船載框架式整平器掃淺性能分析
2020-04-28 13:52:28周丙浩朱時茂鄭金龍
水運工程 2020年4期
關(guān)鍵詞:船舶
周丙浩,朱時茂,焦 鵬,鄭金龍
(中港疏浚有限公司,上海 200136)
隨著疏浚工程向大型化、精細(xì)化發(fā)展,基床平整度要求越來越高[1-2]。基于長江南京以下12.5 m深水航道二期工程,荊雷等[3]對于梯形空心構(gòu)件安裝基床 進(jìn)行了船載挖機(jī)水下自動化基床整平系統(tǒng)的設(shè)計;程茂林等[4]基于水下拋石基床,形成浮式智能控制水下基床整平施工工法;為解決沉管隧道建設(shè)難題,廣州打撈局聯(lián)合中船集團(tuán)第708所、華南船舶機(jī)械有限公司及天津水運工程研究院研發(fā)全智能水下3D碎石整平清淤船,并預(yù)計于2020年6月建成投產(chǎn)[5-6]。
自航式耙吸挖泥船在疏浚施工過程中,受環(huán)境影響以及自身性能的制約,所疏浚的海底河床經(jīng)常會出現(xiàn)高低不平的壟、溝、淺點。為掃除這些淺區(qū),達(dá)到工程的設(shè)計要求,僅靠耙吸式挖泥船,耗時多、成本高,掃淺效果差。本文基于萊州14.3 m深水航道工程,引入船載框架式整平船舶——“航工301”整平船(圖1)。針對船載框架式整平器的掃淺性能,本文建立CFD仿真模型,分析船載框架式整平器各浪向下的水動力性能,并進(jìn)行海上試驗,以提高工程后期的掃淺效率,提升工程整體效益,減本降耗。

圖1 “航工301”整平船
1 計算原理與模型
1.1 運動方程
根據(jù)動力學(xué)方程和牛頓第二定律,本文研究的船載框架式整平器的運動方程為:
(1)

(2)
1.2 模型參數(shù)
1.2.1總體布置
如圖2所示,整平船主體由拖輪、船載框架式整平器、A字架、單餅滑車、頂牽索、起升鋼絲繩、牽引鋼絲繩等設(shè)備構(gòu)成。通過絞纜機(jī)收放拖纜,使整平器垂直升降,以控制整平器底面高程。借助拖輪航行拖力,依靠整平器自重及前部的切削刀口進(jìn)行破土、消除淺點,并填至超深區(qū)域。

圖2 總體布置
船載框架式整平器(圖3),寬12.53 m(船寬方向),長3.8 m(船長方向),高0.925 m(主體),自質(zhì)量約22 .5 t,可配重約至300 kN,提升系統(tǒng)的額定提升力為400 kN,最大工作水深為25 m,最大復(fù)合應(yīng)力140 MPa;拖帶鋼絲繩2根,左右兩舷各配置1根,一端配閉式索具,用卸扣連接整平器拖帶眼板,另一端為眼環(huán),連接到主甲板艏部兩舷的雙帶纜樁,型號44-6×36WS-IWRC 1960 B ZS,直徑φ44 mm,長度56 m,破斷力1 350 kN;每根拖索各配置1根回收繩;起升鋼絲繩2 根,型號44-6×36WS-IWRC 1960 B ZS,直徑φ44 mm,長度100 m;A 字架2臺,由2根頂部連接的鋼管構(gòu)成,下端與船體上的眼板鉸接,主管頂部設(shè)頂牽索眼板,下部設(shè)滑車眼板;頂牽索2 根,型號60-6×36WS-IWRC 1960 B ZS,一端與A 字架主管頂部的眼板相連,另一端與船體主甲板上的眼板相連,直徑φ60 mm,長度10.3 m,破斷力2 520 kN。

圖3 船載框架式整平器
1.2.2水動力模型
選用船舶專用仿真軟件AQWA對整平船進(jìn)行水動力模擬分析計算,取模型水下部分,換算微小桿件的相對力和力矩,不計外形的影響,簡化后的模型如圖4所示。利用混合型面網(wǎng)格對模型進(jìn)行網(wǎng)格劃分,網(wǎng)格尺寸取0.5 m,網(wǎng)格數(shù)為9 193個。
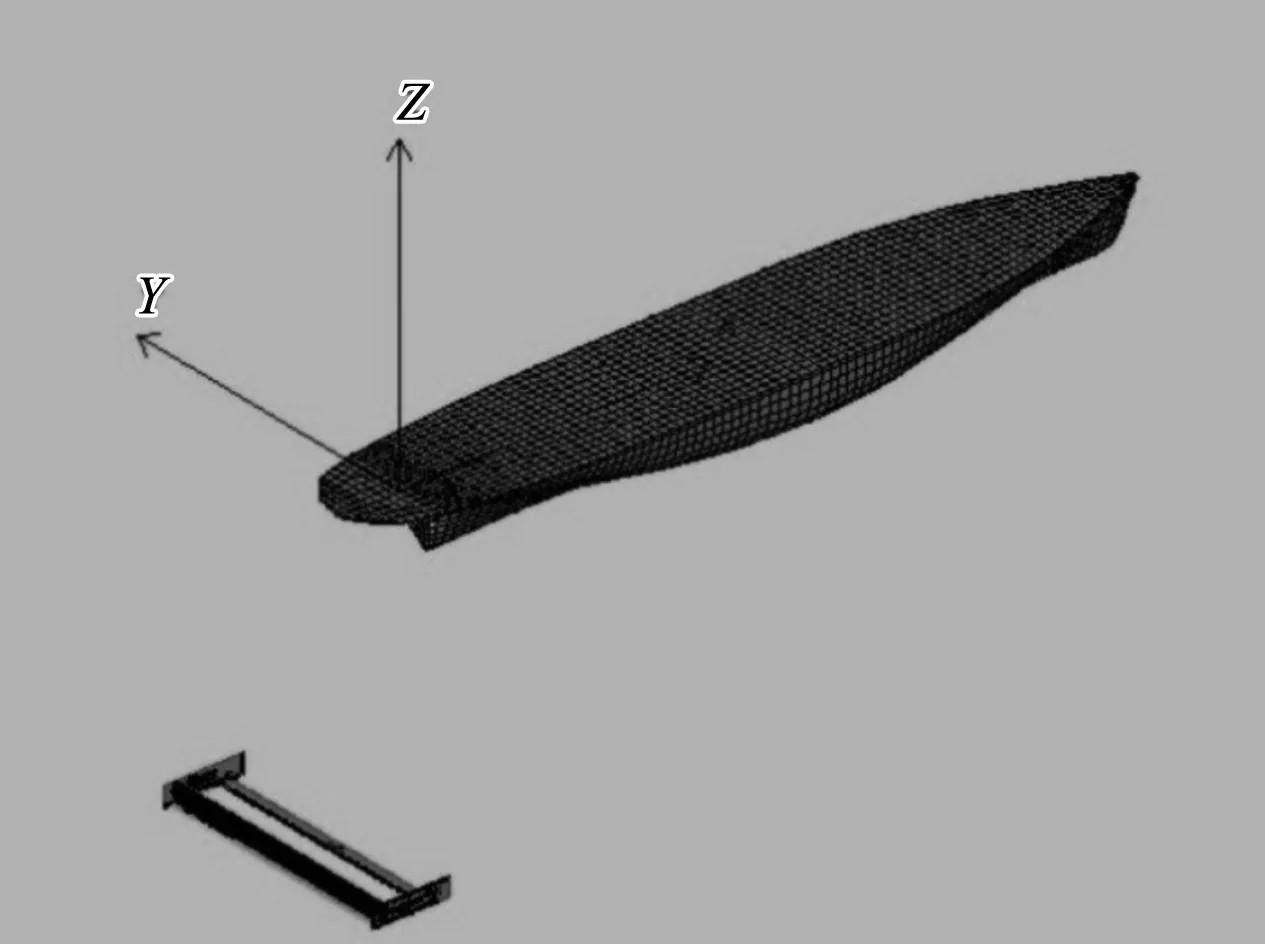
圖4 AQWA計算模型
2 海上試驗
2.1 項目背景
萊州港2#港池及5萬噸級航道工程,界河口—石虎嘴為沖刷的平原砂質(zhì)海岸,岸線呈NE~SW走向;石虎嘴—三山島附近為穩(wěn)定的平原砂質(zhì)海岸,岸線呈NNE~WSW走向,岸線向西延伸至刁龍嘴。刁龍嘴西北萊州淺灘地形復(fù)雜,其上分布有眾多的砂脊溝槽,主要為復(fù)羽式砂嘴、砂壩環(huán)繞的瀉湖所構(gòu)成的海灘、瀉湖平原。港區(qū)岸段為穩(wěn)定的平原砂質(zhì)海岸,岸線較順直,岸灘平坦。水下等深線基本呈SW~NE走向,-5 m等深線以內(nèi)有兩列砂壩相間。-5、-8、-10 m等深線距岸分別為600~800、1 000~1500、7 000 m。
2.2 試驗工況

圖5 站點分布

表1 顆粒分析
2.3 工藝參數(shù)
萊州港航道設(shè)計水深14.3 m,最高潮位約1.8 m,最低潮位約0.8 m,為充分發(fā)揮整平器的作用,掃淺整平作業(yè)中須控深14.3 m,保證起吊鋼絲繩垂直牽引鋼絲繩受力,牽引鋼絲繩最佳計算長度為41.1 m。由于船舶條件限制,通過在纜樁上挽套牽引鋼絲繩,將牽引鋼絲繩長度設(shè)定為41.6 m。掃淺整平作業(yè)中根據(jù)潮位變化每半小時調(diào)整起吊鋼絲繩長度,獨立淺點沿2個方向過線一次基本保證消除,淺點集中區(qū)域,以S形走線結(jié)合多方向過線,由淺至深逐段掃淺,保持雙車前進(jìn)2(940 rmin),船速1.03~1.54 ms。
3 結(jié)果與分析
3.1 數(shù)據(jù)分析
萊州5萬噸級航道全長26.4 km,設(shè)計水深14.3 m。根據(jù)表2可知,57 078個測點中,淺點總數(shù)4 978個,主要分布在W0+000~W14+692區(qū)段,北半槽淺點率較高,最高可達(dá)14.28%,最淺水深13.9 m,平均淺點率6.1%,平整度最低為0.15,W0+000~W4+000、W4+000~W9+000、W9+000~W14+692剩余土方量分別為3 992、6 791.6、15 594 m3。

表2 水深測圖分析
3.2 水動力性能
幅值響應(yīng)算子RAO是反映船舶運動響應(yīng)的重要參數(shù),由于整平器位于海底,運動響應(yīng)可忽略不計,本文只分析整平器作用下船舶的運動響應(yīng)情況。計算時取水深為14 m,船舶吃水為2.8 m,計算頻域為0~3 rads,計算步長為0.1 rads。根據(jù)船舶的對稱性,取0°、45°、90° 3個方向進(jìn)行水動力計算。圖6所示為3個方向下、船舶6個自由度的頻率響應(yīng)曲線。
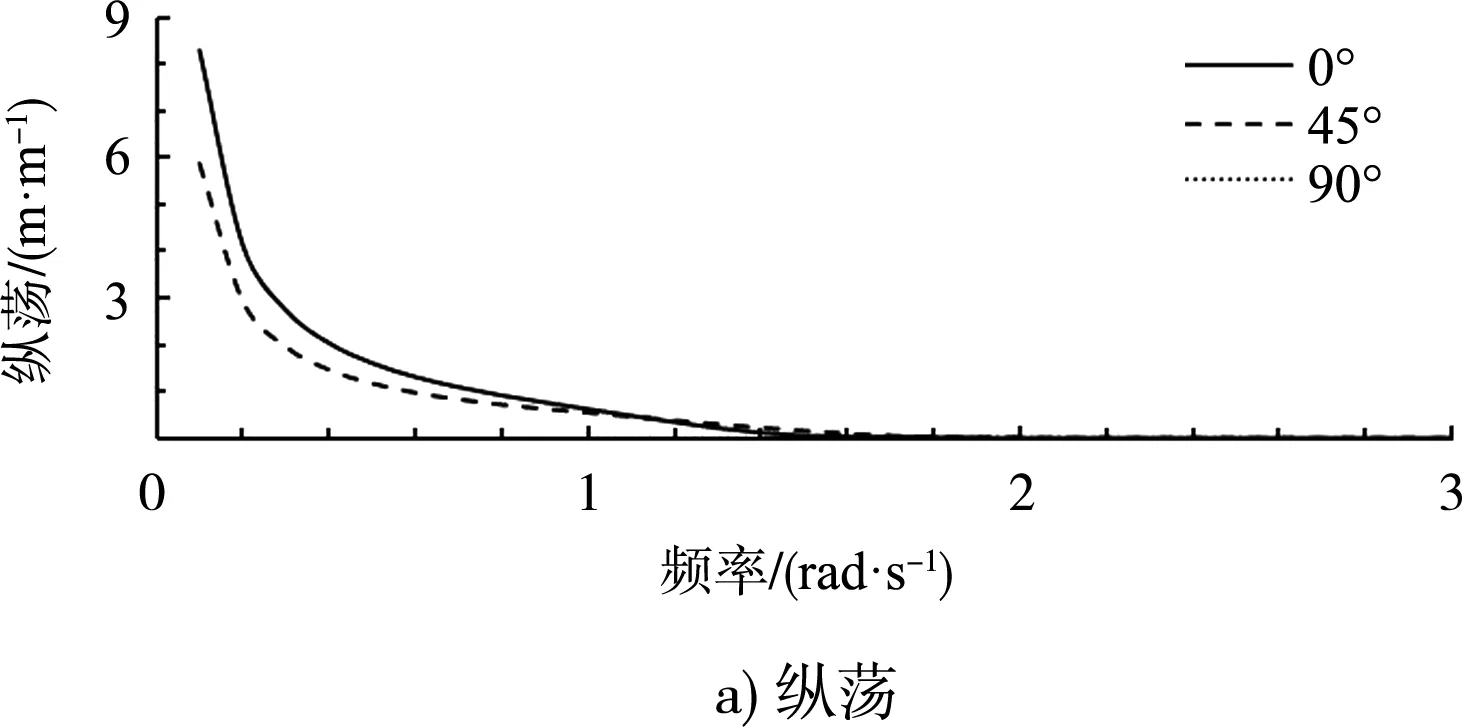
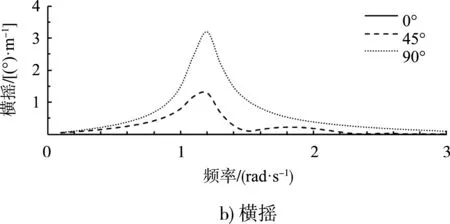
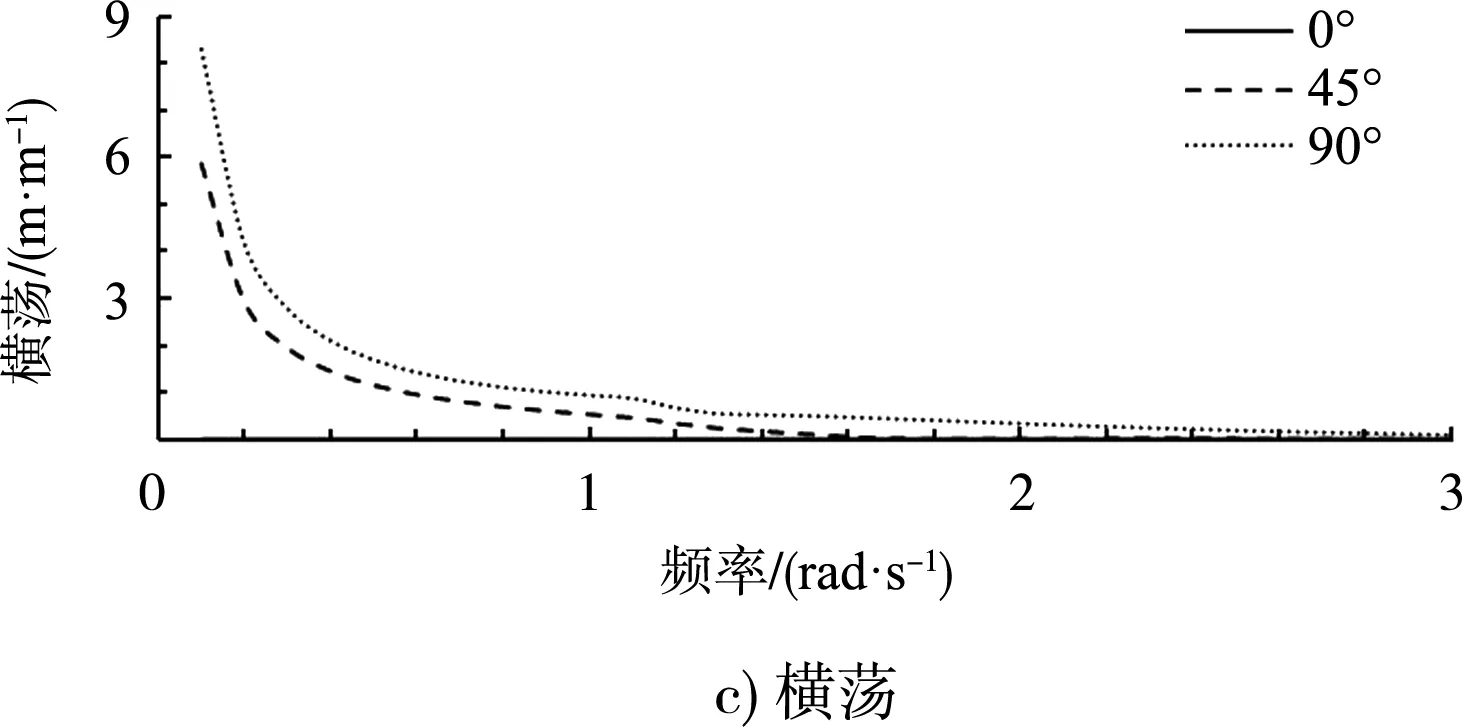

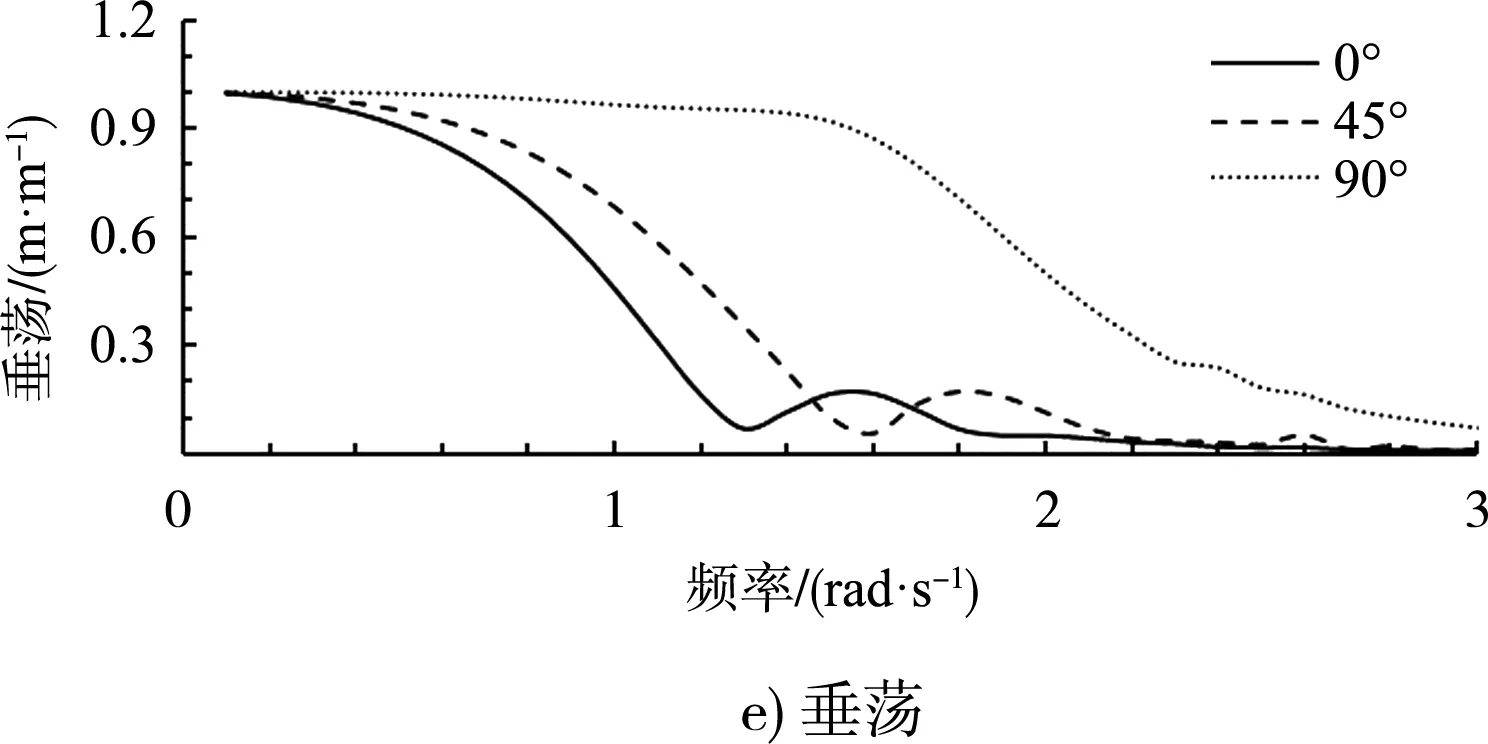
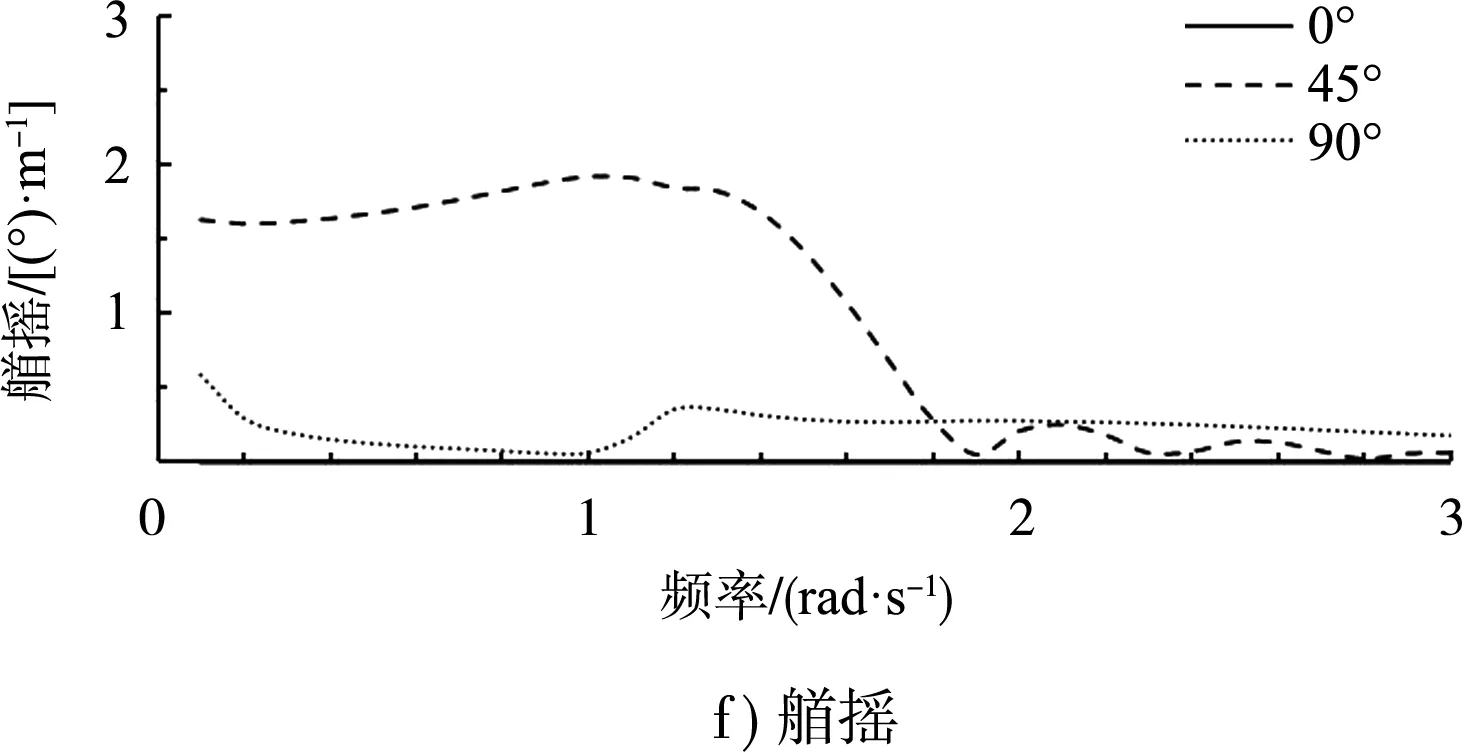
圖6 頻率響應(yīng)曲線
如圖6所示,船舶橫蕩和縱蕩的運動響應(yīng)幅值相對較大,且隨著頻率的增加,呈逐漸減小的趨勢;由于整平器拖曳力的影響,45°浪向下,垂蕩的運動響應(yīng)幅值遠(yuǎn)大于0°和90°浪向下的響應(yīng)幅值;隨著浪向的變化,船舶縱搖和艏搖運動的變化趨勢發(fā)生改變;0°浪向下,船舶所受縱向力較大、橫向力較小,相應(yīng)縱搖幅值較大、橫搖幅值較小;90°浪向下,船舶所受橫向力較大、縱向力較小,相應(yīng)橫搖幅值較大、縱搖幅值較小;45°浪向下,船舶所受側(cè)向力較大,相應(yīng)艏搖幅值較大;總體上,在整平器的作用下,船舶的運動幅值響應(yīng)算子較小,船舶穩(wěn)定性較高。
3.3 掃淺效果
本次實船試驗風(fēng)浪較小,作業(yè)精度與質(zhì)量主要受潮位影響,根據(jù)潮位儀讀數(shù)計算最佳整平深度,并實時調(diào)整。圖7所示為船舶走線與過線后的軌跡與水深圖,船載框架式整平器在重力作用下,通過2條垂向鋼絲繩、2條拖帶鋼絲繩與船長近似形成直角三角形,控制整平深度并限制整平器漂移。由圖7a)可知,獨立淺點沿2個方向過線一次基本保證消除,但整平器單邊受力時,受力不穩(wěn),導(dǎo)致舵向難以掌控、易偏向,此時須多向過線;淺點集中區(qū)域,以S形走線結(jié)合多方向過線,由淺至深逐段掃淺,再根據(jù)水深測圖,消除零星淺點。經(jīng)業(yè)主驗收,最終水深測圖顯示,淺點掃除率達(dá)100%,效果顯著。


圖7 施工效果圖
3.4 經(jīng)濟(jì)性
“航工301”輪于萊州港共計施工16 d,主機(jī)運轉(zhuǎn)時間161 h,施工時間137.3 h。總計0#油耗53.3 t,淡水消耗31.5 t。同比4 000 m3艙容的“航浚4009”輪耙吸挖泥船,預(yù)計掃淺施工工期9 d,以黃驊港施工一周油水消耗平均值計算(180#油耗9.82 td,4#油耗7.56 td,淡水16 td),需180#油耗88.38 t,4#油耗68.04 t,淡水144 t。綜上,可節(jié)省燃油約103 t、淡水約112.5 t,另考慮管理、船舶折舊、人工等成本,“航工301”輪優(yōu)勢顯著。
4 結(jié)論
1)在整平器的作用下,船舶的運動幅值響應(yīng)算子總體較小,船舶穩(wěn)定性較好;船舶橫蕩和縱蕩的運動響應(yīng)幅值相對較大,且隨著頻率的增加,呈逐漸減小的趨勢;45°浪向下,垂蕩的運動響應(yīng)幅值遠(yuǎn)大于0°和90°浪向下的響應(yīng)幅值;隨著浪向的變化,船舶的運動幅值變化較大,相應(yīng)主浪向下的船舶縱搖、橫搖、艏搖運動幅值最大。
2)船載框架式整平器在重力作用下,通過2條垂向鋼絲繩、2條拖帶鋼絲繩與船長近似形成直角三角形,根據(jù)潮位儀讀數(shù)計算最佳整平深度,并實時調(diào)整,控制整平深度,獨立淺點沿2個方向過線,單邊受力時,須多向過線;淺點集中區(qū)域。以S形走線結(jié)合多方向過線,由淺至深逐段掃淺。
3)施工周期內(nèi)同比耙吸式挖泥船,燃油節(jié)省約103 t、淡水節(jié)省約112.5 t,淺點掃除率達(dá)100%,效果顯著。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:08:26
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
機(jī)械工業(yè)標(biāo)準(zhǔn)化與質(zhì)量(2022年6期)2022-08-12 02:07:42
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30