礦用自卸車電傳動系統組合試驗技術研究
2020-04-26 09:40:18
礦山機械 2020年4期
關鍵詞:系統
株洲中車時代電氣股份有限公司 湖南株洲 412001
1 937 年美國開啟了用自卸車運輸礦石和巖石的時代,這時自卸車仍是傳統的機械傳動方式。隨著礦山規模的不斷擴大,對礦用自卸車的噸位、性能和數量等都提出了更高的要求,傳統的機械傳動自卸車已不能滿足實際需要[1]。而電動輪自卸車與傳統機械傳動自卸車相比,具有結構簡單可靠、制動靈活、維修費用低、使用壽命長、牽引性能好和運行平穩等一系列優點,目前絕大多數礦用自卸車都是電動輪自卸車。而電傳動根據發電機和電動機的不同,又經歷了“直流發電機—直流電驅動系統”、“交流發電機—直流電動機驅動系統”、“交流發電機—交流電動機驅動系統”等過程。而交流電動機與直流電動機相比,具有體積小、噪聲低和成本低的優點,目前交流電傳動系統已成為主流,也是礦用電動輪車發展的主要方向。
礦用自卸車電傳動系統組合試驗主要用于驗證變流器、電動機及其控制系統在組合系統的匹配性[2],以便及早發現設計問題,降低技術風險,縮短裝車后的調試時間。但目前礦用自卸車僅有整車的試驗標準,而針對電傳動系統卻沒有相應的組合試驗標準作為規范性文件,導致在開展礦用自卸車電傳動系統的試驗時,試驗項目、試驗方法均由主機廠或者生產廠商提出,這樣不可避免地會出現試驗項目不全面、試驗方法不合適等情況,從而對電傳動系統驗證不充分,導致出現裝車后調試周期長、技術風險大等問題。為此,經過長期研究,筆者研制了一套礦用自卸車電傳動系統組合試驗系統,并基于此進行試驗研究,歸納出礦用自卸車電傳動系統應進行的組合試驗項目,結合該試驗系統進行試驗驗證,為礦用自卸車電傳動系統的設計、制造、檢驗、相關試驗標準的建立提供參考。
1 礦用自卸車電傳動系統工作原理
典型的礦用自卸車電傳動系統工作原理如圖 1 所示。電傳動礦用自卸車常采用自身配置的發動機帶動發電機發電,發電機發出的三相交流電輸送至變流器后,經過整流、逆變等環節,轉換為頻率可調的三相交流電供給交流電動機,驅動電動機運行。控制裝置根據指令控制變流器的輸出,實現不同的轉速或轉矩控制。此外,控制系統還可根據設備各系統工作狀態,實現顯示、報警及各種保護功能。

圖1 礦用自卸車電傳動系統工作原理Fig.1 Working principle of electric drive system of mining dump truck
2 組合試驗系統方案
為了全面驗證礦用自卸車電傳動系統設計參數,根據圖 1 所示的礦用自卸車電傳動系統工作原理,設計了礦用自卸車電傳動系統組合試驗系統,其結構如圖 2 所示。
2.1 工作原理
該組合試驗系統采用了典型的“背靠背”能量回饋原理,其主要由陪試系統(含變壓器、變流器及其控制裝置、電機等)、交流供電系統、測控系統、傳動系統、被試設備(含變流器及其控制裝置、牽引電機等)等組成。根據實際情況,被試牽引電機可以是 1 臺,也可以是多臺。為了便于理解,下面僅描述單臺被試牽引電機的情況,多臺牽引電機情況與之相似。
試驗時將兩臺電機通過機械聯軸器連接,牽引電機將電能轉換為機械能,負載電機將機械能轉換為電能,并經陪試變流器及其控制裝置反饋回電網。反饋系統可將能量反饋回電網,而電網僅需要提供整個系統所需的能量即可,極大地避免了能量浪費。陪試電機一般采用轉速閉環控制,被試牽引電機采用轉矩控制,根據試驗需求的不同,被試牽引電機可實現牽引、制動等不同工況的模擬。
當被試牽引電機在牽引工況下工作時,通過調節陪試電機的轉速,進行被試礦用自卸車電傳動系統在不同車速下牽引能力、牽引效率、轉矩控制精度等性能的驗證;此時,被試牽引電機轉速小于同步轉速,工作在電動狀態,而陪試電機轉速大于同步轉速,工作在發電狀態。牽引工況下系統的能量流動如圖 3 所示。當被試牽引電機在制動工況下工作時,通過調節陪試電機的轉速,進行被試礦用自卸車電傳動系統在不同車速下制動能力的驗證;此時,被試牽引電機轉速大于同步轉速,工作在發電狀態,而陪試電機轉速小于同步轉速,工作在電動狀態。制動工況下系統能量流動如圖 4 所示。
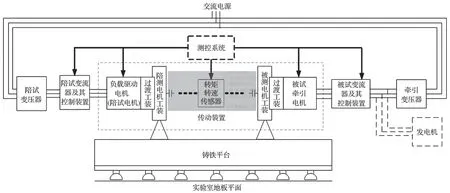
圖2 礦用自卸車電傳動系統組合試驗系統結構示意Fig.2 Structural sketch of combined test system for electric drive system of mining dump truck

圖3 牽引工況下系統能量流動示意Fig.3 System energy flow sketch in driving mode
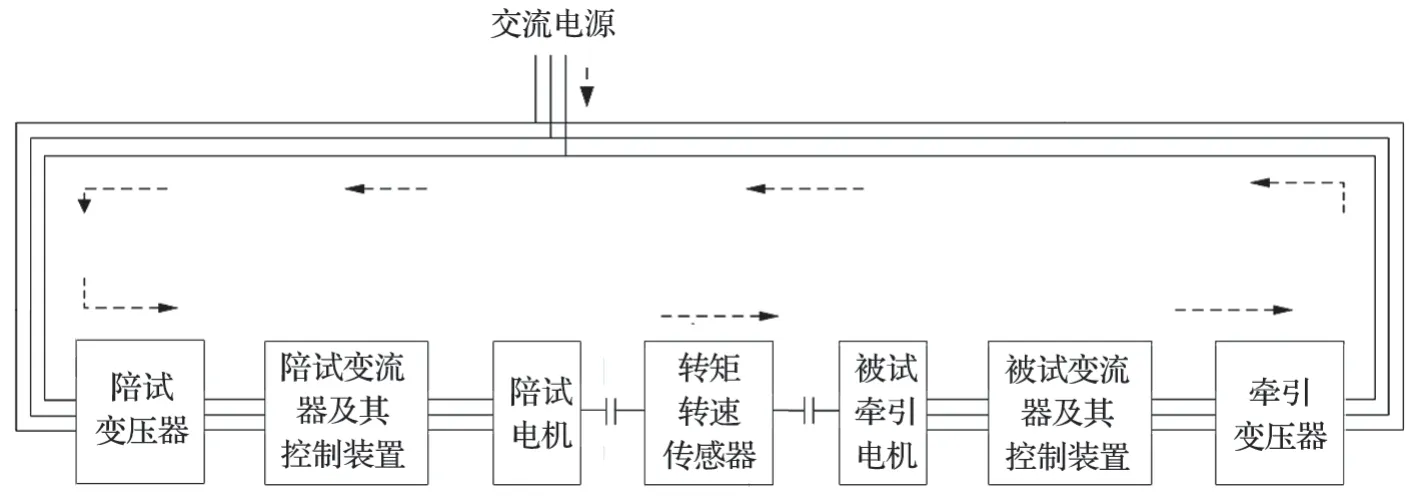
圖4 制動工況下系統能量流動示意Fig.4 System energy flow sketch in braking mode
采用“背靠背”能量回饋原理,不但能夠降低試驗中的能量損耗,而且可以達到以小功率等級的電源實現大功率產品的試驗需求,并且根據控制模式的轉變,可以非常方便地實現礦用自卸車電傳動系統在不同轉速下牽引、制動工況的模擬。
2.2 被試電傳動系統
被試電傳動系統一般由發電機(根據需求,也可采用變壓器供電)、變流器及其控制裝置、牽引電機等組成。被試變流器及其控制裝置可以采用外接交流電源供電,也可由發電機供電。根據實際情況,當被試牽引電機不止 1 臺時,并列布置在圖 2 中虛線方框內,多臺被試牽引電機均由同一臺被試變流器及其控制裝置控制;但是當需要驗證發電機、變流器及其控制裝置溫升時,應配備多臺牽引電機,從而使發電機、變流器及其控制裝置在額定功率下工作。被試電傳動系統部件應根據制造商與用戶協議,在相應測量點安裝溫度傳感器,且布置在預期最高溫度點,并對安裝傳感器的最佳位置負責。
2.3 陪試負載系統
陪試變流器及其控制裝置、陪試電機與被試變流器及其控制裝置、被試牽引電機可以相同也可以不同,相同時被試件與陪試件可以互換[3]。這種方式可根據不同類型的礦用自卸車電傳動系統臨時搭建,試驗時需要提供兩套完全一樣的電傳動系統,試驗時一套工作在牽引工況下,而另一套工作在制動工況下,使用時應評估電傳動系統牽引能力與制動能力的匹配性。基于成本和可靠性因素,一般不采用這種模式。
采用不同設備時,陪試電機可由同一臺陪試變流器及其控制裝置進行控制,也可由不同的陪試變流器及其控制裝置進行控制。當由不同的陪試變流器及其控制裝置進行控制時,這些陪試變流器及其控制裝置應相互通信,以保證陪試電機控制情況的一致性。采用這種方式時,一般根據產品類型進行通用性設計,使其能夠普遍適用于多種類型礦用自卸車電傳動系統。該系統陪試負載系統的轉速控制范圍應大于被試電傳動系統的轉速范圍,且其在不同轉速下的牽引/制動轉矩輸出能力應大于被試電傳動系統在相應轉速下的最大制動/牽引轉矩輸出能力。
2.4 測試系統
測試系統結構如圖 5 所示。它可以實現電傳動系統的電壓、電流等電參數以及基于電壓、電流的功率、諧波等參數的測量,測量精度高于 0.5%;亦可進行轉矩、轉速的測量,測量精度高于 0.5%;同時可測量被試件不同位置的溫度,溫度測量主要采用直接測量和間接測量兩種方式。
參數的采集根據不同的數據類型,主要采用功率分析儀、示波器等測量儀器,PXI 自動化測量平臺以及通過 CAN 卡等方式實現。其中被試變流器及陪試變流器通過 CAN 進行上下位機通信,而電壓、電流等參數采用功率分析儀等測量儀器或者 PXI 自動化測量平臺進行測量。

圖5 礦用自卸車電傳動系統組合試驗系統測試系統結構示意Fig.5 Structural sketch of testing system for combined test system for electric drive system of mining dump truck
2.5 試驗中的冷卻
試驗應在規定的冷卻條件下進行,為模擬不同的冷卻條件,冷卻設備的冷卻能力應可調,且當冷卻介質溫度與規定的環境溫度不同進行試驗時,溫度測量結果應進行線性修訂。當采用強迫風冷時,為了保證測試的準確性,進風筒的直線長度應不小于其直徑的7~10 倍。
3 組合試驗項目
為了全面驗證礦用自卸車電傳動系統的設計參數及性能,經過大量的試驗研究(包括型式試驗、研究性試驗),不斷積累試驗驗證經驗,并通過對礦用自卸車使用環境的分析,結合 JB/T 7641.1—1994《電傳動礦用自卸車整車技術條件》、JB/T 7641.2—1994《電傳動礦用自卸車整車試驗方法》,參考軌道交通內燃機車組合試驗標準 GB/T 25117.3—2010《軌道交通 機車車輛 組合試驗 第 3 部分:間接變流器供電的交流電動機及其控制系統的組合試驗》,及電動汽車相關標準 GB/T 18488.1—2015《電動汽車用驅動電機系統技術條件》、GB/T 18488.2—2015《電動汽車用驅動電機系統試驗方法》等,總結了礦用自卸車電傳動系統組合試驗項目,如表 1 所列。按照圖 6 中的試驗流程進行逐項驗證,將很好地保證礦用自卸車電傳動系統相關性能。
試驗項目可參照 GB/T 25117.3—2010、GB/T 18488.2—2015 等標準中的試驗方法實施,相關測試結果應滿足 JB/T 7641.1—1994 及該車型技術文件要求。考慮到對整車爬坡性能的要求,在進行電動機轉矩特性試驗時,應重點驗證電動機在低轉速下的轉矩特性。同時 JB/T 7641.1—1994 對電傳動系統的耐壓等試驗有所要求,但由于耐壓等試驗在相關部件的型式試驗中進行,筆者主要研究電傳動系統的組合試驗,因此在本文中不進行敘述。

表1 礦用自卸車電傳動系統組合試驗項目Tab.1 Items of combined test for electric drive system of mining dump truck
4 組合試驗驗證

圖6 試驗流程Fig.6 Process flow of test
結合圖 2 所示的試驗系統,采用圖 5 所示的測試系統,筆者選取典型的某型礦用自卸車電傳動系統進行組合試驗研究,該傳動系統的變流器和牽引電機的主要參數分別如表 2、3 所列。圖 7~10 給出典型項目的測試曲線。
需要說明的是,在利用該系統進行礦用自卸車電傳動系統組合試驗時,各部件(變流器及其控制裝置、牽引電機等)部分型式試驗驗證結果可同步獲得。
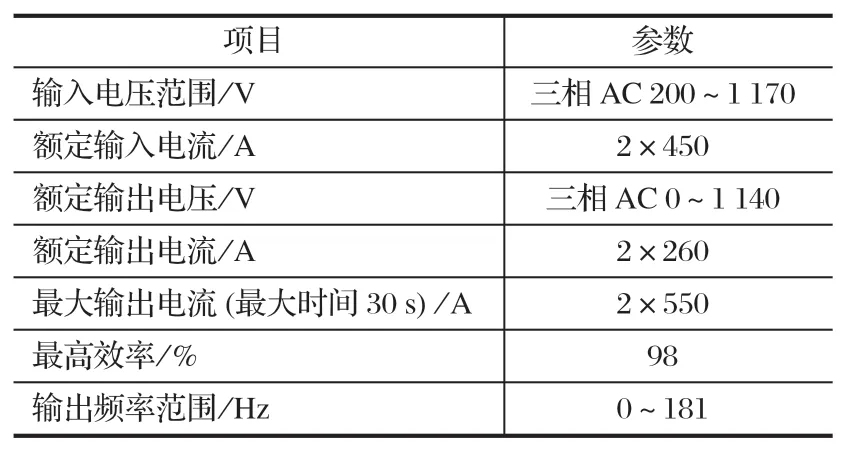
表2 某型礦用自卸車電傳動系統變流器主要參數Tab.2 Main parameters of current inverter in electric drive system of a mining dump truck

表3 某型礦用自卸車電傳動系統牽引電機主要參數Tab.3 Main parameters of traction motor in electric drive system of a mining dump truck
圖7 礦用自卸車電傳動系統典型牽引特性曲線Fig.7 Typical drive characteristic curve of electric drive system of mining dump truck
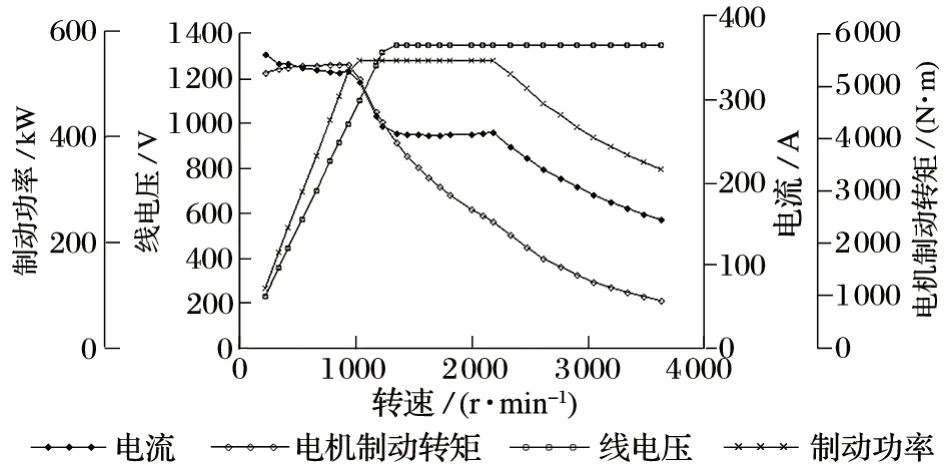
圖8 礦用自卸車電傳動系統典型制動特性曲線Fig.8 Typical braking characteristic curve of electric drive system of mining dump truck

圖9 不同供電電壓下輸出轉矩隨轉速變化曲線Fig.9 Variation curve of output torque with velocity at various voltage supply
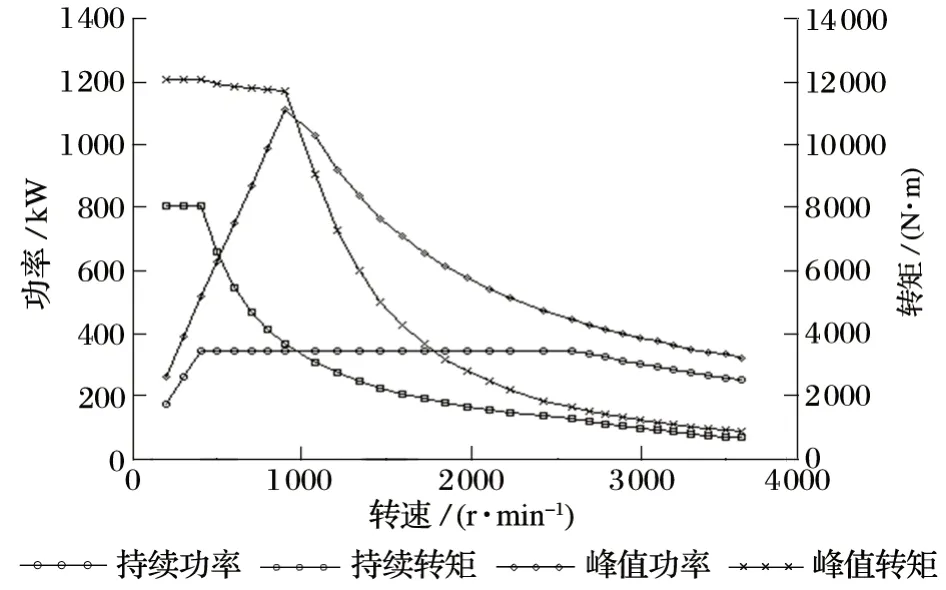
圖10 輸出轉矩、功率變化曲線Fig.10 Variation curve of output torque and power
5 結語
筆者通過對礦用自卸車電傳動系統基本原理進行分析,介紹了一種礦用自卸車電傳動系統組合試驗系統,并對相關標準進行研究分析,結合大量的試驗研究提出了礦用自卸車電傳動系統組合試驗項目。該研究成果已成功應用于多種礦用自卸車電傳動試驗系統,有效驗證了產品的設計參數,保證了產品的質量。隨著礦用自卸車電傳動系統應用數據的積累和研究的深入,對相應的試驗方法、試驗項目的研究也會更加深入。該研究成果在為礦用自卸車電傳動系統組合試驗系統的搭建提供指導的同時,也可為礦用自卸車電傳動系統組合試驗標準的制定提供參考。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
