一種具備爬樓功能的路空兩用無人機的設計
2020-04-30 03:19:56羅漢杰施嘉濠伍增渲
湖北農機化 2020年3期
羅漢杰 倪 虹 施嘉濠 伍增渲
(杭州師范大學錢江學院,浙江 杭州 310018)
0 引言
旋翼飛行器隸屬于無人機技術領域的一個分支,也被稱為無人駕駛飛機(簡稱UAV)。隨著中國制造2025和互聯網+,飛行器技術發展越來越成熟。其中旋翼飛行器制作成本低,安全性能高,不僅應用于軍事上的偵察機和無人靶機,還被應用于民用方面。
在如今的市場上,傳統的多旋翼飛行器大部分采用固定槳距的螺旋槳,通過調整電機的PWM波控制螺旋的轉向和轉速,產生相互抵消的反槳扭矩來控制飛行器的各種姿態。其中的路空兩用無人機功能相比較而言更多,但傳統的路空兩用無人機大多數為簡單的輪動功能加上飛行功能,功能單一,并且變形之間轉換機構過于復雜難以適用于多種場合,只有簡單的物流運輸、空中拍攝、播種等。特別是面對地形復雜多變的環境中無法正常使用,不夠穩定,局限性也大,不能應用于多種場合。
1 路空兩用無人機結構設計概念總布局
一種具備爬樓功能的旋翼飛行器是基于arduino2560微型控制板,搭接樹莓派利用Opencv進行圖像處理以及多種傳感器組合而成。該旋翼飛行器具備輪動功能、爬樓功能和飛行功能。特點在于該旋翼飛行器輪動過程具備全向輪功能,即輪動方向360°全方位可調并且輪動過程中具備2種狀態:一個是對稱的四輪平動狀態。另一個是六輪爬樓狀態,并且該旋翼飛行器具備的爬樓功能,且爬樓過程中,6個車輪的間距可以根據樓梯高度及間距調整,可適應不同類型樓梯同時旋翼飛行器的槳距長度、槳距角度和螺旋槳位置均可360°無死角的調節,有利于通過槳距調節增強穩定性,增加狹小涵道通過性和空曠地帶抗風能力,同時該旋翼飛行器具備的折疊功能,具有便攜性并且結構精煉,整體重量較小。
2 路空飛兩用無人機結構設計組成
該路空兩用無人機結構,包括機體、變形支臂、控制器和無線模塊。機體包括中心電機、機架、主齒輪、副齒輪和變向齒輪,主要功能是為飛行器提供驅動力和路空的切換作用。變形支臂則是包括第一關節架、第二關節架、第一變形驅動組件、第三關節架、第二變形驅動組件、鎖止組件和行進動力組件,主要功能用與飛行器的各種模式切換作用,根據收集到的數據進行模式的切換來到達使用要求。
3 路空兩用無人機的各種模式設計及運行方式
3.1 飛行模式的運行方式
在飛行模式下如圖1,路空飛行器基本姿態為X模式:通過arduino2560的微控制板控制8個無刷電機的轉速,達到飛行器在飛行模式下的8種狀態,分別為垂直上升狀態、垂直下降狀態、向前狀態、向后狀態、向左狀態、向右狀態、順時針改航向狀態、順時針改航向狀態。如圖2為8種狀態的運行方法:當旋翼飛行器穩定后,A、B、C、D 4個電機同時加速時為垂直上升狀態,同時減速時為垂直下降狀態;當A、B減速,C、D加速則為向前狀態;當A、B加速,C、D減速則為向后狀態;當A、D減速,B、C加速則為向左狀態;當A、D加速,B、C減速則為向右狀態;當A、C減速,B、D加速則為順時針改航向狀態;當A、C加速,B、D減速則為順時針改航向狀態;優點在于利用8個動力電機轉動得到更大的升力,更加容易使得飛行器起飛,達到飛行模式的8種狀態。并且通過Opencv所傳輸的信息處理變形為其他模式。如當路空兩用的旋翼飛行器在空中需要穿過一個通道(例如樹枝與樹枝之間的間隙)時,陸空兩用的旋翼飛行器進行飛行折疊,(折疊模式如圖3),以避免在穿過時發生碰撞。
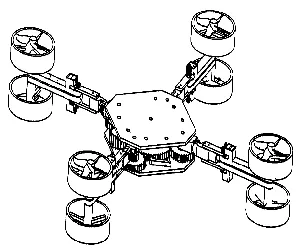
圖1 飛行模式
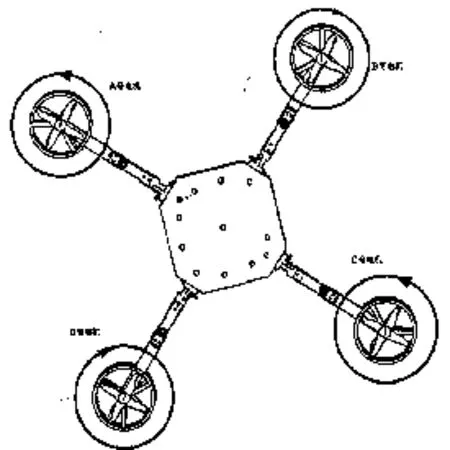
圖2 8種狀態的運行方法
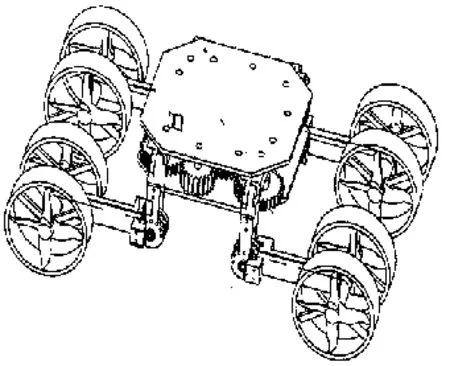
圖3 折疊模式
3.2 行走模式的運行發送
當飛行模式通過Opencv所發出的信號,需變形為行走模式時,如圖4所示,通過中心電機轉動,驅動各個變形支臂同步轉動,并且向下翻轉,使得兩用螺旋槳處于垂直于行進方向。此時8個兩用螺旋槳均與地面接觸,電機轉動即可驅動機架在地面上行進,實現路空兩用的功能。并且可通過PWM對電機的轉速控制,來控制行走模式時飛行器的速度,可適應于更多的場合下。
3.3 爬樓模式
當行走模式時面對地形復雜多變的環境中無法正常使用,通過Opencv發出的數據,變形為爬樓模式,如圖5所示,前變形支臂分為2根支架各自成θ角,60°≤θ≤90°,使得兩支臂上均形成能夠自由擺動的V形輪架。后變形支臂的2根一側轉動,使得左后支臂及右后支臂內的第三支架與豎直方向呈0.5θ角;此時該地空兩用的旋翼飛行器呈現六輪狀態,且位于前左右2組車輪分別位于2個能夠自由擺動的V形支架上;當V形支架上的一個車輪抵住臺階并轉動時,將沿臺階向上滾動(向上滾動的過程中V形支架發生轉動)。因此,爬樓模式的地空兩用的旋翼飛行器能夠沿著臺階向上行駛,適應于各種地形復雜多變的環境。
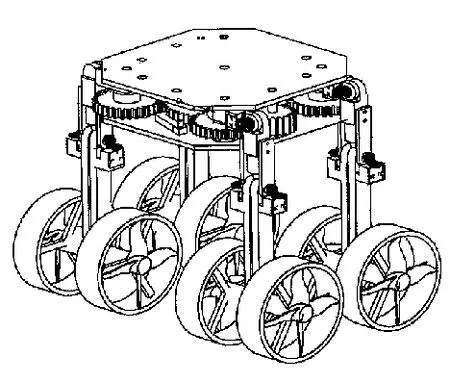
圖4 行走模式
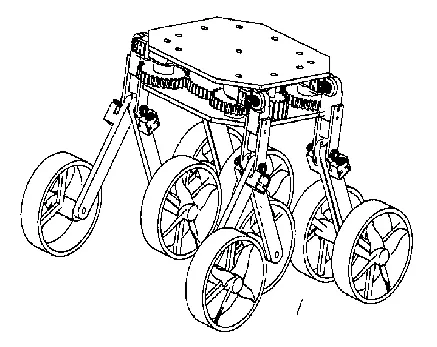
圖5 爬樓模式
4 路空兩用無人機硬件設計
路空兩用無人機可通過變形驅動組達到各種模式的變形。該旋翼飛行器的控制主要在幾種的模式變形中,通過Opencv傳輸的信號,面對各種不同的環境中實現飛行器不同的功能變換。其該旋翼飛行器控制包括飛行模式、行走模式、爬樓模式之間變形。所需硬件如圖6。
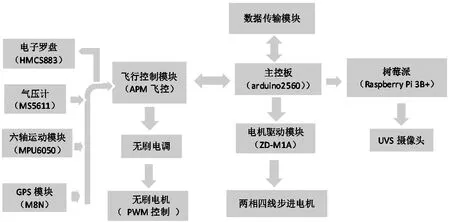
圖6 硬件框架
4.1 飛行控制模塊
路空兩用無人機的飛行控制模塊選用APM飛控,該飛控模塊為兩級PID控制,其中一級為導航,另一級為控制。APM飛控是由微型處理器以及傳感器組合而成。當處于飛行模式時,遇到突發情況,外界干擾等一些原因導致兩用飛行器處于不平衡狀態時,飛行器是無法飛行的,這是APM飛控微處理器通過各傳感器實時發出的信號,進行采集,運算,采用慣導算法計算出姿態角,通過PID計算,發出PWM信號,控制各無刷電機轉速,到達飛行模式的8種狀態。圖7為APM飛控原理圖。
4.2 電機驅動模塊
兩用無人機的電機驅動模塊使用的是ZD-M1A步進驅動器(如圖8),工作原理在時序通電時,通過脈沖信號來控制步進電機的轉速以及加速度,收到一個脈沖轉動一個角位移,通過脈沖個數及頻率控制。當Opencv發出信號,通過APM飛控計算出的姿態角度,控制步進電機的轉速,完成不同的模式以及相應的功能。該驅動器不需外部設備加以供電,重量輕,方便使用。ZD-M1A步進電機驅動器的接線圖如圖9。
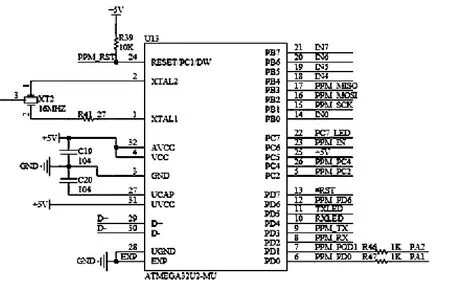
圖7 飛控原理圖
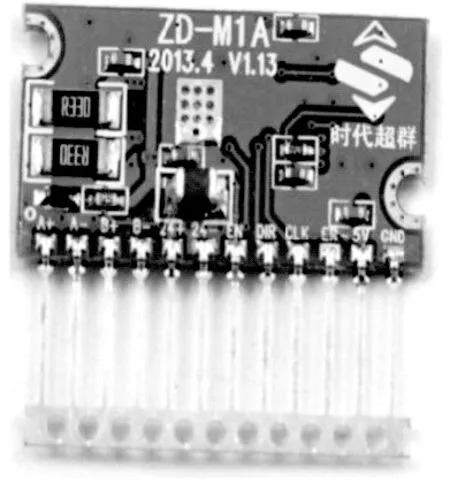
圖8 ZD-MIA步進電機驅動模塊
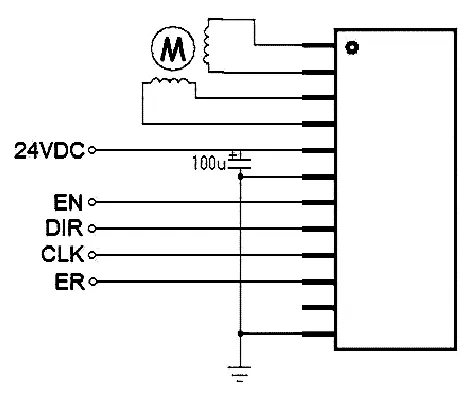
圖9 ZD-MIA步進電機驅動器接線圖
4.3 通信系統
路空兩用無人機在通信方面主要在于arduino 2560與樹莓派Raspberry Pi 3B+之間的通信,通過Opencv進行圖像識別判斷無人機的行進模式,通過Opencv發出的通信信號(波特率一般為9600),等待主控板arduino 2560進行接收,接收到的信號通過PWM信號來控制各電機的運轉,到達相應模式、相應狀態和相應功能。
5 路空兩用無人機的展望
一種具有爬樓功能路空兩用無人機以arduino2560微型控制板為主控制板,通過與樹莓派進行通信,利用Opencv進行圖像識別發出信號控制各模塊變形各種模式。其最大的特點是爬樓功能,可在復雜多變的地形上應用,無論是凹坑還是凸起都可實現陸地變形功能,并且在遇到樓梯時,四輪切換為六輪爬樓姿態,并且具有全向輪的功能360°無死角的爬樓,無需過多的角度控制即可爬樓,易控制,有利于通過槳距調節增強穩定性,也可以根據樓梯的高度進行變換,兩變形支臂可切換相應的角度θ,目前可轉動的角度只能在60°≤θ≤90°,只能針對社區居民樓的樓梯高度進行切換,還未實現對于所有樓梯的爬樓功能,缺少對變形支臂的長度無法根據不同的樓梯高度切換,需往后通過機械結構的設計實現來完善爬樓功能。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
中華詩詞(2020年1期)2020-09-21 09:24:52
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中國科技論壇(2017年7期)2017-07-25 08:49:53
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
