全自動運行信號系統與 洗車機接口分析研究
2020-04-28 12:26:13羅斌龍趙曉峰孫思南邱鵬
現代城市軌道交通 2020年4期
羅斌龍 趙曉峰 孫思南 邱鵬
摘 要:全自動運行系統自動洗車功能的實現,依托于信號系統與洗車機之間的接口配合。在全面分析洗車機類型的基礎上,針對移動式洗車方式進行詳細接口設計與分析,描述自動端洗和自動非端洗模式下的清洗場景,同時考慮手動洗車模式和降級洗車模式,從而提出一套完整可行的接口技術方案。
關鍵詞:城市軌道交通;全自動運行;信號系統;自動洗車;接口分析
中圖分類號:U284.48
全自動運行系統是基于現代計算機、通信、控制和系統集成等技術,實現列車運行全過程自動化的新一代城市軌道交通控制系統,包括信號、車輛、綜合監控、通信、站臺門、洗車機等系統。
隨著全自動運行信號系統的不斷部署和實施,作為必備功能的自動洗車,值得進行深入分析和研究,特別是整個自動化列車清洗過程所依賴的信號系統和洗車機之間的配合接口。
1 自動洗車需求
城市軌道交通全自動運行系統的列車清洗作業,按照洗車方式可分為2類:固定式洗車和移動式洗車。固定式洗車是指在清洗過程中,列車停在固定位置,洗車機自動完成兩端和側面的清洗;整個洗車線只有1個停車位,洗車機需要配置整列車長度的側面清洗設備。移動式洗車是指在清洗過程中,列車需要先后停在2個不同的停車位,側面清洗需要通過列車緩慢移動來完成。相比固定式洗車,移動式洗車的洗車線長,多1列車加端洗設備長度的距離,但是側面清洗設備少,排水設施的布置也更加簡潔。
在人工車輛段中,洗車線通常采取移動式洗車。在全自動運行系統中,移動式洗車依然是主流方式,固定式洗車通常只在場地受限的車輛段有所應用。
在全自動運行系統中,分為正常情況下洗車和非正常情況下洗車2種。
(1)正常情況下,系統應根據洗車計劃進行洗車作業提示,人工確認后應自動觸發至洗車線的進路。信號系統與洗車機、車輛進行信息交互,控制車輛恒速運行完成自動洗車。洗車完畢后,系統根據洗車計劃自動觸發回到指定列檢庫的回庫進路。
(2)非正常情況下,主要是指列車在洗車過程中發生故障,如車地通信故障、洗車機故障等,則應退出自動洗車工況,轉而使用人工模式駕駛列車完成洗車作業。由于目前洗車機工藝設備可靠性有限,全自動運行系統中進行自動洗車時,往往要求洗車線控制臺和待洗列車上都有人值守監護。
下面針對全自動運行系統中常用的移動式洗車,結合蕪湖市軌道交通1號、2號線一期全自動運行項目,進行自動洗車的運營場景和詳細接口分析。
2 洗車運營場景分析
按照洗車機的控制方式進行劃分,洗車運營場景包括自動洗車模式、手動模式和發生故障時的降級模式。
2.1 自動洗車模式
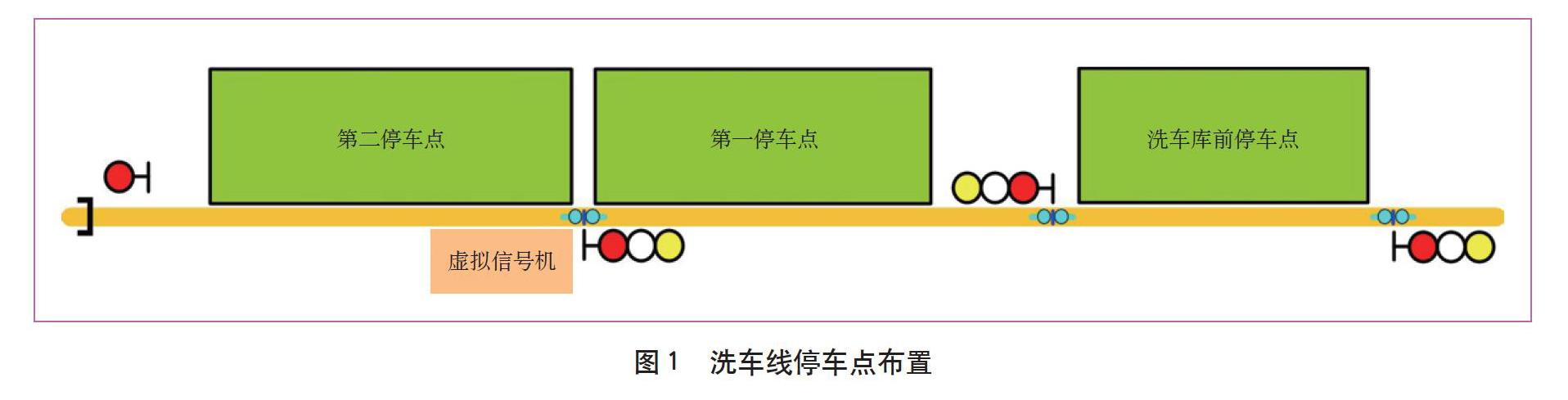
在洗車機自動控制洗車模式下,包括自動端洗和自動非端洗2種模式:端洗是清洗列車兩側和頭尾兩端,洗車作業過程需要停車2次;非端洗只清洗列車兩側,洗車作業過程只需要停車1次。采用移動式洗車的步驟場景需要結合具體的站場圖設備布置,如圖1所示,下面分別介紹這2種自動洗車模式的洗車場景。
2.1.1 自動端洗模式
列車在洗車庫前停車點停穩后,信號系統接收到“洗車機狀態正常”,并將“洗車請求”發送給洗車機,洗車機的洗車模式是端洗模式且處于洗車自動控制模式。洗車機響應信號系統發出的“洗車請求”,回復“洗車機就緒”給信號系統,并將“洗車機就緒”保持在高電平,直到每一列車的清洗過程完成為止。信號系統收到“洗車機就緒”后,列車進入洗車機,“洗車請求”變為低電平。列車自動監控系統(ATS)將根據時刻表觸發進路。
在信號系統接收到“洗車機就緒”后,信號系統將根據從洗車機處獲取的預先配置的速度值作為臨時限速,可配置的值應符合洗車機的規范要求。在洗車機區域的列車運行速度值,即列車自動運行(ATO)限速,要求為4~5km/h,因此信號系統將運用7~8km/h的臨時限速,即列車自動防護(ATP)限速。
當列車開始進入洗車機區域且被洗車機檢測到,洗車機開始工作,同時發送“洗車進行中”狀態給信號系統。
列車進入洗車機后,在全自動運行模式(FAM)下信號系統控制列車在每一個設定的停車點停車。洗車機系統需要確定列車停準在正確的位置上。因此,僅當洗車機檢測到列車停準在正確的位置上時,洗車機發送“零速請求”給信號系統,信號系統需要響應洗車機的請求在洗車機區域施加零速限制,同時發送“零速施加”狀態信息給洗車機。
當收到保證列車不會移動的“零速施加”狀態信息后,洗車機啟動洗車程序。洗車機清洗列車的頭部,當清洗完成且洗車機刷頭移開后,洗車機移除發送給信號的“零速請求”。
當信號系統收到“零速請求”移除后,信號系統移除“零速施加”,移除洗車機區域的零速限制,同時恢復洗車機區域的臨時限速。
在洗車機完成列車頭部的清洗后,信號系統控制列車移動至第二停車點停車,并且停準在規定的位置(尾端清洗位置),僅當洗車機檢測到列車停準在正確的位置上時,洗車機發送“零速請求”給信號系統,信號系統需要響應洗車機的請求在洗車機區域施加零速限制,同時發送“零速施加”狀態信息給洗車機。
當洗車機收到“零速施加”狀態信息,洗車機清洗列車的尾端。當清洗完成后,洗車機的刷頭移開,洗車機移除發送給信號的“零速請求”命令,當信號系統收到“零速請求”移除后,信號系統設置返回洗車機入口方向的進路。
在列車清洗完成后,洗車機移除發送給信號系統的“洗車進行中”,信號系統移除臨時限速。
2.1.2 自動非端洗模式
由于自動非端洗模式的洗車作業的大部分過程與自動端洗模式類似,主要區別在于清洗范圍和停車次數不同,所以僅結合作業順序進行說明。
列車停穩在洗車庫前停車點后,信號系統和洗車機的接口交互過程與自動端洗模式相同,洗車時列車限速和實際運行速度也與自動端洗模式相同。
當列車進入洗車機后,與自動端洗模式不同,自動非端洗模式下不清洗車頭和車尾,所以信號系統直接控制列車以低速運行到第二停車點停車。信號系統將設置返回洗車機入口方向的進路。
在列車清洗完成后,洗車機移除發送給信號系統的“洗車進行中”,信號系統移除臨時限速。
2.2 手動洗車模式
在手動洗車模式下,洗車機由洗車人員手動控制,不需要任何信號系統提供的信息。信號系統不會收到任何洗車機的信息。FAM模式列車不能進入洗車線。
手動洗車模式的提出取決于洗車機,具體過程如下:
(1)洗車機發送“洗車方式”為手動方式;
(2)洗車機操作員手動操作洗車機;
(3)場調手動排列至終端信號機的調車進路;
(4)司機切換列車至列車自動防護模式(CM)/非限制人工駕駛模式(EUM),按信號顯示移動,按場調命令依靠停車牌在第一或第二停車點停車。
(5)進路解鎖,場調手動排列出洗車線的調車進路。
(6)洗車機操作員手動關閉洗車機。
2.3 降級洗車模式
每個相關信號子系統為每個洗車步驟設置一個可配置的超時時間。如果在一定時間內下一步驟沒有被執行,則系統會產生1個報警信息。
在洗車機故障時,洗車機故障和零速請求將發送至信號系統。在這2種情況下,報警信息將發送至ATS操作員。為簡化降級場景,信號系統會提供給場調1個單獨的復位命令。該命令將信號和洗車機都重置到初始狀態,ATS操作員手動設置1條進路將列車從洗車機中拉出。
需要注意該復位命令在洗車進程故障時使用,但是如果設備發生故障,故障可能仍然存在,場調應通知工程師來處理該故障。
3 自動洗車接口設計
3.1 全自動運行信號系統與洗車機接口結構與設計
全自動運行信號系統與自動洗車功能相關的部分主要是軌旁設備,包括區域列車自動運行(Region Automatic Train Operation,RATO)設備、計算機聯鎖(Computer Based Interlocking, CBI)設備、目標控制器(Object Controller System,OCS),及接口繼電器/可編程邏輯控制器(Programmable Logic Controller,PLC)。
RATO主要處理軌旁非安全控制功能,同時負責與ATS、RATP的通信。CBI是處理進路控制功能的安全關鍵設備,軌旁外圍設備信息均通過OCS與其接口。OCS是全電子化聯鎖的安全關鍵輸入/輸出設備,負責與軌旁外圍設備直接接口。繼電器/PLC用于處理軌旁外圍設備的非安全信息,一方面繼電器和外圍設備直接連接,另一方面繼電器和PLC連接,再由PLC與RATO進行信息交互。
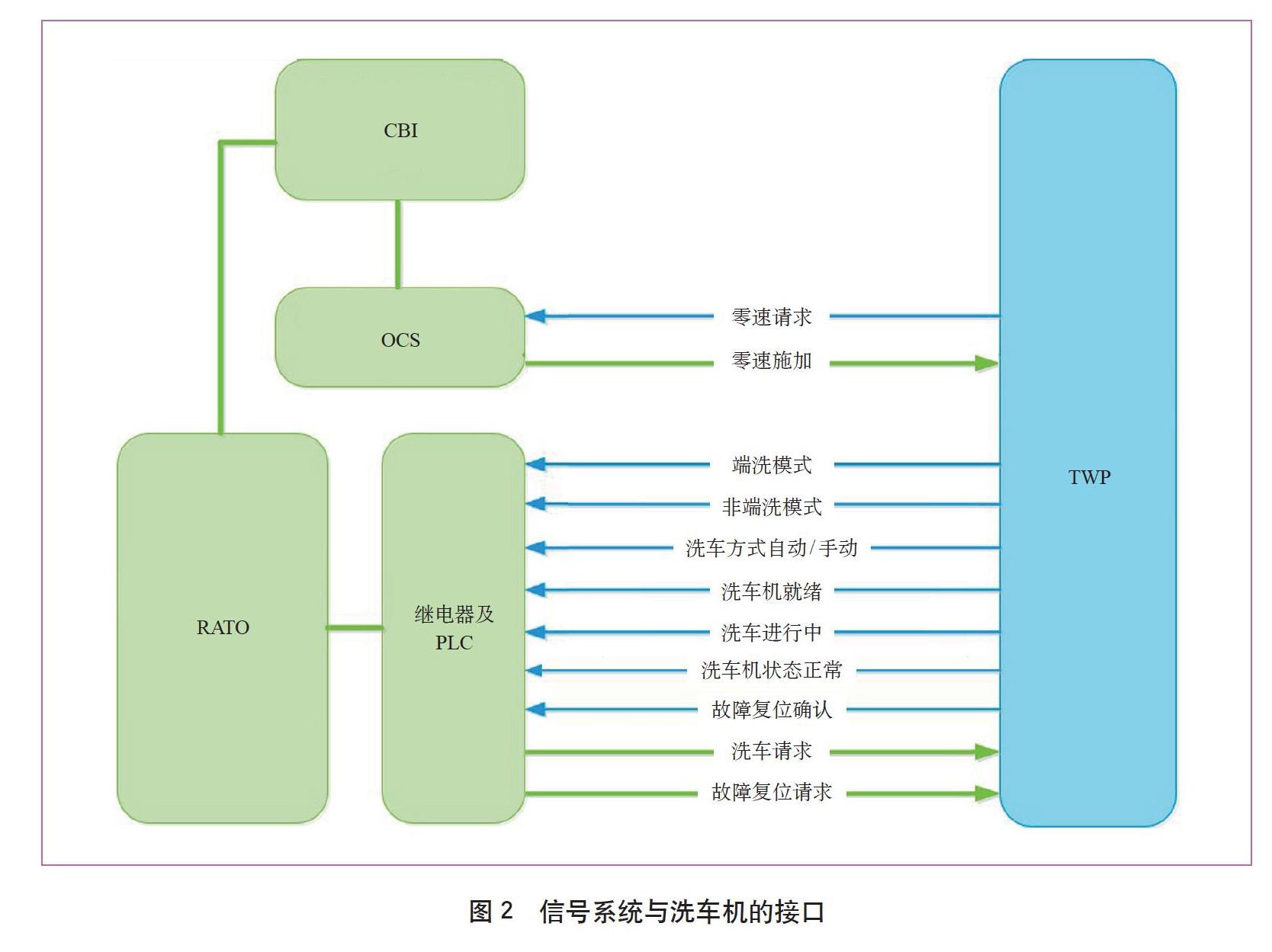
信號系統與洗車機系統的信息交互如圖2所示,信號系統與洗車機(Train Wash Plant, TWP)的接口信息分為安全信息和非安全信息。
安全信息采用硬線直連方式,實現洗車機和OCS的接口,主要傳輸列車零速相關信息。非安全信息采用繼電器和PLC共用方式,實現洗車機和RATO的接口,主要傳輸洗車模式、請求、各類中間狀態信息等。
3.2 自動洗車接口信息分析
下面結合自動洗車運營場景,對信號系統與洗車機接口的安全和非安全信息進行詳細分析。
3.2.1 安全信息分析
安全信息主要包括“零速請求”和“零速施加”。
(1)“零速請求”是當洗車機不允許列車在洗車區內移動,或者不允許列車進出洗車區時,洗車機激活該信號。信號系統將響應該請求,施加零速限制。正常洗車情況下,當列車停在正確的洗車位置時,該信號將被激活且將開始洗車。
(2)“零速施加”是信號系統在收到洗車機的零速限速請求后將無條件施加零速限制,零速已限制狀態信號將通過該信號回送給洗車機。此時相關信號機顯示紅燈。
3.2.2 非安全信息分析
非安全信息的輸入包括端洗模式、非端洗模式、洗車方式自動/手動、洗車機就緒、洗車進行中、洗車機狀態正常、故障復位確認;非安全信息的輸出包括洗車請求、故障復位請求。
(1)端洗模式是全車(含車頭、車尾和車身)清洗的洗車模式,信號系統將根據接收到的這個信號來執行洗車流程。
(2)非端洗模式是僅清洗車身(不含車頭及車尾)的洗車模式,信號系統將根據接收到的這個信號來執行洗車流程。
(3)洗車方式自動/手動是指示當前洗車機的控制方式:自動方式是指洗車自動進行,不需要人工干涉,高電平有效;手動方式是默認狀態,低電平有效,由現場的洗車員控制洗車,司機手動駕駛列車,該模式下信號系統僅排列入庫進路,FAM模式列車無法進入洗車庫。
(4)洗車機就緒是指當信號系統有計劃進行列車洗車時,發送“洗車請求”給洗車機,洗車機在收到信號系統的“洗車請求”且滿足洗車條件時,激活該信號。當洗車機對于計劃洗車作業未準備就緒時,如果未收到洗車機準備就緒命令,信號系統不會自動為列車排列至洗車機的進路。
(5)洗車進行中是為ATS系統指示洗車正在進行的狀態信息。
(6)洗車機狀態正常是洗車狀態的概括信息,用于為ATS系統指示洗車機狀態。當洗車過程發生需要人工干涉的故障時,如暫停、超時等,洗車機使該信號失活。該失活信號允許操作員確認且當有需要時使用復位命令。
(7)故障復位確認是洗車機在收到信號系統“故障復位請求”后的確認信號,此命令為人工命令。洗車機在清除所有內部狀態后重置到初始狀態。如果洗車機無法重置,洗車機工作人員確保安全后也能發出此命令,此時安全由人工保證。允許ATS操作員排列進路使列車駛離洗車區。
(8)洗車請求是指當有列車根據時刻表洗車時,信號系統會發送“洗車請求”信號給洗車機,使洗車機初始化。
(9)故障復位請求是操作員在故障狀態下發出復位命令使洗車狀態回到初始狀態,一旦信號系統收到洗車機的回復確認信號,信號系統將重置自己的狀態。
4 結語
全自動運行系統的自動洗車功能,依賴于信號系統與洗車機之間的控制接口,通過該接口安全信息和非安全信息的交互,實現自動端洗和非端洗模式,同時支持手動洗車方式以及故障情況下的降級洗車模式。
在接口分析中發現,最為關鍵的控制點是需要洗車機在準確而可靠地判定列車完全進入洗車位置后向信號系統請求零速,信號系統以此請求為基礎才能自動施加零速,確保洗車作業的正常進行,以避免洗車時列車誤動損壞洗車設備或刮傷列車外墻。這對洗車機的安全性和可靠性提出更高的要求,對洗車機工藝設備控制邏輯的改進具有一定的指導意義。
此外,寒冷地區的洗車庫往往帶有庫門,自動洗車過程中還需要控制庫門的打開和關閉,這就需要在洗車機接口中增加安全信息,即庫門的控制命令和狀態反饋。
參考文獻
[1]中國城市軌道交通協會. 城市軌道交通全自動運行系統技術規范 第1部分:需求規范(征求意見稿)[S]. 北京:中國城市軌道交通協會,2018.
[2]趙曉峰. 膠輪路軌全自動旅客捷運(APM)信號系統研究[J].城市軌道交通研究,2016(增刊2):62-66.
[3]Ivan Wu, Tanarat. Signalling and train wash plant ICD [R]. Changzhou:Bombardier NUG Signalling Solutions Co.,Ltd,2019.
[4]王建文,高洪波. 城市軌道交通全自動停車場車輛自動清洗功能設計與實現[J].鐵路計算機應用,2017(9):68-70.
[5]夏季. 全自動駕駛模式下地鐵車輛段洗車機技術接口分析[J].現代城市軌道交通,2018(5):21-24.
[6]寇若嵐. 全自動運行信號系統與洗車機的接口方案研究[J].鐵路通信信號工程技術,2018(10):68-72.
[7]張強,張揚,劉波,等. 城市軌道交通全自動駕駛列檢庫、洗車庫的車庫門安全防護方案[J].城市軌道交通研究,2018(1):132-136.
[8]嚴建鵬. CBTC系統正線信號機顯示方案及邏輯實現分析[J].現代城市軌道交通,2015(6):4-8.
[9]吳明,賀觀. 跨座式單軌交通信號系統[M].四川成都:西南交通大學出版社,2016.
[10]中國城市軌道交通協會. 輕型跨座式單軌交通設計導則[S]. 北京:中國城市軌道交通協會,2018.
[11]杜時勇,陳華銀. 地鐵全自動洗車方案研究[J].鐵道通信信號,2017(8):62-65.
[12]王曉保,顏燕. 城市軌道交通停車場洗車庫內接觸網設置研究[J].都市快軌交通,2004(4):55-58.
[13]王玉敏. 地鐵車輛自動洗車工藝研究[J].科技創新與應用,2019(30):76-78.
[14]范俊韜,陳智釗,張三多,等. 廣佛地鐵列車清洗模式優化[J].軌道交通裝備與技術,2019(1):33-35.
[15]史文飛,王升福,于洋,等. SJSG型列車自動清洗機控制流程優化研究[J]. 設備管理與維修,2019 (12):125-126.
[16]張明. 全自動運行地鐵車輛基地工藝設計研究[J]. 現代城市軌道交通,2018 (5):42-44.
[17] 張小華. 地鐵列車洗車機端洗軸的改造研究——以深圳地鐵公司列車洗車機為例[J]. 技術與市場,2012 (8):46,48.
[18] 黃志紅. 車輛段/停車場增設全自動運行功能的分析[J]. 現代城市軌道交通,2015 (5):4-6.
[19] 樊梁. 南京地鐵1號線列車自動清洗機電控系統大修[J]. 哈爾濱鐵道科技,2018(1):23-24,27.
[20] 杜時勇,陳華銀. 地鐵全自動洗車方案研究[J]. 鐵道通信信號,2017(8):62-65.
[21] 馮浩楠,黃蘇蘇,付偉,等. 城市軌道交通全自動運行系統多功能仿真平臺設計與實現[J]. 實驗技術與管理,2020(1):238-241,249.
收稿日期 2019-11-28
責任編輯 胡姬
Analysis and research on interface between FAO
signaling system and train washing machine
Luo Binlong, Zhao Xiaofeng, Sun Sinan, et al.
Abstract: The realization of automatic train washing function of fully automatic operation system depends on the interface performance between signaling system and train washing machine. Based on the comprehensive analysis of the types of train washing machines, this paper designs and analyzes the interface of mobile mode train washing in detail, describes the cleaning scenarios under the automatic end washing and automatic non-end washing modes, and considers the manual train washing mode and degraded train washing mode, so as to put forward a complete and feasible interface technical scheme.
Keywords: urban rail transit, FAO, signaling system, automatic train washing, interface analysis