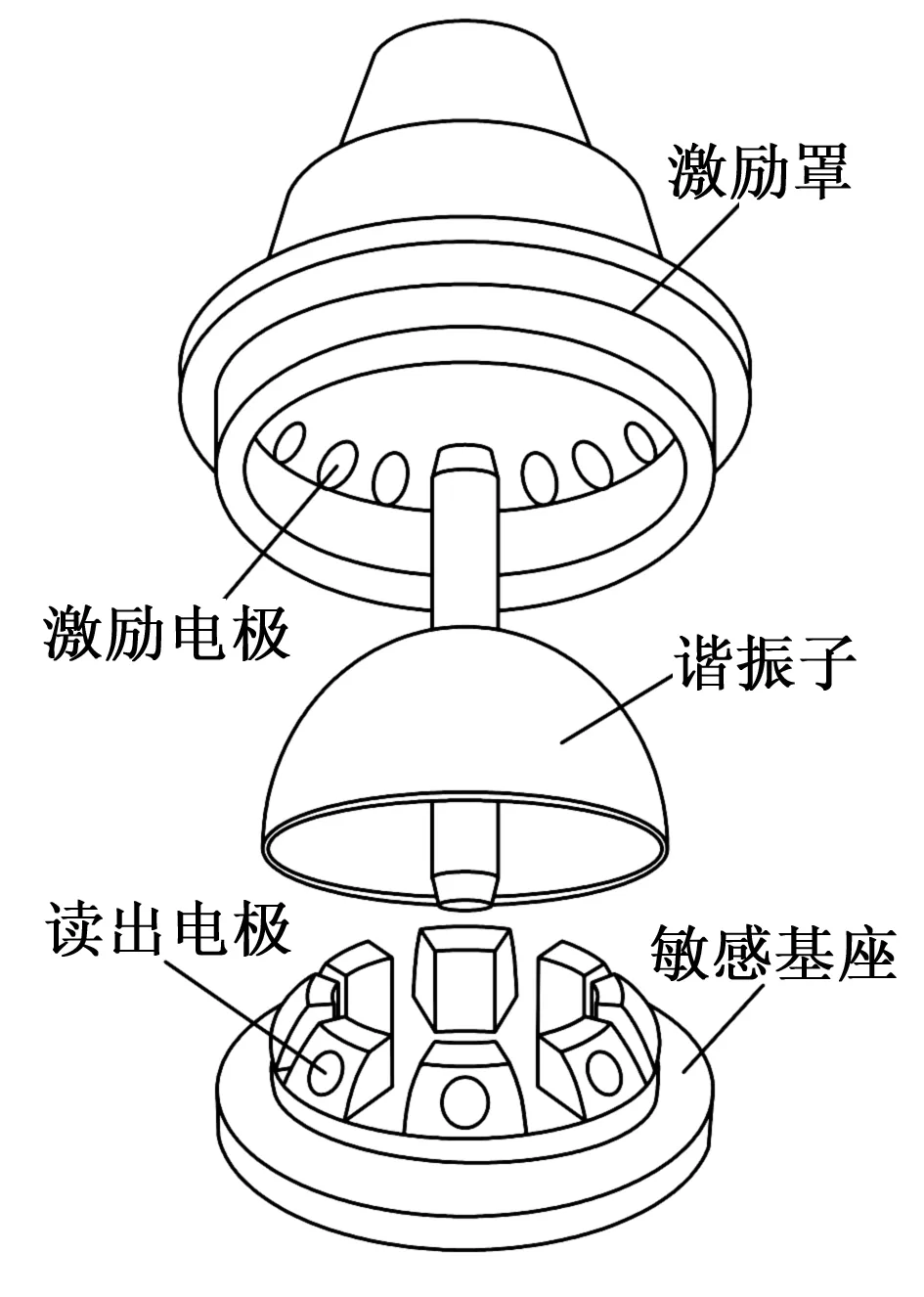
圖1 HRG結構圖
將陀螺的半球形諧振子、靜電激勵罩和敏感讀出基座焊接在一起,固封在一個高真空的容器中,組裝成一個角度或角速度傳感器。靜電激勵罩上分布數個離散電極,與諧振子球面形成數個電容,靜電高壓通過這些電容產生諧振子振動所需的力,形成諧振子微振動。敏感讀出基座上等角度分布數個電極,一般設置為8個,用于檢測出諧振子的振動波形,解算后得出傳感器的旋轉角度或角速度。同時,計算用于控制半球陀螺振動波形的幅度和正交信號,并通過離散激勵電極施加控制[5]。
2 激勵電極施力分析
用于驅動半球諧振子的電壓通常有兩種:
1) 使用與諧振子諧振頻率相同的方波電壓信號驅動,俄羅斯目前采用這種方式驅動半球諧振陀螺。
2) 使用與諧振子諧振頻率相同的正弦波電壓信號驅動,美國目前使用這種方式驅動半球諧振陀螺。
假設驅動電壓U施加在激勵電極上,諧振子的外表面與驅動電極的電壓差為U0,激勵電極到諧振子外表面的距離為d0,則激勵電極到諧振子外表面的電場強度為
E=(U0-U)/d0
(1)
假設激勵電極和諧振子外表面間的電容為C,激勵電極的面積為S,介質的介電常數為ε,近似認為激勵電極和諧振子外表面間的電容為平板電容,則
C=εS/d0
(2)
激勵電極和諧振子外表面間積累的電荷量為
Q=C(U0-U)
(3)
則諧振子受靜電引力為
F=EQ=(U0-U)/d0×C(U0-U)=
(4)
假設半球諧振子振幅為d1,諧振子的諧振頻率為ω,時間為t,則激勵電極和諧振子外表面的間距為
d=d0-d1sin(ωt)
(5)
此時半球諧振子受靜電引力為
(6)
(7)
2.1 1/2倍諧振頻率正余弦波電壓信號驅動方式
當使用1/2倍頻率正弦波電壓信號驅動諧振子時,設U=U1sin(ωt/2),則諧振子受力為
(8)
展開可得:

(9)
在式(9)中常數項和高次項對于高Q值諧振子的諧振無作用,得到有效的驅動力為
主流意識形態認同是社會成員對主流意識形態的承認、接受、和共享,具體體現在主體對主流意識形態的認知、情感和評價等話語體現。目前,我國社會的主流意識形態主要存在政治話語、學術話語和大眾話語三種形式,這三種話語在網絡空間中形成相互交織的共存狀態。可“微時代”擠壓了大學生主流意識形態認同的空間,所以大學生對政治缺乏熱情和興趣。同時,學術話語太抽象,除了特別專業的學生學習之外,大部分學生都不感興趣,幾乎沒有人會對它提出自己的看法。此外,“微文化”碎片化、大眾化、快餐化的特點導致了微文化的虛假性,它的娛樂性吸引了大學生,縮小了大學生對主流意識形態空間的認同。
(10)
式(10)中,sin (ωt)項為改變諧振子的振動頻率力(f1),cos (ωt)項為驅動諧振子諧振力(f2),即
(11)
(12)
在半球諧振陀螺加工完成后,ε、S、d0項即可確定。驅動力f2與驅動電壓U1的平方成正比,可用于控制諧振子的振動。
當使用1/2倍頻率余弦波電壓信號驅動諧振子時,設U=U1cos(ωt/2),諧振子受力為
(13)
式(13)展開可得:

(14)
在式(14)中常數項和高次項對高Q值諧振子的諧振無作用,得到的有效驅動力為
(15)
式(15)中,sin(ωt)項為改變諧振子振動頻率力(見式(11)),cos(ωt)項為驅動諧振子諧振力,即
(16)
因f2與U1的平方成正比,故可用于控制諧振子的振動。
2.2 1倍諧振頻率余弦波電壓信號驅動方式
當使用1倍頻率余弦波電壓信號驅動諧振子時,設U=U1cos(ωt),諧振子受力為
(17)
式(17)展開可得:
(18)
在式(18)中常數項和高次項對于高Q值諧振子的諧振無作用,得到的有效驅動力為
(19)
式(19)中,改變諧振子的振動頻率力及驅動諧振子諧振力分別為
(20)
(21)
因f2與U0、U1成正比,故可使用該方法驅動諧振子振動。
2.3 2倍諧振頻率正弦波電壓信號驅動方式
當使用2倍頻率正弦波電壓信號驅動諧振子時,設U=U1sin(2ωt),諧振子受力為
(22)
式(22)展開可得:
(23)
在式(23)中常數項和高次項對高Q值諧振子的諧振無作用,得到的有效驅動力為
(24)
式(24)中,改變諧振子的振動頻率力見式(11),驅動諧振子諧振力為
(25)
f2與U0、U1和d1成正比,當諧振子未起振時,使用2倍諧振頻率的電壓信號驅動諧振子無效果;諧振子起振后,使用2倍諧振頻率的電壓信號可維持諧振子的振動。
2.4 3倍及以上諧振頻率正弦波電壓信號的作用
當使用n(n≥3)倍頻率余弦波電壓信號驅動諧振子時,設U=U1cos (nωt),諧振子受力為
(26)
式(26)展開可得:

(27)
式(27)中改變諧振子的振動頻率力見式(11),產生的其余項目均為高次項和常數項,不能控制諧振子的諧振。
由以上推導可知,在僅考慮諧振子振動的一階成分,忽略振動的高次項,施加電壓信號為3倍及以上諧振頻率時,不能產生驅動諧振子諧振的力。
3 結果與分析
對比式(10)、(15)、(19)、(24)可知,使用1倍、2倍諧振頻率驅動半球諧振子時,在諧振子外表面和驅動電極間必須有直流電壓差U0;使用1/2倍諧振頻率驅動半球諧振子時,此直流電壓不是必須的。諧振子外表面和驅動電極間的直流電壓會促進諧振子的正交振動。
使用1倍諧振頻率驅動半球諧振子的施力效率最高。施力與諧振子振幅無關,與驅動電壓幅度成正比。施力與驅動電壓幅度的線性關系決定了力在平衡模式HRG輸出的線性關系[4]。
當d1?d0時,使用2倍諧振頻率驅動半球諧振子的施力效率最低。施力與諧振子振幅線性相關,與驅動電壓幅度成正比,適用于諧振子起振后的穩幅控制。
使用1/2倍諧振頻率驅動半球諧振子的施力效率介于1倍、2倍諧振頻率間,與諧振子的振幅無關,施力大小與驅動電壓幅度的平方成正比。當諧振子外表面電壓U0=0,且以V1代替U1,則式(10)、(15)分別變為
(28)
(29)
1倍諧振頻率驅動方式的施力為
(30)
若要輸出相等的力,因為:
(31)
則有:
(32)
所以1/2倍諧振頻率驅動方式產生的正交振動驅動力不大于1倍諧振頻率驅動方式;且1/2倍諧振頻率驅動方式不需施加直流電壓,其電路結構相對簡單。
4 結束語
本文構建了半球諧振陀螺諧振子的靜電驅動模型,理論推導并計算了使用不同電壓信號驅動諧振子產生的力,分析了不同驅動方式的特點。分析結果對驅動電壓信號的選擇和力反饋輸出信號的處理具有指導意義。實際中半球諧振陀螺由于移相誤差、信號耦合及非線性等因素會對施力結果產生影響,在靜電驅動模型中未考慮這些因素。進一步的研究可在此基礎上進行模型擴展,以得到更精確的模型。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
