汽車內麥克風陣列布放位置優化方法研究*
2020-05-08 07:36:50郭慶王明杰徐翠鋒蘇海濤
科技與創新 2020年8期
郭慶,王明杰,徐翠鋒,蘇海濤
汽車內麥克風陣列布放位置優化方法研究*
郭慶,王明杰,徐翠鋒,蘇海濤
(桂林電子科技大學 電子工程與自動化學院,廣西 桂林 541004)
麥克風陣列在語音信號采集中被廣泛應用,其布放位置直接影響語音信號的采集質量,所以提出了一種汽車內麥克風陣列布放位置的仿真優化方法。首先建立汽車模型,設置模型內各部分的材料和屬性,然后在模型內放置聲源和麥克風陣列進行仿真。通過仿真,可以得到陣列上麥克風場點在聲源作用下的頻率響應,再通過運算得出聲源到麥克風場點的傳遞函數,最后利用不平坦度和平均幅值差對各麥克風場點的傳遞函數進行評價,分析汽車內麥克風陣列的最佳布放位置。
麥克風陣列;直接邊界元;位置優化;空間域信息
隨著汽車電子設備的發展,語音日漸成為汽車內人機交互的主要方式。對駕駛員語音信號的有效采集是語音信號處理的前提,它直接影響車載語音識別系統工作的準確性[1]。傳統的語音信號處理是利用單個麥克風進行數據采集,根據信號的時域、頻域信息對信號進行處理。隨著信號處理技術的進步,20世紀70年代陣列信號處理技術被應用到語音信號處理當中。麥克風陣列采集到的信號不僅包含時域和頻域信息,同時還增加了信號的空間域信息[2]。為了保證語音信號采集質量,需要對汽車內麥克風陣列的位置進行優化,所以本文提出了一種汽車內麥克風陣列布放位置的仿真優化方法,并利用仿真軟件進行驗證。
為了找到麥克風陣列在汽車內的最佳布放位置,本文利用LMS Virtual.Lab軟件進行仿真,在汽車模型內放置聲源和不同位置的麥克風陣列,其中麥克風陣列上包含5個等間距的麥克風場點。通過仿真可以得到麥克風場點在聲源作用下的聲壓頻率響應,經過換算得出聲源到麥克風場點的傳遞函數,然后利用不平坦度和平均幅值差對場點的傳遞函數進行評價,從而確定麥克風陣列在汽車內最佳的布放位置,為駕駛員語音信號的有效采集提供保障。
1 陣列位置優化理論分析
汽車內部為一個箱體,駕駛員語音會在汽車內部發生反射和衍射,通過多條路徑最終到達麥克風陣列,聲源到麥克風陣列的聲音傳播路徑如圖1所示,其中麥克風陣列上包含5個麥克風場點。
汽車內語音信號的傳播可以近似為線性時不變系統,在線性時不變系統中利用沖激響應來反映系統的性能。本文在仿真中利用單極子聲源作為系統的輸入,在聲源作用下麥克風場點的聲壓頻率響應作為系統的輸出響應[3],利用輸入和輸出響應得到聲源到麥克風場點的傳遞函數,其所近似的系統結構如圖2所示。
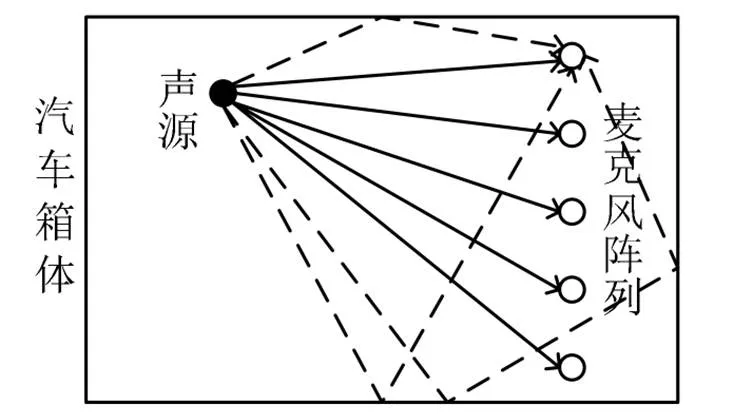
圖1 語音信號傳播路徑示意圖
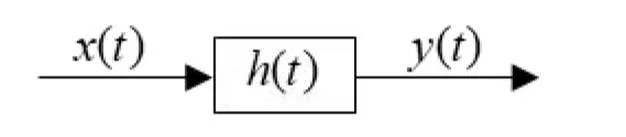
圖2 語音傳播系統結構圖
圖2中()為時域下單極子聲源信號,()為時域下麥克風場點的聲壓頻率響應,()為系統的傳遞函數。系統的輸出可以表達為:
()=()×() (1)
()=()() (2)
式(1)(2)中:(),(),()分別為(),(),()的頻域表示,從而可以得到系統的傳遞函數為:
()=()/() (3)
在線性時不變系統中可以通過分析系統沖激響應來評價系統的性能[4],所以,本文對聲源到麥克風場點的傳遞函數進行評價,分析麥克風場點位置的優劣,最終得出汽車內麥克風陣列的最佳布放位置。
2 汽車內麥克風陣列響應仿真及評價
2.1 汽車內麥克風場點響應仿真
利用Virtual.Lab中的聲學仿真模塊Virtual Lab acoustics進行仿真,因為汽車模型內部是一個封閉的模型,所以選擇聲學模塊下的直接邊界元法對聲學響應進行計算[5],仿真使用的汽車模型如圖3所示。
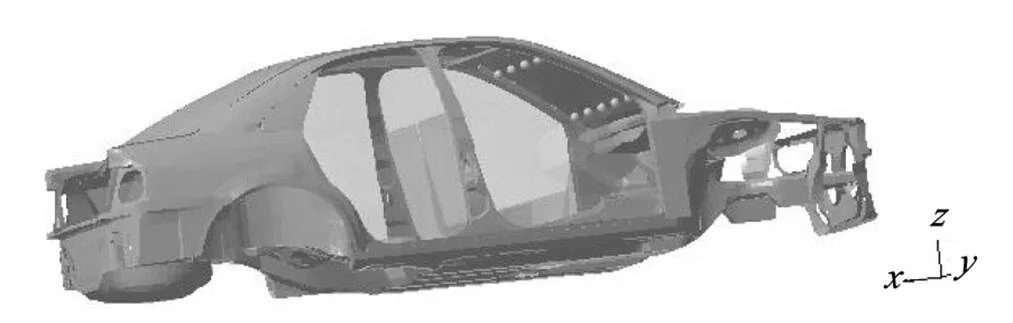
圖3 汽車模型圖
本文以駕駛員語音信號處理為例進行仿真,將單極子聲源放置在駕駛員頭部位置模擬駕駛員語音。汽車模型由多個部分組成,對模型內各部分進行分組,設置不同組的材料和吸聲屬性,使汽車模型內各部分對聲音的傳遞更切合實際。在汽車模型內放置麥克風陣列,麥克風陣列有多種拓撲結構,本文選擇均勻線性麥克風陣列進行仿真,陣列上包含5個間距為20 cm的麥克風場點。考慮到實際駕駛情況,麥克風陣列的布放位置主要有2個:駕駛員前方偏上的擋風玻璃最上端(麥克風陣列A)、駕駛員前方偏下的儀表盤位置(麥克風陣列B)。汽車模型內聲源和麥克風場點布放位置如圖4所示。通過仿真可以獲得麥克風場點在聲源作用下的聲壓頻率響應,從而可以得到聲源到麥克風場點的傳遞函數,通過對場點傳遞函數的評價分析麥克風陣列的最佳布放位置。

圖4 麥克風場點布放位置
2.2 評價方法
麥克風陣列所采語音信號要在不失真的情況下進行處理,這要求聲源到麥克風場點間的傳遞函數具有平坦的響應幅度,選擇不平坦度對麥克風場點的傳遞函數進行評價。因為人對聲音信號的相位不敏感,所以本文不評價傳遞函數的相位。這里利用信號的方差反應信號的不平坦度,其數值越小表示場點的傳遞函數越平坦,則不平坦度為:
式(4)中:為麥克風場點傳遞函數的不平坦度;為場點傳遞函數上各頻點的幅值;為場點傳遞函數上所有頻點幅值的平均值;為場點傳遞函數的頻點數。
在聲源作用下,麥克風陣列所采信號的幅值越大說明信號的衰減程度越小,越有利于語音信號的處理,所以本文利用平均幅值差對麥克風場點的傳遞函數進行評價。平均幅值差可以有效反應兩個對應麥克風場點的傳遞函數在單個頻率點上的平均幅值差距,其計算公式為:

式(5)中:max為場點傳遞函數的最高頻率;△為麥克風場點傳遞函數的頻率步長,20 Hz;iy為麥克風陣列A上第個麥克風場點在頻率為時的傳遞函數幅值;iy為麥克風列陣B上第個麥克風場點在頻率為時的傳遞函數幅值。
3 仿真數據分析
通過仿真,可以獲得麥克風場點在聲源作用下的響應信號,然后利用式(3)得到聲源到麥克風場點的傳遞函數。利用不平坦度和平均幅值差對各場點的傳遞函數進行評價,對比麥克風場點對聲源信號采集的性能,確定汽車內麥克風陣列的最佳布放位置。
數字電話機的國際通信標準是300~3 400 Hz,但是實際人聲頻率最低可達20 Hz[6],且人講話的頻率主要集中在20~1 200 Hz,所以本文討論的語音頻率范圍有20~3 400 Hz、20~1 200 Hz。本文在對比分析麥克風場點的傳遞函數時,利用汽車模型中不同陣列相對應的場點進行比對(圖4中標號為A1和B1的場點為一組進行對比,標號為A2和B2的場點為一組進行對比,標號為A3和B3的場點為一組,標號為A4和B4的場點為一組,標號為A5和B5的場點為一組進行對比)。
3.1 頻帶為20~3 400 Hz麥克風場點的傳遞函數分析
當頻帶為20~3 400 Hz時,對應麥克風場點的傳遞函數對比曲線如圖5所示(圖例為麥克風場點標號)。計算麥克風陣列上場點傳遞函數曲線的不平坦度和平均幅值差,計算結果如表1所示。
從圖5和表1中可以發現,麥克風陣列A的5個場點的傳遞函數曲線平坦度較優。麥克風陣列A上標號為A1、A2、A3、A4的麥克風場點傳遞函數幅值小于同組的麥克風陣列B上場點的傳遞函數幅值(平均幅值差為負數),麥克風陣列A上標號為A5的場點傳遞函數幅值大于同組的麥克風陣列B上場點的傳遞函數幅值(平均幅值差為正數),同時兩個麥克風陣列平均幅值差數值很小,其平均幅值相近。

圖5 20 Hz~3 400 Hz場點的傳遞函數應曲線
表1 20~3 400 Hz場點傳遞函數的評價參數值
對比組場點標號不平坦度平均幅值差 第一組A10.045 1﹣0.001 B10.068 3 第二組A20.0312﹣0.039 9 B20.052 1 第三組A30.024 3﹣0.003 4 B30.031 2 第四組A40.020 7﹣0.024 5 B40.053 4 第五組A50.038 30.004 8 B50.070 5
3.2 頻帶為20~1 200 Hz麥克風場點的傳遞函數分析
人在交流的時候語音頻率主要集中在20~1 200 Hz,各麥克風場點在20~1200 Hz頻段內的傳遞函數曲線如圖6 所示。對應20~1 200 Hz頻帶內各場點的傳遞函數曲線的不平坦度和平均幅值差如表2所示。
從圖6和表2中可以發現麥克風陣列A的場點傳遞函數曲線的不平坦度數值較小,說明麥克風陣列A的場點傳遞函數比麥克風陣列B的場點傳遞函數更平坦。幅值方面,麥克風陣列A上標號為A1、A3和A5場點的傳遞函數幅值大于同組的麥克風陣列B上場點的傳遞函數幅值,標號為A2和A4場點的傳遞函數幅值小于同組的麥克風陣列B上場點的傳遞函數幅值。
4 結論
本文提出了一種汽車內麥克風陣列布放位置的仿真優化方法,通過對麥克風陣列布放位置的優化,實現對聲源信號的有效采集,為后面語音信號的處理提供有力的支撐。以駕駛員語音的采集為例進行仿真,分析麥克風陣列的最佳布放位置,通過對兩種頻帶下麥克風場點傳遞函數的評價,得出如下結論:在各頻帶下麥克風場點的傳遞函數具有類似的規律,從平坦度的角度看,麥克風陣列A的場點傳遞函數優于麥克風陣列B的場點傳遞函數。從幅值的角度看,麥克風陣列A上有的場點傳遞函數幅值大于同組的麥克風陣列B上場點的傳遞函數幅值,有的則小于同組的麥克風陣列B上場點的傳遞函數幅值,且整體上兩個麥克風陣列的平均幅值相近。綜合考慮評價結果,麥克風陣列應該安裝在汽車內前擋風玻璃的最上端,即麥克風陣列A的位置,該位置更有利于采集駕駛員語音信號。

圖6 20 Hz~1 200 Hz場點的傳遞函數曲線
表2 20~1 200 Hz場點傳遞函數的評價參數值
對比組場點標號不平坦度平均幅值差 第一組A10.084 80.008 7 B10.154 3 第二組A20.062 9﹣0.041 6 B20.117 3 第三組A30.055 10.000 3 B30.071 7 第四組A40.040 8﹣0.081 B40.118 1 第五組A50.0640.015 6 B50.161 7
[1]李政儀,宮二玲,曹孟華.圓形平面麥克風陣列構型的優化設計方法[J].傳感器與微系統,2019,38(10):15-17,24.
[2]陸振宇,何玨杉,趙為漢.關于多通道語音去噪的識別優化研究[J].計算機仿真,2016,33(6):315-320.
[3]潘立登,潘仰東.系統辨識與建模[M].北京:化學工業出版社,2004.
[4]WANG Q G,GUO X,ZHANG Y.Direct identification of continuous time delay systems from step responses[J].Process Control,2001(11):531-540.
[5]劉昕洋.基于LMS Virtual.Lab的窗體及墻體聲學特性分析[D].南昌:南昌航空大學,2016.
TN641
A
10.15913/j.cnki.kjycx.2020.08.012
2095-6835(2020)08-0033-03
廣西科技基地和人才專項“電動揚聲器異音智能檢測與自動分類系統開發”(編號:桂科AD19110026);廣西自然科學基金青年基金“基于聽覺感知改善汽車內聲品質的主動控制算法研究”(編號:2016GXNSFBA380117)
郭慶(1962—),男,陜西武功人,學士,教授,主要研究方向為嵌入式測控系統、微信號檢測技術、虛擬儀器。
〔編輯:張思楠〕
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車與安全(2019年9期)2019-11-22 09:48:03
中國生殖健康(2019年3期)2019-02-01 06:12:26
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
決策探索(2014年21期)2014-11-25 12:29:50
環球時報(2010-02-11)2010-02-11 13:34:15
