極限學習機在耙吸挖泥船產量預測中的應用
2020-05-08 07:36:54關放王蔚
科技與創新 2020年8期
關放,王蔚
極限學習機在耙吸挖泥船產量預測中的應用
關放1,王蔚2
(1.中港疏浚有限公司市場部,上海 200120;2.中港疏浚有限公司湛江分公司,上海 200120)
在耙吸式挖泥船的施工作業中,疏浚土的土質變化、水下作業環境變化會造成許多土的特性無法得到準確數值,對實際施工量的準確測量產生了巨大的阻力,且耙吸式挖泥船施工量的準確、有效性直接關系到一個企業的經濟效益。針對以上實際問題,利用極限學習機算法以及極限學習機的一些改進算法,根據耙頭運作的實際原理,為耙頭構建新的預測模型,通過對模型的分析,為實際施工中模擬出產量預測模型分布。
極限學習機;耙吸式挖泥船;產量預測;黑箱模型
經過對以往的預測產量的模型,其中包括黑箱模型、遺傳BP神經網絡的分析,可以看出這兩個模型在引入實際參數中后,通過驗證研究與對比過后,所得出的數據皆不能達到生產中所需要的理想模型。
1 耙頭疏浚機理分析與密度預測模型
1.1 耙頭疏浚機理分析
耙吸式挖泥船的耙頭是整個船舶的重要組成,耙頭由特殊的的耙齒和耙臂組成,耙頭在實際工作中,會將泥沙混合成泥水混合物,在通過耙頭與耙臂連接的泥泵,把這些泥水混合物吸入船艙。
這個過程是十分復雜的,如果要直接觀察這個過程,是難以直接建模的。現在還沒有一個完整、完善的數字模型能精準描述這個過程中耙吸式挖泥船的產量。
根據實際經驗分析,對于同一艘耙吸式挖泥船來說,耙頭的工作狀態以及泵入的泥水混合物是決定疏浚實際產量的重要因素。但實際情況會受到很多其他因素的影響,因此,作業數據中分析建模也有它的局限性,本章只分析相同疏浚工況下耙頭的工作狀態對耙頭產量的影響。
1.2 密度預測模型
通過上述分析可知,耙頭吸入泥水混合物是決定耙吸式挖泥船產量的重要因素,并依據此重要決定因素來構建預測模型。依據耙吸式挖泥船自帶的傳感器得到一些參數,例如吸入泥水混合物的流速、流量、航速等相關數據參數。基于這一點依照輸入輸出的原理,作為構建極限學習機的方法進行建模,將耙頭控制與工作產量建立關系。其整體框圖如圖1所示。
2 極限學習機
什么是極限學習機,它是神經網絡的一種,它與傳統的 BP神經網絡結構機理相同,如圖2所示,但極限學習機有它的獨特之處,有自己的訓練方法。

圖1 預測模型
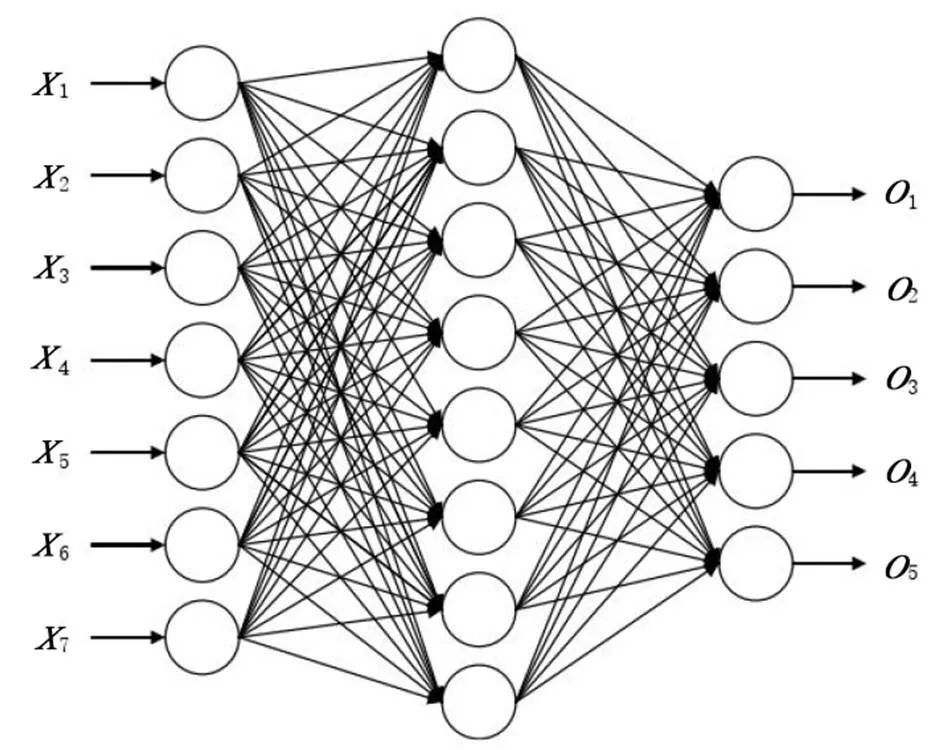
圖2 神經網絡結構
3 固定型極限學習機


在耙吸式挖泥船實際作業中會產生巨量的數據,應考慮對這些數據進行篩選學習,還是將所有數據統一作為樣本進行學習,使得極限學習機在處理比較龐大的數據時,一般情況下隱層神經元的數量均少于數據數量,這種情況會導致為非方陣。

其中,+為的Moore-Penrose廣義逆,一般可以通過正交法計算求得。
上述的極限學習機在設置隱層神經元個數后網絡結構是無法改變的,所以又被稱為固定型極限學習機(ELM)。固定型極限學習機的學習步驟便可以概括為:
式(2)中:2為隱藏節點層到輸出向量的權重矩陣;為激活函數;1為輸入向量到隱藏節點層的權重矩陣。
用隨機產生的高斯噪聲給矩陣1的每個元素賦值;用最小二乘法估計使期望輸出與實際輸出誤差最小的輸出權重矩陣2,數學上能夠證明計算隱藏節點層輸出矩陣的廣義逆即2=(1)T。
3.1 極限學習機網絡增量型
上述的極限學習機是固定的,對于網絡的結構要求比較簡單,神經元的數量是決定學習訓練的唯一參數,在實際生產中由于樣本數量比較龐大,而且數據樣本的差異性較大,極限學習機在學習工程中需要反復糾錯,造成自我學習效率低下。在實際操作過程中往往需要人工反復調試,而且不能找到有效的隱層神經元的具體數量,無效的隱層神經元會導致預測的準確度大大降低,其實際效果較差。為了解決這一問題,在固定型極限學習機的基礎上加以改進,并提出了增量型極限學習機(I-ELM)這一類型。
增量型極限學習機的核心思想是通過逐個增加隱層神經元得到輸出,每增加一個神經元,已存在的輸出權值不會因此改變,只需要計算新增神經元與輸出層間的連接權重即可完成訓練,具體的網絡產生的迭代公式為:
L()=L-1()+LL(3)
式(3)中:L()為隱層神經元遞增到個時的網絡輸出;L為第個隱層神經元的輸出矩陣;L為連接第個隱層神經元與輸出層神經元的權值。
重復上述③④⑤,直至<或當前隱層神經元個數達到最大值后停止學習。如果一直比較大,這是由于輸入權值和閾值的隨機性造成的,此時網絡參數不當,應重新開始學習。
3.2 結構風險最小化極限學習機
4 小結
本文以通過耙頭泥水混合物密度耙吸式挖泥船在實際產量影響為切入點,考慮耙頭的角度、船舶航速、水流流速以及挖掘深度等相關影響因素構建模型。此模型可以通過重新學習的方式,讓操作員通過此模型預測不同情況下耙吸船的實際產量,基于此模型可以提前配置施工力量,合理規劃施工流程,改善施工工藝,在不同情況下找到施工中核心的控制要點,有效提高產能。
[1]邢家麗.基于粒子濾波的自航耙吸挖泥船溢流損失估計與控制[D].鎮江:江蘇科技大學,2012.
[2]王健,鐘志生,丁樹友.特大型耙吸挖泥船研制及工程應用[J].水運工程,2017(8):28-30.
[3]張燕.國內外大型耙吸挖泥船的關鍵技術發展研究分析[D].哈爾濱:哈爾濱工程大學,2010.
[4]蘇貞.自航耙吸挖泥船挖掘工況系統優化研究[D].鎮江:江蘇科技大學,2011.
[5]梁劍平.現代耙吸式挖泥船性能優化設計研究[J].中國水運,2017(10):35-36.
[6]Braaksma J. Model-based control of hopper dredgers[D].Delft:Delft University of Technology,2008.
[7]ROYAL IHC. Dredge smart,dredge efficient[J]. Dredging and Port Construction,2013(3):38.
[8]OSNABRUGGE J.Optimizing manpower and reducing fuel consumption while maintaining maximum dredging production[C]// Proceedings of WODCON XX World Dredging Conference,2013.
[9]陳虹.模型預測控制[M].北京:科學出版社,2013.
U616
A
10.15913/j.cnki.kjycx.2020.08.022
2095-6835(2020)08-0058-02
關放(1987—),男,本科學歷,助理工程師,中港疏浚有限公司市場部高級主管,主要從事投標、合同報價、施工預算等工作。王蔚(1986—),男,本科學歷,工程師,中港疏浚有限公司湛江分公司總經理,主要從事經營管理、造價管理、設備管理等工作。
〔編輯:張思楠〕
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
礦山安全信息(2022年40期)2022-04-07 02:16:52
當代水產(2021年10期)2021-12-05 16:31:48
建材發展導向(2021年9期)2021-07-16 07:11:36
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
今日農業(2020年20期)2020-11-26 06:09:10
數學物理學報(2020年2期)2020-06-02 11:29:24
聚氯乙烯(2018年9期)2018-02-18 01:11:34
光學精密工程(2016年6期)2016-11-07 09:07:19
中國房地產業(2016年2期)2016-03-01 01:25:48
