三冗余測(cè)量技術(shù)在勵(lì)磁系統(tǒng)中的應(yīng)用
2020-04-24 03:25:08付本全朱慧明肖雅麗
冶金動(dòng)力 2020年2期
付本全,朱慧明,肖雅麗,曹 銳
(1大冶有色金屬有限責(zé)任公司銅山口銅礦,湖北黃石 435122;2武漢科大電控設(shè)備有限公司,湖北武漢 430081)
引言
在現(xiàn)代工業(yè)飛速發(fā)展的進(jìn)程中,一些生產(chǎn)機(jī)械要求的功率越來(lái)越大,如送風(fēng)機(jī)等,同步電動(dòng)機(jī)拖動(dòng)比異步電動(dòng)機(jī)拖動(dòng)更為適合[1]。隨著異步電動(dòng)機(jī)的同步轉(zhuǎn)速下降,其功率因數(shù)將明顯下降,而隨著同步電動(dòng)機(jī)容量的增大其勵(lì)磁裝置的造價(jià)占總價(jià)格的百分比也明顯下降,因此在容量大、轉(zhuǎn)速低的工業(yè)機(jī)械中采用同步電動(dòng)機(jī)的優(yōu)勢(shì)顯而易見(jiàn)[2]。同步電動(dòng)機(jī)運(yùn)行方式靈活,既能運(yùn)行于越前功率因數(shù),又能運(yùn)行于滯后功率因數(shù),可按企業(yè)的最佳運(yùn)行方式運(yùn)行,在空載時(shí)也有明顯的節(jié)能效果[2]。同步電動(dòng)機(jī)運(yùn)行過(guò)程中,如果勵(lì)磁系統(tǒng)的參數(shù)不準(zhǔn)確,勵(lì)磁電流降低,可能就會(huì)造成同步電動(dòng)機(jī)的過(guò)載能力不足,使得驅(qū)動(dòng)轉(zhuǎn)矩小于負(fù)荷制動(dòng)轉(zhuǎn)矩,進(jìn)入欠勵(lì)失步狀態(tài)[3]。因此勵(lì)磁系統(tǒng)參數(shù)的準(zhǔn)確性就直接影響到了電動(dòng)機(jī)的穩(wěn)定運(yùn)行。
目前對(duì)于勵(lì)磁系統(tǒng)的測(cè)量,是根據(jù)電機(jī)滿載或重載啟動(dòng)、全壓或降壓?jiǎn)?dòng)的狀態(tài),采用對(duì)轉(zhuǎn)子回路感應(yīng)電壓電流的高速測(cè)量,通過(guò)高速光耦輸入給PLC。但是在測(cè)量勵(lì)磁電流電壓時(shí)很可能由于測(cè)量電路本身產(chǎn)生的故障導(dǎo)致數(shù)據(jù)不準(zhǔn)確,不能保證電動(dòng)機(jī)的穩(wěn)定運(yùn)行[4]。因此我們應(yīng)該盡量避免測(cè)量系統(tǒng)自身誤差對(duì)輸出數(shù)據(jù)的影響。
三冗余測(cè)量技術(shù)的核心是三模冗余(Triple Modular Redundancy),簡(jiǎn)稱TMR。三模冗余是一種常用的硬件容錯(cuò)技術(shù),對(duì)現(xiàn)場(chǎng)中同一點(diǎn)的數(shù)據(jù)使用多個(gè)相同的模塊分別獨(dú)立采集,表決系統(tǒng)對(duì)采集到的多路數(shù)據(jù)采用三選二表決模式進(jìn)行分析表決,輸出正確的數(shù)據(jù)[5]。由于模塊之間是相互獨(dú)立的,兩個(gè)模塊同時(shí)產(chǎn)生故障的概率極小,容錯(cuò)性能更高。所以勵(lì)磁系統(tǒng)的參數(shù)測(cè)量運(yùn)用三冗余測(cè)量技術(shù),可以大大提高測(cè)量的可靠性[6]。
1 基本原理
三冗余測(cè)量技術(shù)的特點(diǎn)為軟硬件結(jié)合,硬件冗余,軟件判斷共同實(shí)現(xiàn)三模冗余。如圖1所示,圖中的輸入A、B、C 為硬件冗余測(cè)量部分,表決器、處理a、處理b、處理c和輸出為軟件判斷輸出部分。硬件部分負(fù)責(zé)勵(lì)磁系統(tǒng)中各項(xiàng)參數(shù)的采樣,主要以傳感器和運(yùn)算放大電路為基礎(chǔ)對(duì)模擬信號(hào)進(jìn)行采樣并送入DSP 的A/D 轉(zhuǎn)換口,每項(xiàng)參數(shù)均有三組相同的采樣電路獨(dú)立進(jìn)行采樣,軟件部分由DSP 負(fù)責(zé)分析處理多路信號(hào),以三選二表決方式輸出三組數(shù)據(jù)中最接近的兩組數(shù)據(jù)的平均值。本方案采用Microchip 公司的高性能16 位數(shù)字信號(hào)控制器dsPIC30F4011,該DSP具有運(yùn)算高速的性能,能夠?qū)y(cè)量電路采集的模擬信號(hào)快速地做出響應(yīng),同時(shí)完成A/D轉(zhuǎn)換等數(shù)據(jù)處理與通信功能[7]。
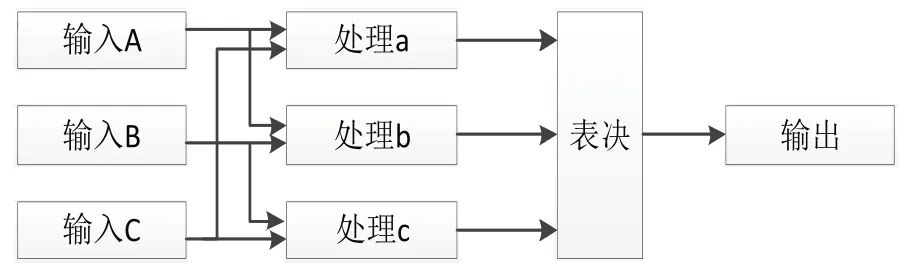
圖1 三冗余測(cè)量的基本原理圖
2 總體結(jié)構(gòu)
如圖2所示,三冗余測(cè)量整體表現(xiàn)為四個(gè)模塊,分別是電源模塊、信號(hào)采集模塊、信號(hào)處理表決模塊和輸出模塊。下面分別介紹各個(gè)模塊。
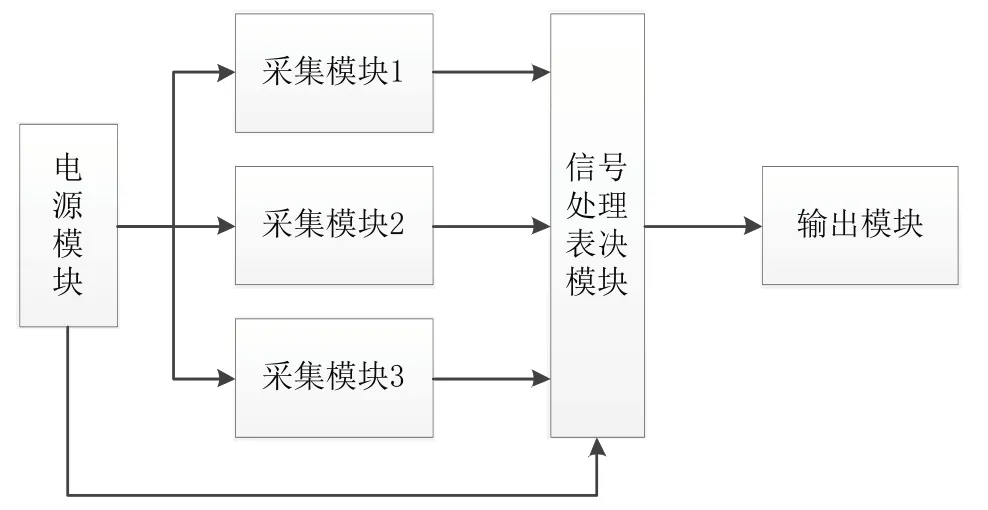
圖2 三冗余測(cè)量結(jié)構(gòu)圖
2.1 電源模塊
如圖3 所示,電源模塊利用WRB 系列將接入的+24 V 電源轉(zhuǎn)化成+E1,-E1,+E2,-E2和E3的電源為各部分供電。其中E1 和E2 均為15 V,E3 為5 V。+E1 和-E1 為光耦隔離芯片TIL300 左邊的電路供電,+E2 和-E2 為隔離芯片右邊的電路供電。E3 為數(shù)字信號(hào)控制器dsPIC30F4011 供電。電路中電容的作用是濾波,將得到更準(zhǔn)確的電壓值。
2.2 信號(hào)采集模塊
該模塊由電流、電壓、功率因數(shù)的采集電路組成。因?yàn)檗D(zhuǎn)子繞組通以勵(lì)磁電流產(chǎn)生轉(zhuǎn)子旋轉(zhuǎn)磁勢(shì)和磁場(chǎng),從而使電動(dòng)機(jī)達(dá)到同步。本文以勵(lì)磁電流采集電路為例詳細(xì)介紹。因?yàn)閷y(cè)量電路串聯(lián)進(jìn)勵(lì)磁電路中工序復(fù)雜,也可能對(duì)勵(lì)磁電路產(chǎn)生影響,而且勵(lì)磁電流一般在0~500 A范圍內(nèi),很難直接采集。如果采用傳感器采集方式,那么整個(gè)系統(tǒng)需要三個(gè)直流電流傳感器,這樣不僅增加了設(shè)備成本也提高了系統(tǒng)的復(fù)雜程度。考慮到勵(lì)磁系統(tǒng)中勵(lì)磁電流多采用分流器分流后配合電流表使用,所以本設(shè)計(jì)對(duì)于勵(lì)磁電流的采集信號(hào)采用分流器輸出的0~75 mV 的模擬量信號(hào)。如圖4 所示,P1 外接分流器,勵(lì)磁電流經(jīng)過(guò)分流器將0~500 A 的電流變?yōu)?~75 mV 的電壓信號(hào)。P1 的1 號(hào)口接分流器輸出負(fù)極,2 號(hào)口接正極。電壓輸入之后,接一個(gè)隔離電路,防止勵(lì)磁電路中出現(xiàn)故障產(chǎn)生大電壓燒壞電路板。隔離采用TIL300 線性光耦隔離芯片,前接反饋電路將接收的信號(hào)反饋給運(yùn)算放大器進(jìn)行調(diào)節(jié),能夠在一定程度上避免模擬信號(hào)失真。
上述采樣電路的阻抗很大,微處理器AD 的阻抗很小,此時(shí)就需要有阻抗變換作用的電壓跟隨器。如圖5 所示,電壓跟隨器的輸出電壓與輸入電壓的相位和大小基本相同,能夠作起到緩沖和隔離的作用。
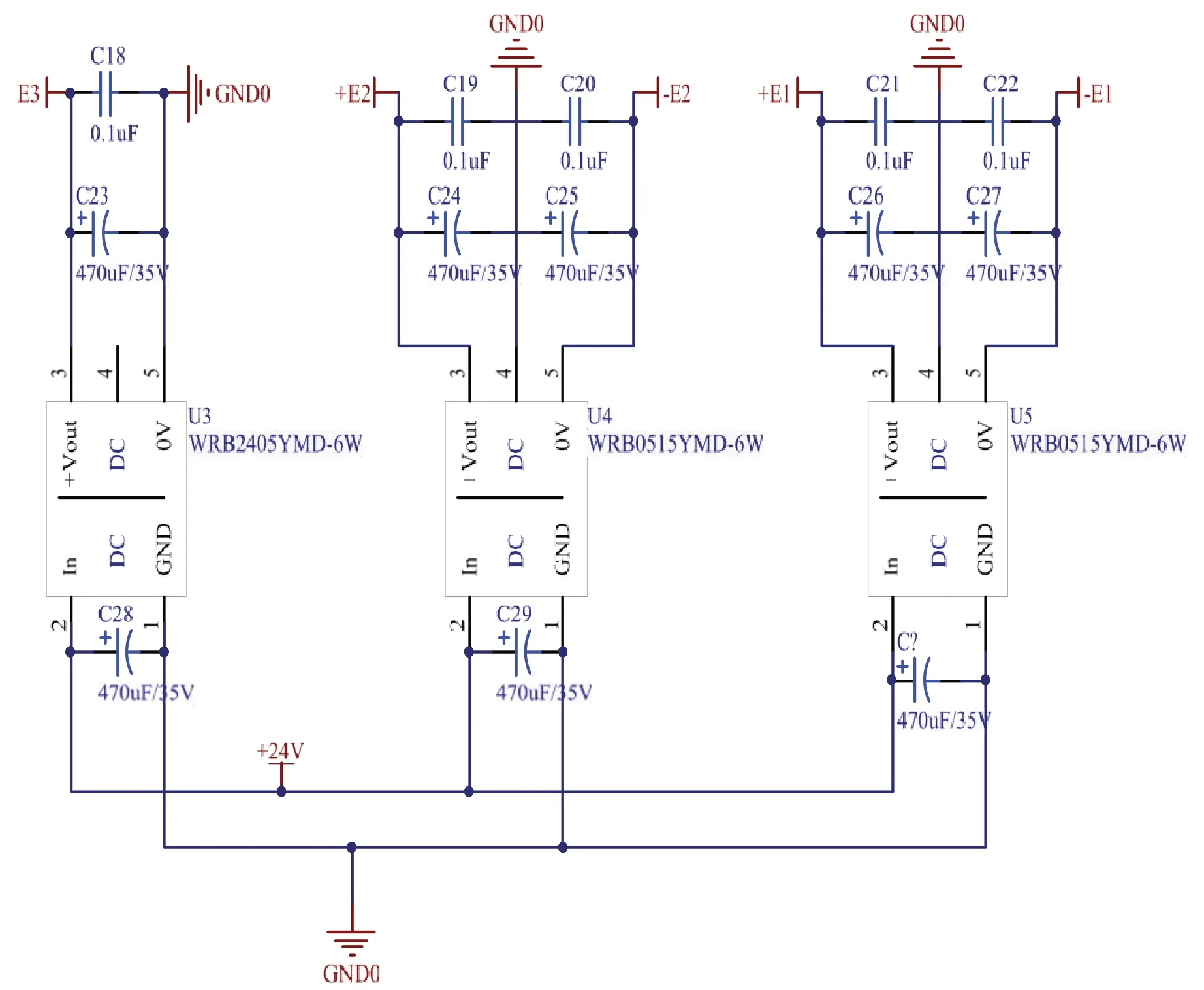
圖3 電源電路圖

圖4 勵(lì)磁電流采樣電路圖
由于微處理器4011 的A/D 轉(zhuǎn)換口能夠接收的電壓范圍為0~2.5 V。而經(jīng)過(guò)上述電路變換后,勵(lì)磁電流采集信號(hào)的電壓值最大值在75 mV,電壓達(dá)不到微處理器的要求,所以需要通過(guò)放大電路對(duì)電壓進(jìn)行調(diào)整。如圖6 所示,該電路的放大倍數(shù)計(jì)算公式為AV=1+R6/R7,R9為平衡電阻,用于減小輸入電流失調(diào)R9=R7·R6/(R7+R6)。
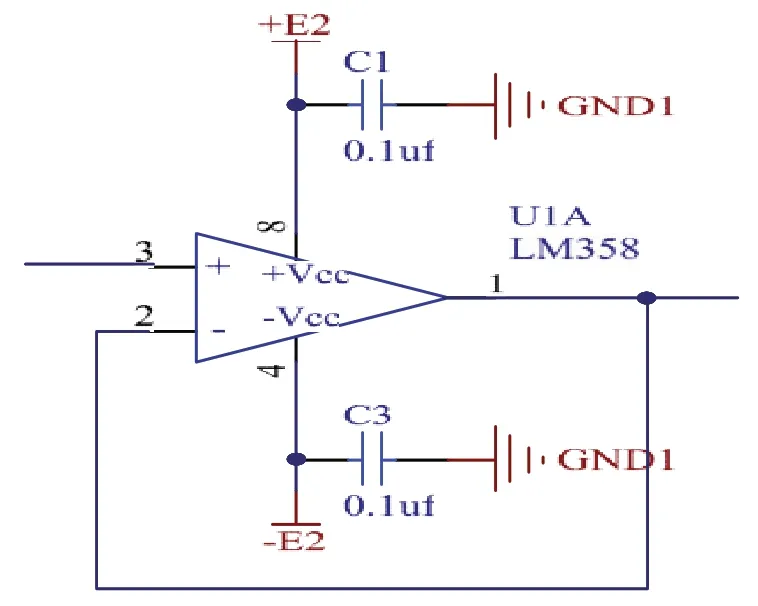
圖5 電壓跟隨電路圖

圖6 同相放大電路圖
圖7 為保護(hù)電路,如果電路輸出的電壓太大可能會(huì)損壞微處理器,在模擬電壓進(jìn)微處理器的AD口之前需要進(jìn)行保護(hù)。
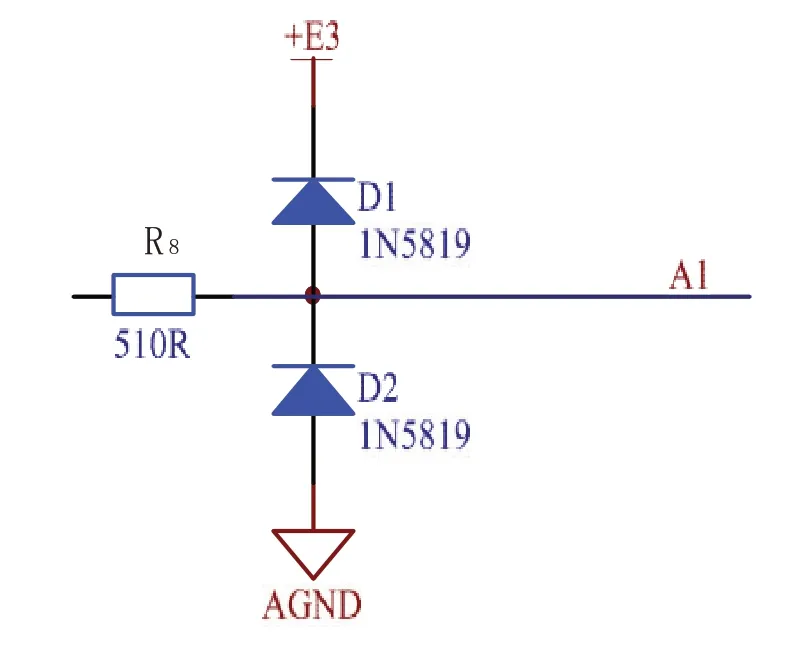
圖7 保護(hù)電路圖
2.3 信號(hào)處理表決模塊
信號(hào)處理表決模塊由數(shù)字信號(hào)控制器dsPIC30F4011 及其最小系統(tǒng)電路組成。信號(hào)采集模塊將模擬信號(hào)送入A/D 轉(zhuǎn)換口后,由DSP 運(yùn)行程序?qū)⒛M量轉(zhuǎn)換成數(shù)字量,并進(jìn)行分析比較,輸出最終的正確信號(hào)。如圖8 所示,DSP 的最小系統(tǒng)電路中,VDD 接5 V 電源,VSS 接地,電源與地之間有濾波電容連接。晶振電路系統(tǒng)提供時(shí)鐘信號(hào),以保證各部分同步。另外還有三路電流采樣信號(hào)A1,A2,A3輸入微處理器的A/D轉(zhuǎn)換口。
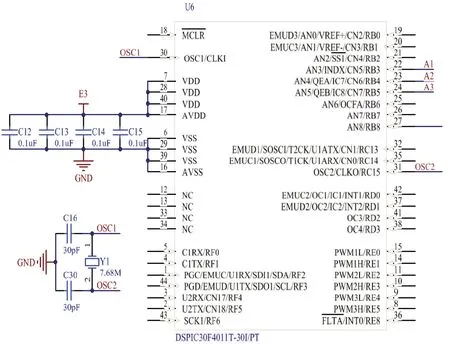
圖8 DSP外圍電路圖
2.4 輸出模塊
如圖9 所示,正常情況下DSP 輸出的信號(hào)為高電平,LED 燈不導(dǎo)通,當(dāng)測(cè)量數(shù)據(jù)偏離正常值時(shí),信號(hào)輸出為低電平,LED導(dǎo)通,信號(hào)燈亮。

圖9 信號(hào)燈電路圖
3 表決機(jī)制
如圖10 所示,當(dāng)采集電路將采集的三路信號(hào)A、B、C 送入DSP 后首先進(jìn)行數(shù)據(jù)處理,將三組數(shù)據(jù)兩兩做減法得到處理結(jié)果a、b、c,然后進(jìn)行表決,選取a、b、c 中絕對(duì)值最小的值,算出該值所對(duì)應(yīng)的兩組數(shù)據(jù)的平均值s 與正常值的最小值x、最大值y 進(jìn)行比較,在其范圍內(nèi)則正常輸出顯示,不在其范圍內(nèi)則報(bào)警。
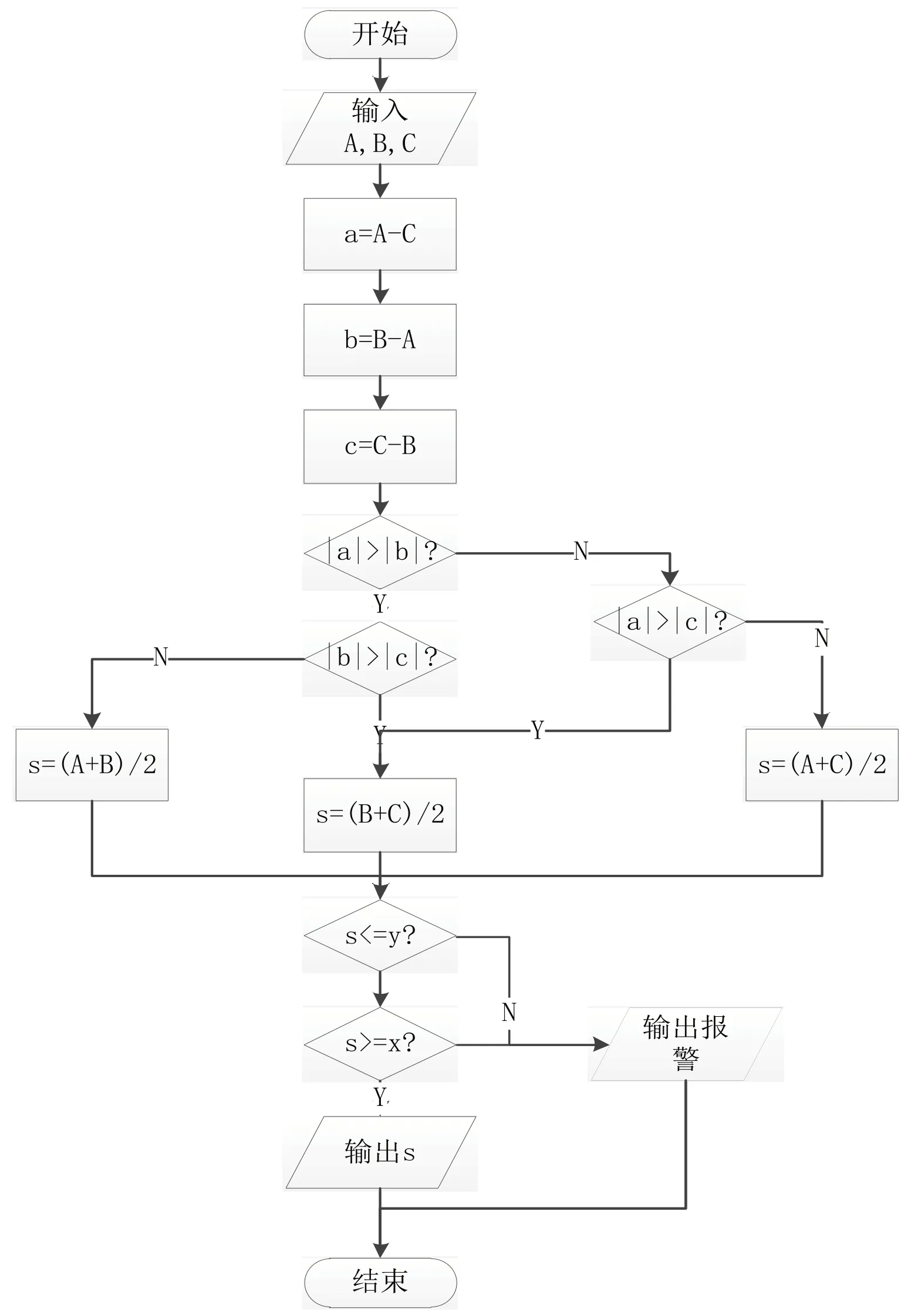
圖10 表決流程圖
4 結(jié)語(yǔ)
三冗余測(cè)量技術(shù)將硬件冗余與軟件判斷相結(jié)合,使測(cè)量結(jié)果更為準(zhǔn)確。硬件部分利用三個(gè)相同的測(cè)量電路進(jìn)行冗余,軟件部分采用DSP 對(duì)三路數(shù)據(jù)進(jìn)行分析處理和判斷,最后根據(jù)判斷結(jié)果輸出不同的信號(hào)。硬件上的冗余對(duì)同一點(diǎn)的數(shù)據(jù)獨(dú)立采樣了三次,兩個(gè)采樣電路同時(shí)出現(xiàn)錯(cuò)誤是極小概率事件幾乎可以忽略。此時(shí)DSP 根據(jù)三組數(shù)據(jù)判斷產(chǎn)生的結(jié)果遠(yuǎn)比單組數(shù)據(jù)產(chǎn)生的結(jié)果準(zhǔn)確,也可以更大程度的避免因測(cè)量電路故障而引起的不必要報(bào)警,容錯(cuò)性能更好。因此,將該技術(shù)運(yùn)用到對(duì)勵(lì)磁系統(tǒng)的電流、電壓、功率因數(shù)等重要參數(shù)的測(cè)量中可以更好地保證勵(lì)磁系統(tǒng)參數(shù)測(cè)量的可靠性,使得運(yùn)行人員能夠更加準(zhǔn)確的判斷勵(lì)磁系統(tǒng)的狀態(tài),對(duì)維持同步電動(dòng)機(jī)的穩(wěn)定運(yùn)行具有很好的促進(jìn)作用,安全性能更高,適應(yīng)科技發(fā)展的軌跡,有很好的發(fā)展前景。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45