用于微創外科的線驅動連續型手術機器人設計與仿真研究*
2020-04-24 01:26:20趙智遠朱德勇
機電工程 2020年4期
關鍵詞:手術
趙 亮,趙智遠,朱德勇,劉 闖,李 毅
(1.中國科學院長春光學精密機械與物理研究所 空間機器人工程中心,吉林 長春 130033;2.中國科學院大學 材料科學與光電技術學院,北京 100049)
0 引 言
微創手術是一種可以避免或者減小手術切口,減短傷口愈合時間、減輕患者疼痛以及降低手術感染風險的外科手術方法[1]。手術機器人可以克服一些傳統手術的局限[2]。
按運動結構不同,機器人可分為3類:離散型機器人、蜿蜒型機器人和連續型機器人[3]。離散型機器人難以在復雜環境下連續運動。蜿蜒型機器人難以在狹小空間的手術環境下工作。連續型機器人具有很強的彎曲性能,結構可以很小,可以在非線性狹小空間的手術環境下靈活操作。
美國范德堡大學的SARLI N等[4]研發了一種微創連續型手術機器人系統Turbot,該連續型結構采用單孔三通道方式,內含激光器、內窺鏡、執行器,機器人用Ti-Ni合金驅動,不同溫度下可以有不同的曲率,但該手術機器人負載小、穩定性低;美國卡耐基梅隆大學的TAKEYOSHI O等[5]開發了Cardio arm連續型手術機器人,連續型結構由50個剛性圓柱體構成,具有105個自由度,但其直徑偏大,難以從人體自然腔道進入病灶部位;美國哈佛醫學院的DUPOURQUé L等[6]開發了一種用于肺經支氣管檢查的連續型機器人,由3段連續型關節構成,每個關節由一根方向導線和兩根不銹鋼驅動線組成;英國利茲大學的GARBIN N等[7]研制了一種用于上消化道檢查的便攜式連續型內窺鏡,由形狀記憶合金材料的連續型關節和塑質材料的波紋管執行器組成,并在人體模型中進行了實驗;哈爾濱工業大學的楊文龍等[8]開展了單孔腔鏡的連續型機器人研究,研制的單孔腔鏡長度為245 mm,直徑為10 mm,末端安裝有微型夾持器,但該機器人直徑大,難以進入人體鼻腔、耳道等自然腔道;上海交通大學的徐凱等人[9]開發了一種用于微創手術的連續型手術機器人,可以自由伸縮軸向長度,但同樣用了Ti-Ni合金,負載較小。
本研究將設計一種可以靈活進入狹小非線性空間的線驅動連續型手術機器人。
1 機械系統設計
1.1 UR機械臂選型
本文選擇UR串聯機械臂作為手術機器人系統的第一部分。該串聯機械臂主要分為桌面機器人UR3、靈活型機器人UR5、大型機器人UR10。本文選擇大型機器人UR10。
1.2 并聯平臺設計
在并聯機器人的選擇上,本文采用Gough-Stewart平臺,上平臺和下平臺分別利用6個單腿促動器驅動,每個單腿促動器都由兩邊的十字鉸鏈連接。
1.3 連續型末端執行器設計
連續型末端執行器由兩個模塊組成,并采用分布式彈簧結構,兩個單元體用球關節進行連接,兩個模塊各自都有兩個自由度,整體上采用鋼絲線驅動。
連續型末端執行器機械結構如圖1所示。
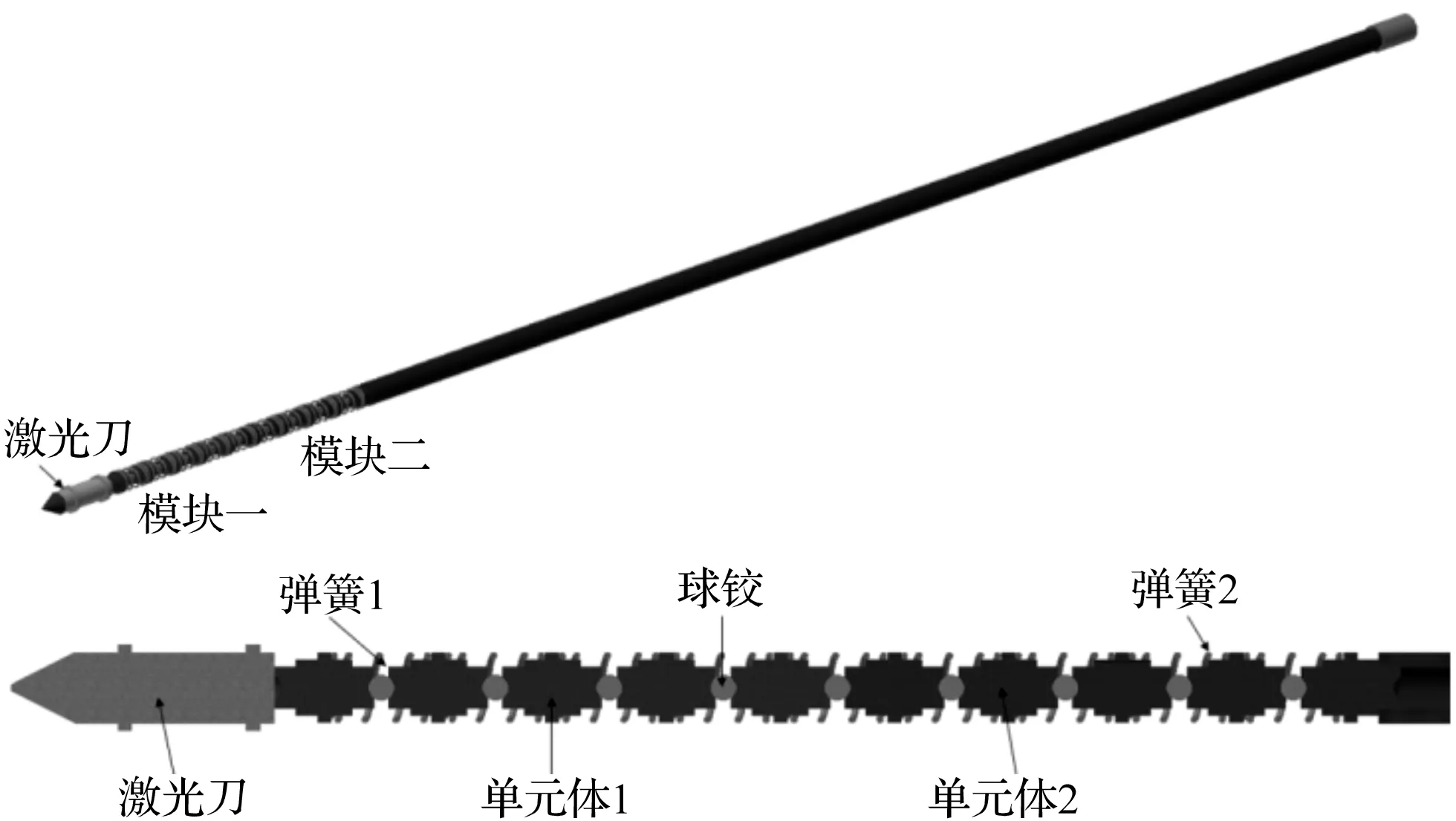
圖1 連續型末端執行器機械結構
其中,模塊1開有4個孔,4個孔中穿入驅動線來驅動模塊1運動;模塊2開有8個孔,其中4個孔用來穿過模塊1的驅動線,另外4個孔用來穿過模塊2的驅動線。整個連續型末端執行器具有4個自由度,最大外徑4 mm,滿足連續型末端執行器進入人體鼻腔、耳道等自然腔道的要求。
本文選擇Maxon motor公司的EC40伺服電機作為動力源,Harmonicdrive公司的諧波減速器CSG-25-100-2A-GR作為減速裝置,用來增加輸出轉矩;利用滾珠絲杠配合驅動線連接裝置改變連續型末端執行器的驅動線長度,從而改變執行器的操作空間位姿。
1.4 力反饋主手選擇
本文選擇Sensable公司的Phantom作為手術機器人系統的觸覺式力反饋手柄,主手裝置中的一個連桿是底座,其他4根桿可以轉動,一共具有6個自由度。醫生操作Phantom裝置的時候其末端關節會發生移動,前3個關節的每一個關節都安裝了交流電機和編碼器,具有記錄角度的功能。
線驅動連續型手術機器人系統模型如圖2所示。
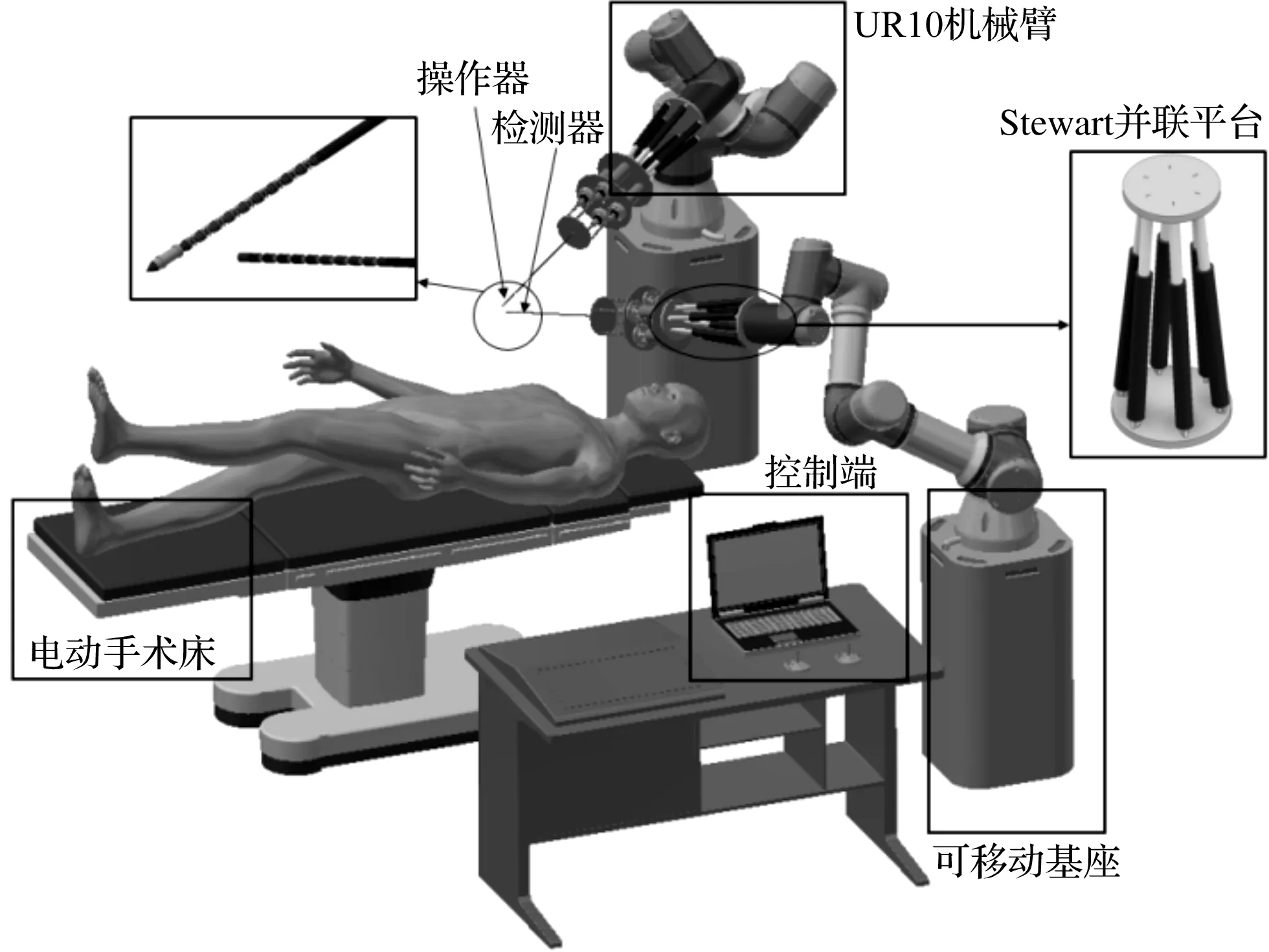
圖2 線驅動連續型手術機器人系統模型
系統由UR10串聯機械臂、Stewart并聯平臺、連續型末端執行器等組成。系統可以和5G技術相結合,實現遠程手術。
2 運動學分析
2.1 串聯機械臂運動學分析
本文利用D-H參數法建立UR機械臂的運動學模型,建立機械臂的連桿坐標系,求得連桿1對原始連桿的變換矩陣表達式為:
(1)
式中:l—連桿長度;φ—連桿轉角;d—連桿偏距;θ—關節角。
則機械臂的末端坐標系相對于原始坐標系的齊次變換矩陣是:
(2)
2.2 連續型末端執行器運動學分析
為了得到連續型末端執行器的單個關節段的運動學模型[10-11],本文在其第一個關節段的基座圓盤中心點處建立基坐標系OXYZ,在其末端設立末端坐標系O1X1Y1Z1。
末端執行器單關節段運動學模型如圖3所示。
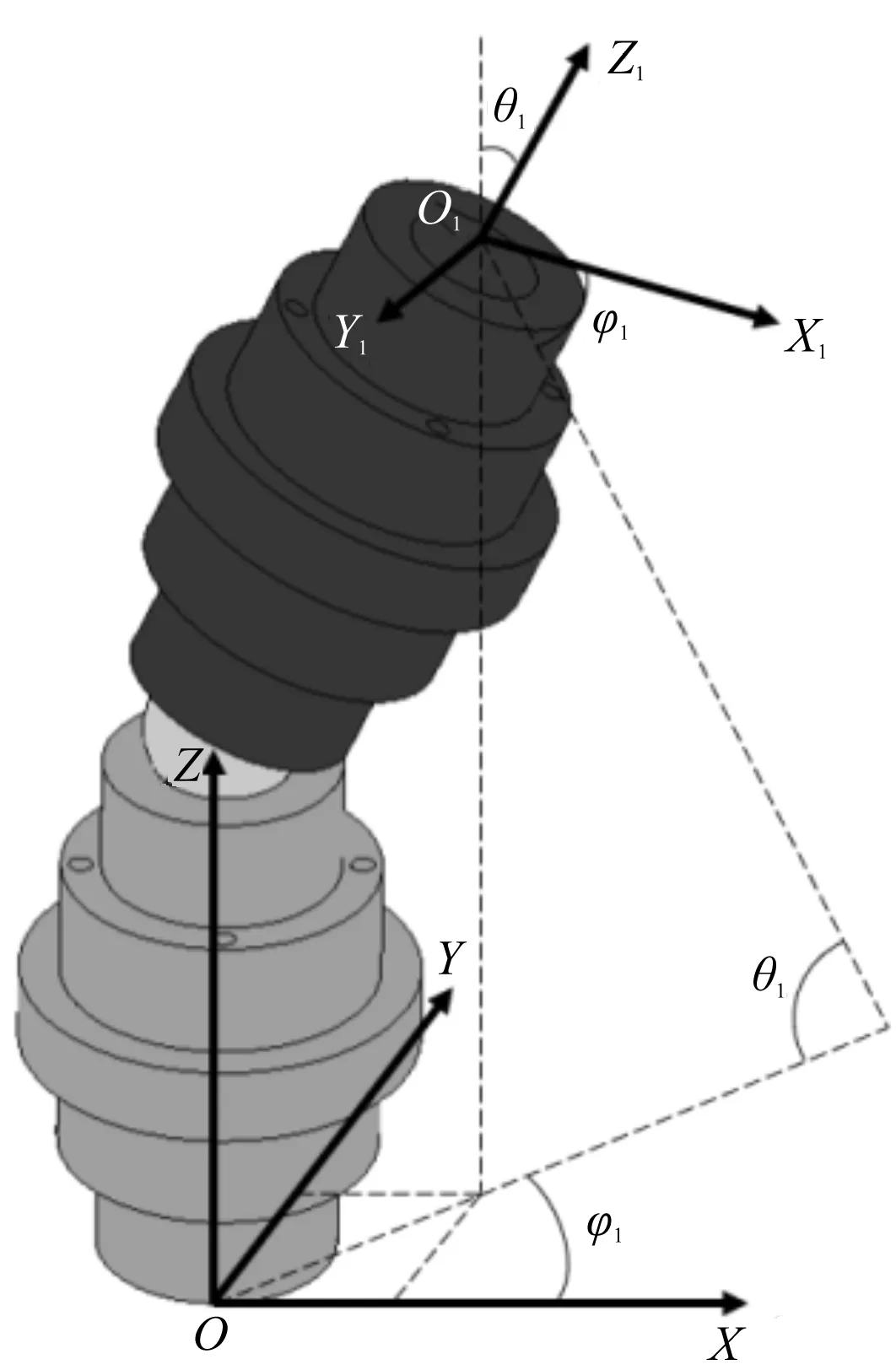
圖3 單關節段運動學模型
首先原始坐標系OXYZ沿3個方向進行平移,其中,坐標系的O點移動到O1點,平移矩陣是:
(3)
再進行旋轉變換,得到齊次變換矩陣的表達式是:
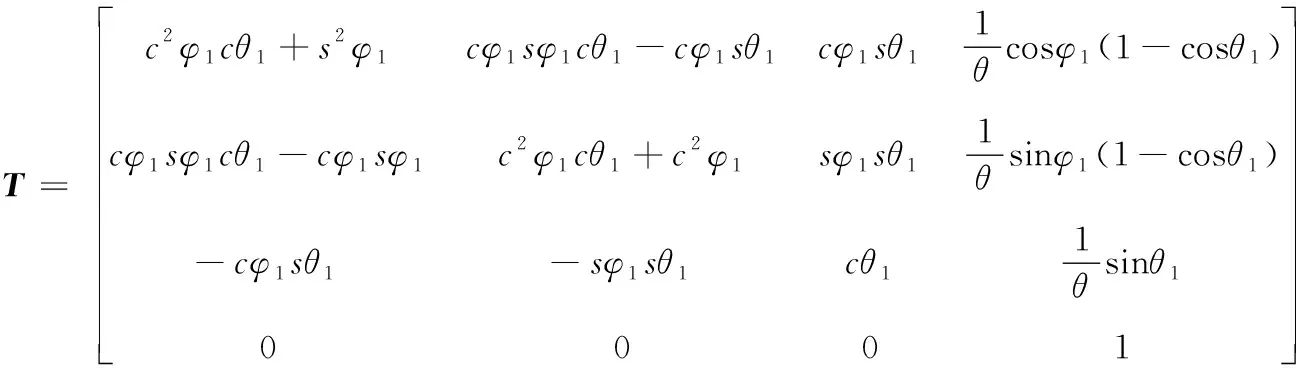
(4)
式中:φ1—坐標系繞Z軸旋轉角度;θ1—坐標系繞Y軸旋轉角度;-φ1—坐標系繞新的Z軸旋轉角度;l—單關節段的長度。
逆運動學分析是根據執行器操作空間中的末端位姿計算關節空間中的關節變量。其矩陣表達式如下:
(5)
式中:R1—末端坐標系相對于原始坐標系的旋轉矩陣;P1—末端坐標系在原始坐標系中的位置坐標;n,o,a—末端坐標系中3個坐標軸的單位矢量。
已知末端位姿,聯立式(3,4),可求得對應的關節變量參數是:
θ1=arccos(az)
(6)
(7)
機器人彎曲時,單關節段驅動線模型如圖4所示。
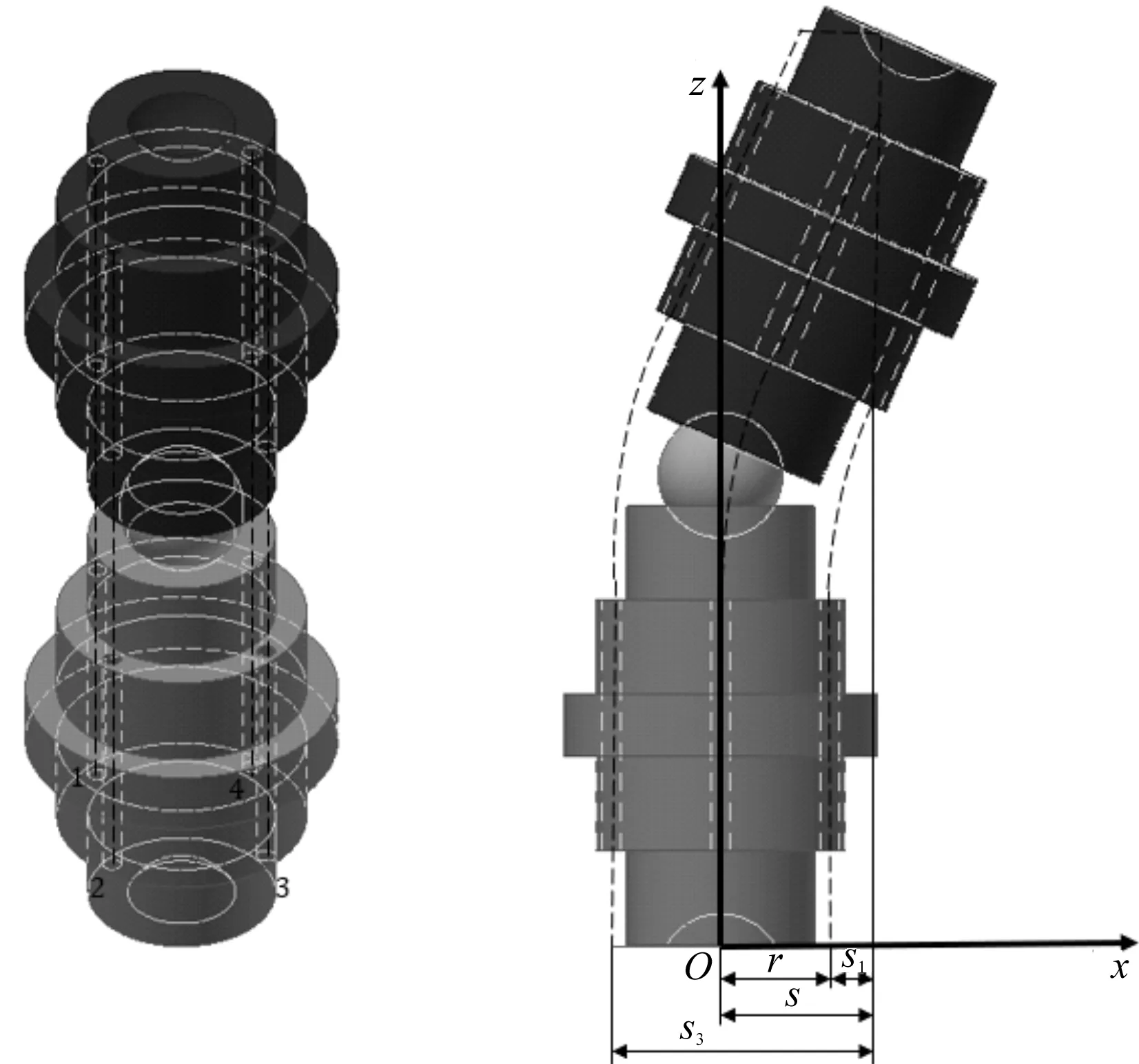
圖4 單關節段驅動線模型
根據幾何關系,可以得到連續型末端執行器單關節段驅動線的長度是:
(8)
式中:s1(i=1,…,4)—連續型末端執行器單關節段彎曲角度為θ1時的各個驅動線的彎曲曲率半徑;s—連續型末端執行器單關節段軸線中心的彎曲曲率半徑;r—圓盤基座上的孔和軸中心線之間的距離。
按照幾何關系,所得的連續型末端執行器單關節段中的驅動線長度的變化量為:
(9)
為了驗證相關運動學計算的正確與否,本文利用Matlab對運動學進行仿真,在驅動空間中輸入4組不同驅動線長度變化量的數值,其變化量如表1所示。

表1 驅動線長度變化量
連續型末端執行器彎曲運動仿真如圖5所示。
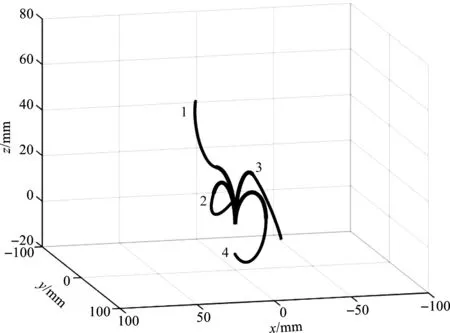
圖5 連續型末端執行器彎曲運動仿真圖
從圖5可以看出:通過改變驅動線長度,就可以實現連續型末端執行器的靈活運動。該結果驗證了本文運動學模型的正確性。
3 末端執行器工作空間分析
機器人的可達工作空間[12]是由機器人的幾何形狀和關節運動的限位決定的。機器人的工作空間是評價機器人工作能力的重要指標[13]。
一般機器人工作空間求解方法有:幾何法、解析法和數值法[14]。本文采用數值法中的蒙特卡羅法計算連續型末端執行器工作空間[15]。首先筆者利用蒙特卡羅法取得連續型末端執行器關節組合,然后把機器人關節組合引入正向運動學計算中,得到機器人末端執行器在空間坐標系中的空間位置矢量,最后把位置矢量可視化,得到機器人工作空間[16]。具體步驟如下:
(1)利用數值隨機函數來產生機器人空間關節變量的偽隨機數;
(2)把取得的機器人空間關節變量值帶入機器人正向運動學方程中,計算機器人末端的空間位置矢量;
(3)利用Matlab軟件把第二步計算的機器人末端空間位置矢量可視化,所得就是機器人工作空間。
對于連續型末端執行器的正向運動學分析,首先利用蒙特卡羅法計算單關節段末端執行器的工作空間,再利用蒙特卡羅法對兩關節段的末端執行器可達工作空間進行仿真;將計算的單關節段和兩關節段工作空間放在同一個三維坐標系中,沿平面截開,可得到執行器可達工作空間,如圖6所示。
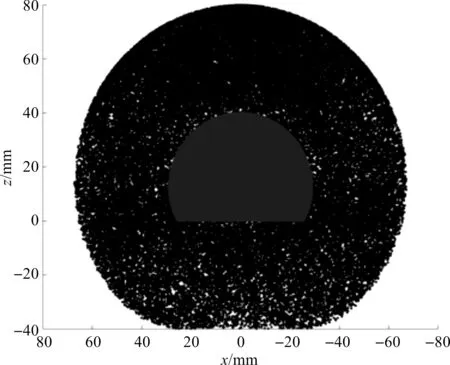
圖6 連續型末端執行器可達工作空間對比圖
圖6中,小的橢圓體是單關節段工作空間,大的橢圓體是雙關節段工作空間。
4 結束語
面對狹小非線性手術環境的需求,本文設計了一種用于微創外科的線驅動連續型手術機器人系統。首先在Inventor軟件中建立了連續型手術機器人系統的三維模型,然后對手術機器人進行了正向運動學和逆向運動學分析,并在Matlab中進行了仿真,最后利用蒙特卡羅法進行連續型末端執行器工作空間的計算。
仿真結果表明:連續型末端執行器可以靈活地彎曲,可達工作空間范圍[-40,80],最遠距離120 mm,符合狹小非線性手術要求。
參考文獻(References):
[1] 王建辰.變剛度單孔手術機器人系統設計方法及主從控制策略研究[D].天津:天津大學機械工程學院,2017.
[2] 鄭先鋒.單通道蛇形手機機器人的開發及研究[D].西安:西安電子科技大學機電工程學院,2015.
[3] ROBINSON G, DAVIES J B C. Continuum robots-a state of the art[C]. IEEE International Conference on Robotics and Automation,Michigan: IEEE,1999.
[4] SARLI N, SIMAAN N. Minimal visual occlusion redundancy resolution of continuum robots in confined spaces[C].IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver: IEEE, 2017.
[5] TAKEYOSHI O, HOWIE C. A highly articulated robotic surgical system for minimally invasive surgery[J]. The Society of Thoracic Surgeons, 2009,87(4):1253-1256.
[6] DUPOURQUé L, MASAKI F, COLSON L Y, et al. Transbronchial biopsy catheter enhanced by a multi-section continuum robot with follow-the-leader motion[J]. International Journal of Computer Assisted Radiology and Surgery, 2019(9):1-9.
[7] GARBIN N, WANG L, CHANDLER H J, et al. Dual continuum design approach for intuitive and low cost upper gastrointestinal endoscopy[J]. IEEE Transactions on Biomedical Engineering, 2019,66(7):1963-1973.
[8] 楊文龍.面向單孔腔鏡手術的連續型機械臂及其運動建模的研究[D].哈爾濱:哈爾濱工業大學機電工程學院,2016.
[9] SHUAN Z, QI L, XU K, et al. Configuration transition control of a continuum surgical manipulator for improved kinematic performance[J]. IEEE Robotics and Automation Letters, 2019,4(4):3750-3757.
[10] CRAIG J. Introduction to robotics: mechanics and control[M]. 3th ed. New York: Person Education, 2005.
[11] 陳光明,黃 旋.基于高壓水射流的船體清洗機器人關鍵技術分析[J].流體機械,2019,47(9):56-62.
[12] 劉海濤,楊樂平,朱彥偉,等.空間機器人工作空間研究[J].組合機床與自動化加工技術,2011(8):26-29.
[13] 李保豐,孫漢旭,賈慶軒,等.基于蒙特卡洛法的空間機器人工作空間計算[J].航天器工程,2011,20(4):79-85.
[14] BOHIGAS O,MANUBENS M,ROS L. Complete method for workspace boundary determination[J]. IEEE Transaction on Robotics, 2012,28(5):993-1006.
[15] CAO Y, LU K, LI X. Accurate numerical methods for computing 2D and 3D robot workspace[J]. International Journal of Advanced Robotic Systems, 2011,8(6):1-13.
[16] 田海波,馬宏偉,魏 娟,等.串聯機器人機械臂工作空間與結構參數研究[J].農業機械學報.2013,44(4):196-201.
猜你喜歡
環球時報(2022-12-23)2022-12-23 09:28:37
昆明醫科大學學報(2022年1期)2022-02-28 07:45:04
中老年保健(2021年11期)2021-08-22 03:13:36
昆明醫科大學學報(2021年2期)2021-03-29 07:42:46
河北畫報(2020年10期)2020-11-26 07:20:50
小學閱讀指南·低年級版(2017年1期)2017-03-13 20:07:35
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
中國醫療美容(2015年1期)2015-07-12 10:06:38
鄭州大學學報(醫學版)(2015年2期)2015-02-27 14:50:54
西南軍醫(2014年5期)2014-04-25 07:42:48