淺談供水設備機械電氣自動化人工智能控制技術
2020-05-06 03:36:34張振友
中國新技術新產品 2020年5期
張振友
(山東東明石化集團有限公司,山東 菏澤 274500)
1 人工智能控制器算法
1.1 PID算法原理
PID 即 Proportional(比例作用)、Integral(積分作用)、Differential(微分作用)的縮寫。PID 算法是控制領域應用最廣泛的算法,對ID 算法原理圖進行分析(如圖1 所示),如果要調節供水設備的溫度,那么首先需要設置一個輸入目標,通過比例調節、積分調節、微分調節3 個步驟,對水體的溫度進行控制,通過執行機構使得水溫達到我們事先設計的值,該過程是通過測量元件進行控制的。PID 算法的功能在于其能夠使水溫迅速升高(通過比例、積分和微分的算法調節),并且將溫度穩定在一個固定的值。
1.2 PID算法在人工智能控制器中的應用
在PID 算法的實際應用過程中,必須要考慮實際的散熱問題,因為不同的材質有不同的散熱效率,有的散熱效率高,有的散熱效率低[1]。另外,在加熱到固定的溫度,如30 ℃以后,水的余溫、加熱管道的余溫也會讓水再次升溫,因此,并不能使水溫達到一個穩定值,所以為了生產需要,就必須設置一個誤差比例值p,并且每次按照最開始設置的Kp(比例系數)進行誤差調整,從而達到水溫穩定在30 ℃的效果。
例如,供水設備水溫需要穩定在30 ℃,初始水溫是10 ℃,將誤差溫度預設為1 ℃,那么,第一次的誤差是30-10 =20(℃),需要升高的溫度是Kp×20 =20(℃)。第二次的誤差是30-20 =10(℃),需要升高的溫度是Kp×10 =10(℃),以此類推。按照這一步驟進行操作,將會得到一條更加準確的測溫曲線,但是這條測溫曲線不是突然上漲,而是有一定的上升過程。
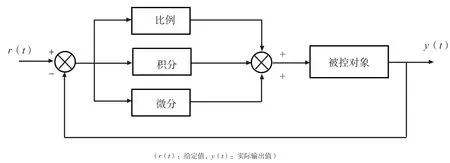
圖1 PID 算法原理
1.3 基于PID算法對非線性過程進行控制
一般人工神經網絡的算法很難保證其收斂性,因此,一般會使用非線性函數近似器。非線性函數近似器不需要確定研究對象的模型,就能對個別的研究對象建立模型并進行研究分析。PID 算法在遇到特殊問題,比如供水設備機械控制時,需要再次建立模型進行函數估算,不僅效率不高,而且也會影響系統的穩定性。因此,我們在設計人工智能控制器時,一般是在PID 算法的基礎上進行改良,再對設備進行控制,原因是PID 算法很難控制算法的誤差。
例如,按照PID 算法,輸出=P +I +D,如果減少I,靜誤差就很難消除,但是通過對該技術進行改良,采取一種非線性的計算方式進行計算,提升了算法的準確性。具體計算如下:輸出=P +I +D +∫I,(∫I:微分積分作用),考慮到參數之間互相影響,所以確定比例作用K1=I/t,微分作用K2=(I-I/t)D,(t:設定變化量),所以輸出公式變為:輸出=P(K1+K2)+(I/M)∫(K1+K2),(M:子系統模型數值,∫(K1+K2):比例作用與微分作用的積分范圍),與最優PID 控制器進行對比分析,非線性函數近似器的上升時間是最優PID 控制器的1.5 倍,下降時間是最優PID 控制器的3.5 倍。非線性函數近似器的應用使得人工智能控制器可以解決一些常規方法難以解決的問題,并且具有很好的抗噪聲干擾能力,對新技術和新數據的適應性較好,即使是機械配置較低,也能通過修改和擴展人工智能控制器來實現智能化控制[2]。
2 PID技術在恒壓供水控制器中的應用
恒壓供水AI 人工智能調節器的工作原理就是在水壓一定的基礎上,通過人工智能技術對供水系統進行控制和協同,實現用戶用水的自動化管理,并且可以節省資源,實現效益的最大化[3]。對于壓強的控制和對于溫度的控制相同,因為存在時滯,所以系統的響應階段會存在一定的振蕩,動態性不高。因此,一般采用改進PID 技術和人工智能調節器進行模糊控制,如圖2 所示。
控制開始過程,e=Y-s,|e|≥EM,誤差較大,當誤差逐漸變小,直到|e|<EM時,變換控制對象,采用改進PID 算法,并消除積分飽和問題,達到最佳靜態性系統值,就是輸出量盡可能不失真的反映輸入量。其中,s:給定值、e:誤差、Y:輸出,EM:設定值。
3 恒壓供水AI人工智能調節器
3.1 系統組成
該系統由上位機組軟件RSView32、壓力傳送設備、控制接觸器組、AB 軟啟動設備、變頻器、AI-808 人工智能調節器、閥門、水泵(380 V 低壓電機,分別有355 kW 設備2臺、220 kW 設備2 臺、160 kW 設備1 臺)等組成。
3.2 設備功能
電氣自動化使工業流程向著自動化方向發展,人工智能技術可以實時監控電氣設備的數據值,智能捕捉故障錄波。大大提升了電氣設備工作的安全性和穩定性,該文以恒壓供水AI 人工智能調節器為例對其進行分析,恒壓供水AI-808人工智能調節器的設備具體功能見表1。
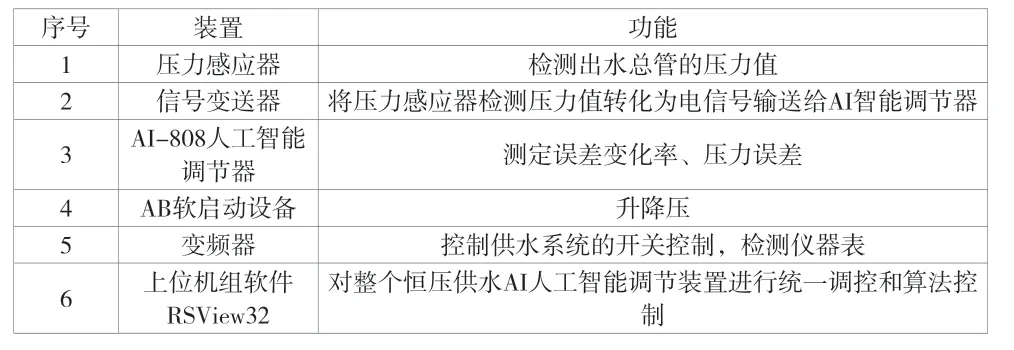
表1 恒壓供水AI 人工智能調節器設備功能
3.3 AI-808人工智能調節器工作原理
AI-808 人工智能調節器采用最新的人工智能技術,以數字校正系統為輸入系統,采用改進PID 智能調節算法實現精準穩定控制,適用于各種場合。壓力感應器將信息傳導給AI-808 人工智能調節器,調節器自動與設定值進行比較并計算壓力誤差。結合PID 控制算法,將控制信號為4 mA ~20 mA的電流傳導到變頻系統的控制端,并根據水管要求對水流頻率進行調節。如果用戶的用水量增加,水泵的工作頻率上升到一定值(一般為50 Hz)以后,如果還達不到一定的供水水壓,就換水泵供水,如果用水量降低,則會自動停止某一或某幾臺水泵運行,這樣就能實現小范圍的自動化控制。
3.3.1 AI-808人工智能調節器技術規格
AI-808 人工智能調節器具體的技術規格見表2。
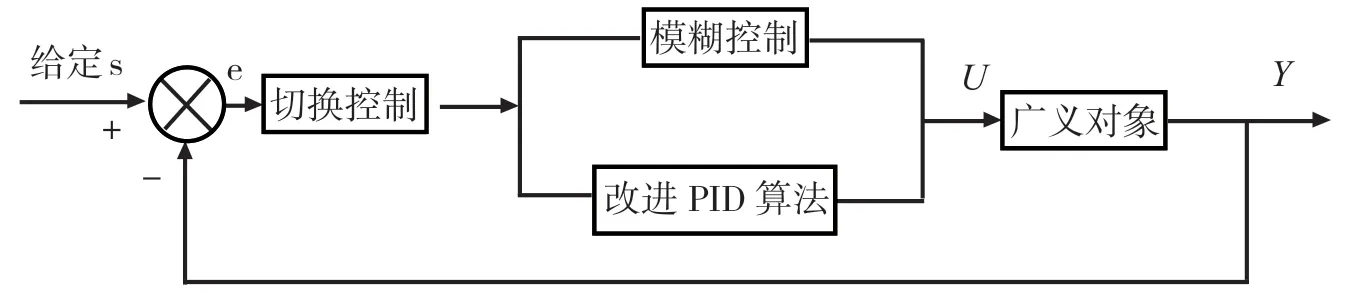
圖2 改進PID 算法框圖
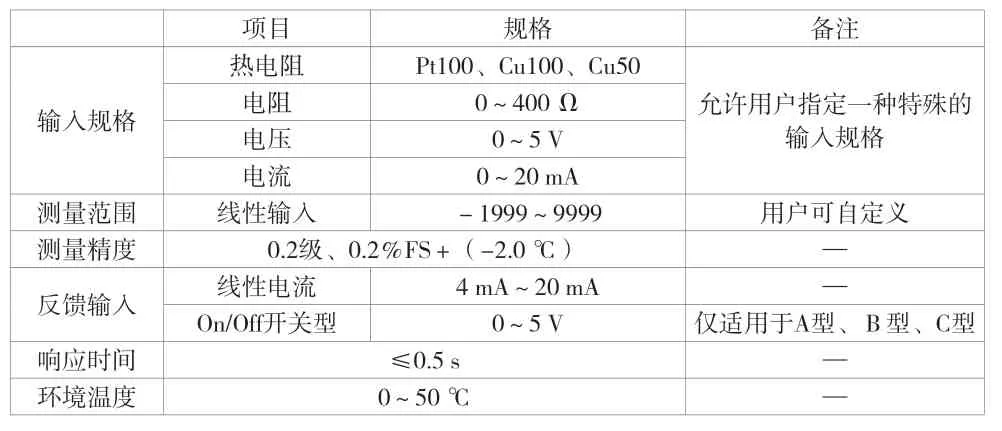
表2 AI-808 人工智能調節器的技術規格
3.3.2 AI-808人工智能調節器人工控制說明
AI-808 人工智能調節器的調節儀表具有一定的自整定功能,并且無需用戶超調,自整定時儀表盤的執行位式經過2 ~3 次振蕩,機器計算出P、I 和dt(采樣時間)參數,在一些特殊場合課將I 增加或減少50%,如果效果變好就繼續向同方向調節,反之則向反方向調節。對系統響應曲線進行分析,如果振蕩周期略長,則優先減少P,加大I 和dt,反之則優先加大I,加大P 和dt。如此一來就可以對復雜的對象進行良好的控制,工作人員只需要調整設備的實際參數即可。
3.4 水泵控制臺工作原理
控制臺有手動和自動2 種模式,在手動模式下,通過對多圈電位器進行調節,單獨開啟或關閉某一或某幾個水泵,如果某一水泵需要維修,就可以采取這一模式退出運行序列。自動模式下需要工作人員使用開關控制運行的水泵。如果供水量上升,則通過壓力感應開關增加水泵的運行數量,但是如果用戶的需水量降低,則自動減少水泵的運行數量。
4 結語
總而言之,人工智能技術已經逐漸在城鄉智能供水控制系統中得到廣泛應用,其能有效改進傳統的控制系統控制效率不高的問題。恒壓供水系統是人工智能系統在供水中比較簡單的應用,并且實踐證明,普通的PID 算法不能滿足水泵的壓力控制需求,因此,在PID 算法的基礎上進行改進,進行非線性模糊化控制,能有效提升工作效率,節省人力、物力,具有很高的實踐應用價值。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
西安航空學院學報(2022年2期)2022-07-04 07:45:42
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
商界(2019年12期)2019-01-03 06:59:05
IT經理世界(2018年20期)2018-10-24 02:38:24
電子制作(2018年11期)2018-08-04 03:26:08
小康(2017年16期)2017-06-07 09:00:59
南風窗(2016年19期)2016-09-21 16:51:29
南風窗(2016年19期)2016-09-21 04:56:22
工業設計(2016年12期)2016-04-16 02:52:00
