播種單體對地下壓力測量方法和數學模型
2020-04-24 08:27:20高原源翟長遠趙學觀趙春江
農業工程學報 2020年5期
高原源,翟長遠,楊 碩,趙學觀,王 秀,3,趙春江
·農業裝備工程與機械化·
播種單體對地下壓力測量方法和數學模型
高原源1,2,翟長遠2,楊 碩1,2,趙學觀2,王 秀2,3,趙春江1,3※
(1. 中國農業大學信息與電氣工程學院,北京 100083;2. 北京農業智能裝備技術研究中心,北京 100097;3. 國家農業信息化工程技術研究中心,北京 100097)
對播種下壓力實時測量是精準控制的基礎,為了提高現有測量方法的通用性、準確性和穩定性,該研究在對播種下壓力和播種深度關系模型分析基礎上,采用軸銷傳感器播種下壓力測量方法,進行了傳感器力學分析和設計選型方法研究,并針對不同播深設定下單一測量模型誤差大的問題,建立了融合播種深度因素的播種下壓力測量修正模型,模型決定系數(2)為0.991 6,均方根誤差(root mean square error,RMSE)為28.88 N,驗證試驗表明,不同播深設定下,模型預測誤差絕對值最大為44.13 N,最大相對預測誤差為3.28%,提高了播種下壓力測量模型通用性和準確性。播種下壓力田間動態變化分析試驗結果表明,在4~8 km/h車速下,播種下壓力振蕩主頻幅值隨車速增加而減小,且免耕處理下主頻幅值和功率譜密度(power spectral density,PSD)峰值均大于旋耕處理。不同車速和耕作方式下,播種下壓力振蕩主頻變化較小,主要集中在0~1 Hz,為后續信號穩定輸出的濾波處理提供依據。該研究結果可為播種下壓力的精準控制奠定基礎。
機械化;傳感器;播種機;播種下壓力;播種深度;數學模型;軸銷傳感器
0 引 言
均勻的播種粒距、穩定一致的播種深度和適宜的播種下壓力是當前精密播種作業研究的主要目標[1],其中對播種下壓力的有效控制不僅可以獲得適宜的種溝壓實環境[2],還可以實現播種單體作業減振的目的[3],對于提高落種質量,保證粒距均勻和播深穩定具有重要作用[4]。已有研究表明,適宜的播種下壓力有利于提高播深一致性,促進幼苗根系發育[5-6],提高作物產量[7-8]。為實現播種作業“提質增效”[9],有必要加強對播種下壓力監控的研究,特別是播種下壓力測量方式和控制方法的研究。
在播種下壓力控制方面,根據驅動方式主要分為主動式和被動式,其中被動式主要依靠仿形機構上機械彈簧以實現下壓力隨地被動調節[10-12],由于地形起伏或土壤變化,被動式常出現下壓力調節不穩定現象。為提高播種質量,主動下壓力控制方式被提出,將彈簧替換為液壓或氣壓驅動裝置,以實現驅動部件的主動調節。如文獻[13-17]采用液壓驅動仿形機構的方式來改變播種下壓力和開溝深度,文獻[18-28]采用氣壓驅動方式調節單體對地下壓力。主動控制方式的提出催生了下壓力實時測量的需求,而目前相關研究尚少。在測量方式選擇上,由于單體限深輪直接接觸并壓實土壤,其對地壓力可以直接反映播種下壓力,已成為學者測量下壓力的主要方式。文獻[21]在限深輪胎面內安裝壓電薄膜以檢測限深輪形變,進而獲得對地下壓力,李玉環等[22]采用壓力傳感器檢測單體后仿形輪鎮壓力大小。針對壓電傳感器和后仿形方式帶來的可靠性不高和檢測滯后[23]問題,為提高技術通用性,文獻[24-25]通過替換限深塊銷軸為軸銷傳感器,以測量同位限深輪對地下壓力。前期研究發現,作業過程中限深塊的沖擊和振動會造成傳感器輸出信號的不穩定,且不同播種深度下,基于傳感器檢測值的單一測量模型誤差較大。
測量的準確性是精準控制的基礎,對播種下壓力測量方式選擇上,應首先保證其通用性和準確性。本文采用通用性較好的軸銷傳感器下壓力測量方法,分析播種下壓力和播種深度之間關系模型,進行傳感器力學分析和設計選型研究,建立融合播種深度的播種下壓力測量修正模型。進一步通過田間試驗對播種下壓力信號進行頻譜分析,實現后續信號處理和控制。
1 試驗裝置與方法
試驗裝置選用河北中友機電設備有限公司生產的2BFQ-6氣力精密播種機,其用于玉米或大豆的精密播種,作業幅寬為3.0~4.2 m。
1.1 力學分析
如圖1所示,限深輪通過限深臂鉸接在播種單體機架上,田間作業過程中,限深輪隨地表起伏或土壤阻力變化而發生上下振動。忽略鉸接處摩擦力對限深輪運動影響,根據限深輪轉動過程中力矩平衡和剛體平衡軸定理,推導出運動方程為

注:為除限深輪和限深臂外單體質量,kg;F、F分別為地面對限深輪水平阻力和垂直作用力,N;L為限深臂長度,m;1為限深塊對限深臂作用力,N;1為1力臂長度,m;m、m分別為限深輪和限深臂質量,kg;為限深臂與單體架夾角,(°);為重力加速度,m·s-2;R為限深輪半徑,m;為限深輪對地下壓深度,m;為播種深度,mm。
Note:is mass of the row unit (except the mass of gauge wheel and limit shank), kg;FandFrespectively represents the horizontal resistance and vertical force of ground to gauge wheel, N;Lis length of limit shank, m;1is the force of limit block to limit shank, N;1is the length of1action point to hinge point, m;mandmare mass of gauge wheel and limit shank respectively, kg;is angle between limit shank and unit frame, (°);is the acceleration of gravity, m·s-2;Ris radius of gauge wheel, m;is the deformation of ground and gauge wheel, m;is the sowing depth, mm.
圖1 限深輪受力分析
Fig.1 Force analysis of gauge wheel
由式(1)知,在其他變量已知的前提下,通過限深臂角度和限深塊對限深臂作用力1,可以獲得限深輪對地作用力F。進一步,假設作業地塊地表隨時間變化可用1=1()表示,則限深輪深度變化可表示為地表變化與限深輪質心變化差值,即
由于限深輪與地面接觸,其深度變化不能為負,對式(2)而言,當其計算值為負時,默認為0。對其進行微分可得
對式(3)換算可得
聯立式(1)、(4)即為限深輪運動模型。由模型可以看出,播種作業時,地表起伏變化會帶來限深輪深度的改變,另一方面,由文獻[26]可知,作業地塊土壤物化特性變化同樣會造成播種單體開溝深度的變化,改變單體對地下壓力的大小。為此加強對播種下壓力的監測不僅有助于實現對土壤壓實力的控制,提高單體開溝質量,而且可以一定程度上反映播種深度的變化。
1.2 測量方法
由式(1)可知,播種下壓力(即地面對限深輪垂直作用力F)大小與限深塊對限深臂作用力1有關,如圖2所示,本研究替換已有限深塊擺動銷軸為軸銷傳感器,通過監測軸銷傳感器在豎直方向作用力來獲得限深輪處播種下壓力,具體方法已在文獻[25]中進行描述,本文不再重新敘述。根據圖中受力矢量圖可知
式中1為限深臂對限深塊反作用力,N;2為播深調節結構對限深塊作用力,N;3為軸銷對限深塊作用力,N;3x為3在水平方向分量,N;3y為3在豎直方向分量,N。
注:1為限深臂對限深塊反作用力,1=1,N;2為播深調節結構對限深塊作用力,N;3為軸銷對限深塊作用力,N;4為單體架對軸銷傳感器作用力,N;3x、3y分別為3在水平和豎直方向分量,N。
Note:1represents the force of limit shank to limit block,1=1, N;2represents the force of depth-adjustment rocker to limit block, N;3represents the force of axle pin to limit block, N;4represents the force of unit frame to axle pin sensor, N;3xand3yrespectively represent the horizontal and vertical component of3, N.
圖2 軸銷傳感器受力分析
Fig.2 Force analysis of axle pin sensor
由式(5)知,在限深臂對限深塊作用力一定情況下,軸銷傳感器豎直方向檢測值隨限深臂角度改變而變化,即播深設定影響限深輪下壓力測量準確性。考慮到實際作業中播種深度測量不便,本文在限深臂與機架鉸接處安裝角度傳感器,通過作業前測量限深臂與機架夾角,得到設定播種深度,實現對軸銷傳感器播種下壓力測量模型修正,獲得更為準確的播種下壓力測量值。
1.3 傳感器設計與選型
1.3.1 軸銷傳感器
軸銷傳感器量程的正確選取關系測量精度和準確性,文獻[24]通過公式估算傳感器量程,缺乏一定的理論依據。本文將通過理論分析來對傳感器量程進行選取,為后續類似結構中傳感器的選型提供借鑒和參考。為便于計算,忽略播種作業過程中限深臂動態變化及其質量,根據式(1)得

由式(5)、(6)得

播種作業前,通過搖動播深調節結構帶動限深塊擺動,進而改變限深臂上限位,達到調節播種深度目的,如圖3所示。
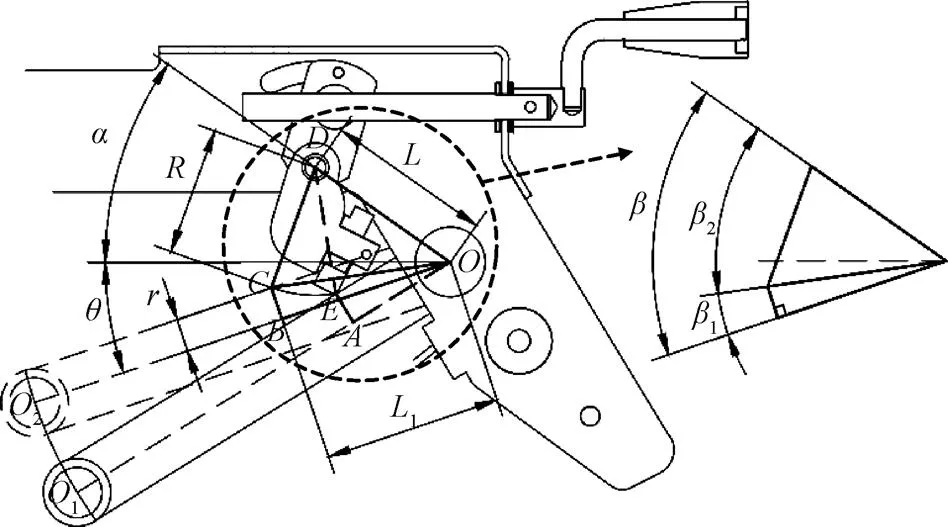
注:增大播種深度時,限深輪圓心從O1變化到O2,限深塊與限深臂接觸點從E點變到C點,則F1力臂L1長度發生變化。R為限深塊擺動半徑,m;r為限深臂接觸點距軸線距離,m;L為軸銷點D與限深臂鉸接點O距離,m;α為L與機架夾角,(°);β為L與L1夾角,(°);β1為L1與lOC夾角,(°);β2為L與lOC夾角,(°)。
在播深調節機構作用下,限深臂與限深塊作用力臂從OA變為OB,與限深塊接觸點變為點C。在此過程中,限深塊擺動半徑、軸銷圓心與限深臂鉸接圓心距離及限深臂寬度均不變,即CD=,OD=,BC=,且與機架水平夾角為,設1=,由圖3可知



將式(8)~(11)帶入式(12),替換后可得:

式中為限深塊擺動半徑,m;為限深臂接觸點距軸線距離,m;為限深塊與限深臂作用力臂長度,m;為軸銷處與限深臂鉸接處距離,m;為與機架水平夾角,(°)。
對式(13)求解可得

對2BFQ-6氣力播種機單體,手動測繪得:=0.095 m,=0.075 m,=0.02 m,=35°,L=0.25 m,15°≤≤35°。代入式(14)并求解得:0.06 m≤1≤0.114 m,0.004 m≤2≤0.008 m。由于2數值過小,不合實際,則11。根據式(7)、(14)可得軸銷傳感器垂直方向受力

由式(15)可知,軸銷傳感器所受力3y與限深臂角度以及實際下壓力F有關,且F一定情況下,3y與正相關。玉米播種作業時,其壓實力參照文獻[27]選取為200 kg左右,為此設定限深輪垂直作用力F=2 000 N,將相關數值帶入式(15)可得3y最大為5 478 N。考慮到一定的安全系數,選擇軸銷傳感器量程為6 000 N,輸出電壓為0~5 V,并委托蚌埠眾城傳感器有限公司代為加工。
1.3.2 角度傳感器
為測量限深臂角度,設計如圖4所示限深臂角度測量裝置。其中,角度傳感器轉軸依次通過聯軸器、連接螺栓、擺臂銷軸,最終和機架固定,傳感器殼體通過聯軸器套固定在限深臂上,以此測得限深臂相對機架擺動角度,獲得限深輪相對開溝圓盤底部擺動高度,也即播種深度。
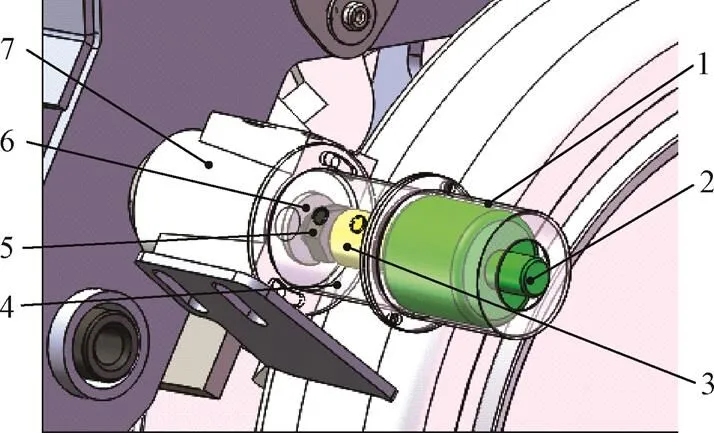
1.傳感器保護套 2.角度傳感器 3.聯軸器 4.聯軸器套 5.連接螺栓 6.擺臂銷軸 7.限深臂
根據限深臂擺動角度范圍,選擇霍爾角度傳感器(WOA-H-90-V1型,深圳市米朗科技有限公司)作為測量器件,其量程為90°,可輸出0~5 V模擬電壓。對傳感器進行角度和深度標定得


式中為角度傳感器輸出信號值,V;為播種深度,mm。
2 結果與分析
2.1 測量模型建立試驗
由上述力學分析知,設定不同播種深度時,旋轉播深調節機構會帶來限深臂角度的改變,以單個角度建立的模型來測量全部角度下實際下壓力的方法不準確,而每個角度建立一個測量模型的方法較復雜,不具有實用性。為提高模型通用性和準確性,本試驗將在不同播種深度設定下,通過改變單體向下壓力,記錄限深輪實際下壓力值和軸銷傳感器檢測值,以建立傳感器的實際播種下壓力測量模型。
如圖5所示,試驗前首先利用水平尺調整四連桿位置水平,以減小四連桿角度對電子秤測量值的影響,對升降架上的支撐板中間開槽以保證單體下壓力穩定作用在限深輪上。同時,在升降架下放置無線便攜式電子秤(TCS-300型,永康市華鷹衡器有限公司)以精確測量實際下壓力值,電子秤量程為0~3 000 N。然后,對電子秤進行去皮操作,以扣除升降架重量,獲得限深輪處實際壓力值。
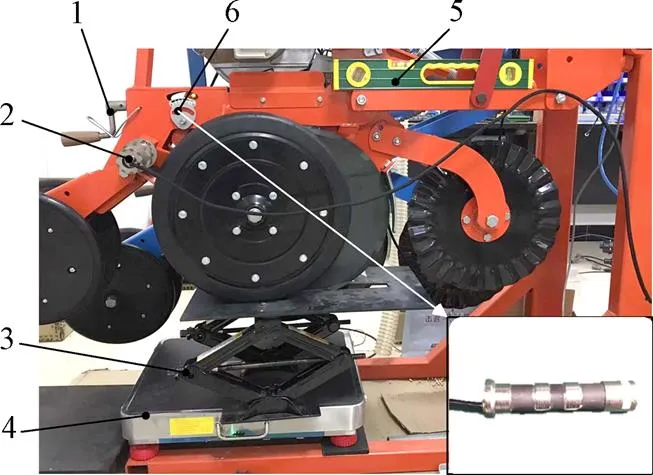
1.播深調節機構 2.角度傳感器 3.升降架 4.電子秤 5.水平尺 6.軸銷傳感器
由于限位固定片作用,限深臂角度調節范圍為15°~35°,且主要通過旋轉播深調節機構來實現,具體角度無法精確控制,為此,本試驗主要通過播深調節檔位來進行限深臂角度劃分,從小到大選取6個檔位,分別為32.8°、29.9°、27.2°、23.3°、20.7°和18.1°,根據式(17)得對應播種深度為18、29、39、54、64和73 mm。在每個檔位下,通過在四連桿上施加從小到大7級的作用力,記錄電子秤顯示值(f)和傳感器反饋值(f),重復3次取平均值(表1)。
由表1看出,不同播種深度設定下,在施加相同作用力下,因為單體結構和限深輪胎面變形等因素影響,造成實際下壓力測量值略有波動,最大差值為12 N。此外,相同播種深度設定下,軸銷傳感器壓力檢測值與實際下壓力值線性正相關,而相同施加力下,不同播深設定得到的傳感器檢測值差值較大,且播深檔位越小(限深臂角度越大),傳感器檢測壓力值越大,如在第7級壓力下,1檔播深設定下軸銷傳感器檢測值遠大于6檔設定,差值可達1 198.8 N,結果與前述分析相符,即在不考慮播種深度因素情況下,依靠軸銷傳感器檢測值并通過單一模型測量得到的下壓力值誤差較大,無法準確反映實際播種下壓力。
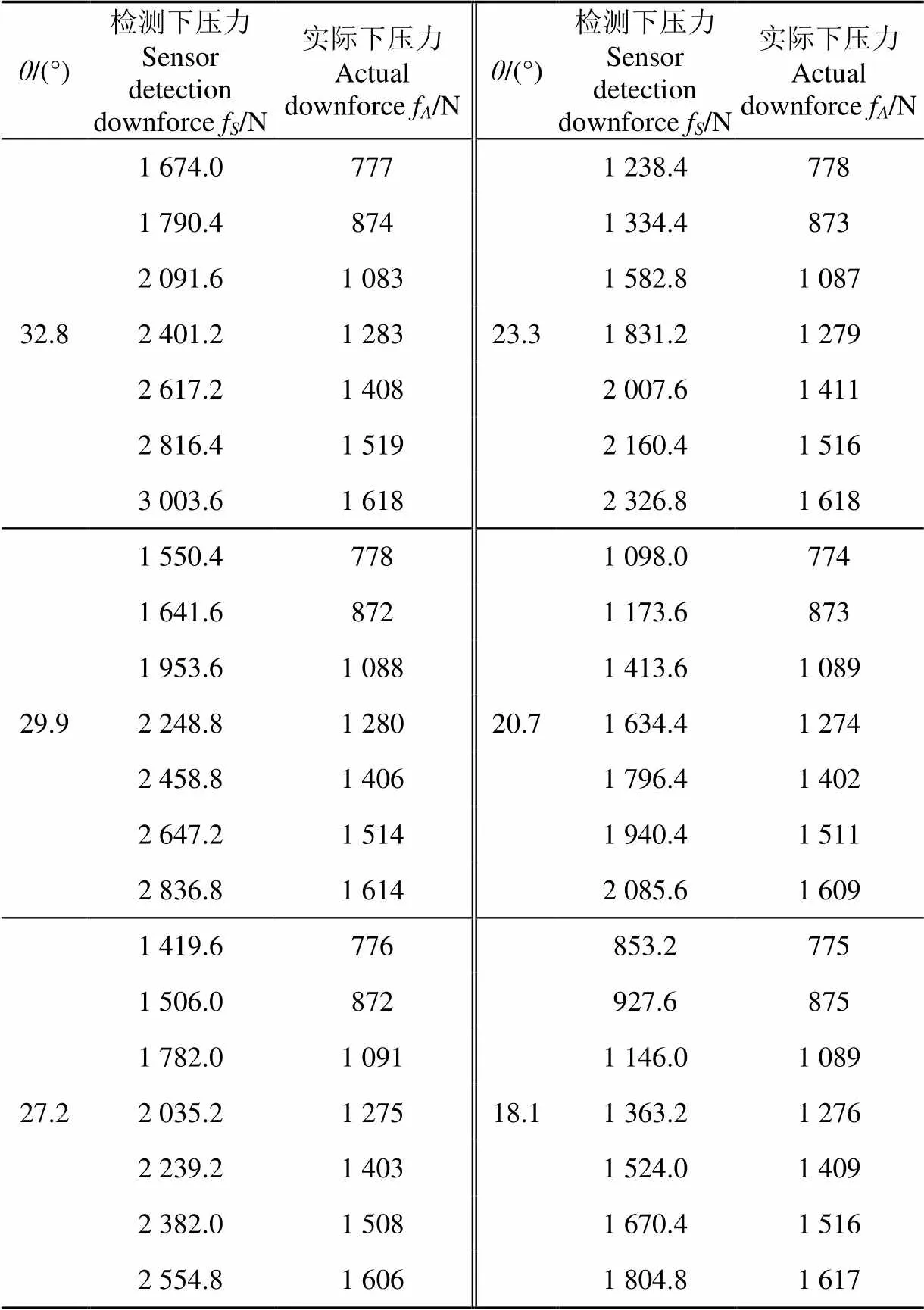
表1 下壓力測量建模試驗數據
進一步,運用Matlab對數據進行回歸分析,選擇多項式逼近擬合方式,建立實際播種下壓力測量模型。綜合考慮模型預測精度和運算效率,同時避免出現高階次模型過擬合現象,本文選擇二階方程進行擬合,最終得到模型方程為

同理,將式(17)代入式(18)可得融合播種深度的下壓力測量模型

式中f為實際播種下壓力,N;f為軸銷傳感器壓力檢測值,N;為限深臂角度測量值,=p/180,rad。其中,模型和方差為30860,決定系數(2)為0.991 6,校正決定系數(2)為0.9907,均方根誤差(root mean square error,RMSE)為28.88 N。
播種作業前,調節到設定播種深度后,通過限深臂角度測量裝置讀取此時限深臂角度,并賦值給下壓力測量模型,此時播種下壓力只與軸銷傳感器檢測值有關,排除限深臂角度影響同時,也提高了模型測量精度。進一步,為驗證所建模型對實際下壓力的測量精度,利用單體測試試驗臺進行了室內驗證試驗。考慮到單體實際作業情況,調節播深調節機構,隨機選取3個限深臂角度進行測試,測量其角度分別為19.3°、24.6°和31.5°,分別對應播種深度69、49和22 mm。在3種播深設定下,改變單體下壓力,記錄實際下壓力值(電子秤值)和模型預測值。以實際下壓力值為橫坐標,模型預測值為縱坐標,繪制出圖6所示預測值散點圖,其中=表示實際下壓力值。
從圖6看出,模型預測值處于實際下壓力值附近,整體預測性較好。統計模型預測值與實際值絕對誤差可知,當=19.3°時,預測誤差絕對值最大為44.13 N,平均值為19.57 N,最大預測誤差為2.85%;當=24.6°時,預測誤差絕對值最大為25.69 N,平均值為14.66 N,最大預測誤差為3.28%;當=31.5°時,預測誤差絕對值最大為20.01 N,平均值為14.73 N,最大預測誤差為1.59%,模型預測精度滿足測量需求。
2.2 播種下壓力田間動態變化試驗
播種機工作時,地形和土壤變化造成限深輪的上下振動,帶來限深塊對軸銷傳感器的碰撞和沖擊,影響播種下壓力測量穩定性。為解析播種下壓力動態變化的頻率構成,實現對下壓力信號的處理,本研究于2019年4月在河北省趙縣姚家莊村進行了單體播種下壓力變化特性試驗(圖7)。采用二因素裂區試驗設計方法,對試驗田進行不同處理(主區,免耕和旋耕),并在不同作業速度(副區,4、6、8、10 km/h)下采集傳感器檢測壓力值。
為保證傳感器主頻波段解析準確性,試驗設定采樣頻率為200 Hz,利用電子控制單元(TTC32型,TTControl GmbH)采集傳感器信號,USBCAN分析儀(USBCAN-E-U型,廣州致遠電子有限公司)傳輸信號,上位機ZLGCANTest軟件存儲采樣值。其中,每種處理采樣時間為40 s,獲取數據8 000個,并對其進行離散傅立葉變換(discrete Fourier transform,DFT),處理公式[28]如下
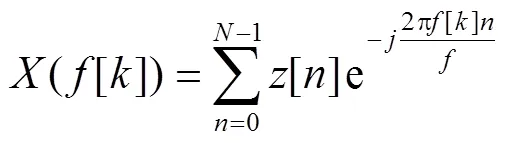
式中f為采樣頻率,Hz;f[k]為數據z的離散頻率組成,f[k]=kf/N,k=0,1,…,N;x[n]為長度為N的有限長序列;X(f[k])為DFT變換后數據。
從圖8看出,免耕地下,隨著車速增加,播種下壓力單位時間內變化更劇烈,且變化高頻成分增加,如6~10 km/h車速下出現10 Hz以上頻率成分,且幅值隨車速增大而增大。同樣情況也發生在旋耕地下,這說明高速下限深臂對限深塊的碰撞沖擊更強,增大了軸銷傳感器下壓力檢測值,即車速對播種下壓力測量值和振蕩頻率具有較大影響,低速作業可以保證更穩定的播種下壓力。此外,免耕地下,4 km/h車速下播種下壓力變化主頻幅值最高,為219.1 N,而6~8 km/h下主頻幅值變化不大。旋耕地下,最高主頻幅值也出現在4 km/h車速下,為161.4 N,且4~6 km/h車速下主頻幅值隨車速增加而降低。
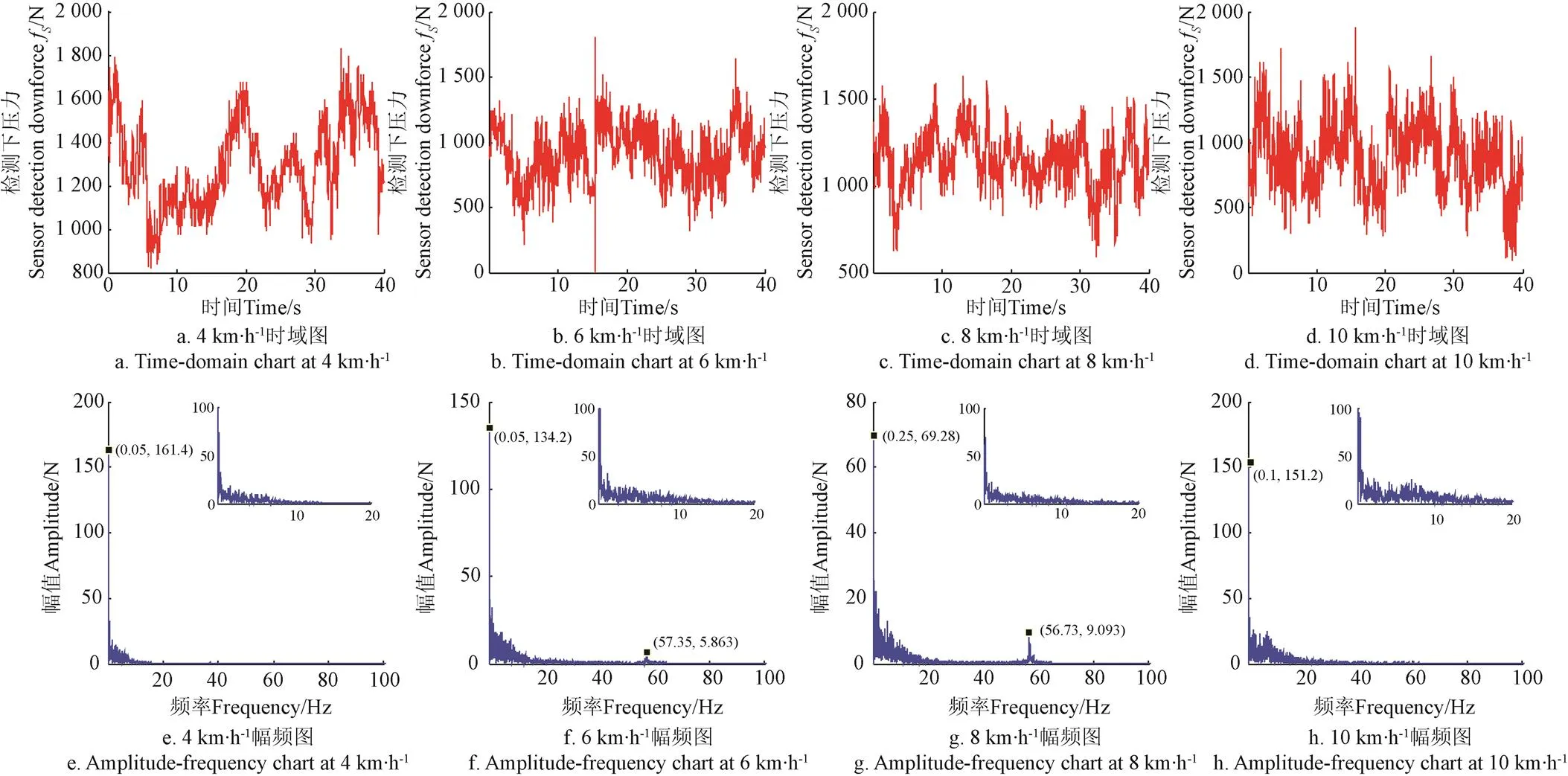
對比2種耕作方式發現,播種下壓力變化主頻主要集中在0~20 Hz區間內,且免耕地下主頻幅值大于旋耕地下主頻幅值,如免耕地下主頻幅值最大為219.1 N(4 km/h),而旋耕地下主頻最大幅值為161.4 N,從時域圖中也可看出,免耕地播種下壓力變化幅度大于旋耕地下壓力變化幅度,這也說明免耕地下限深塊對傳感器的碰撞與沖擊比旋耕地下更為劇烈,對傳感器檢測準確性影響更大。對后續播種下壓力信號處理來說,建議針對不同耕作方式進行適宜的濾波方式,以保證較好的信號采集效果。
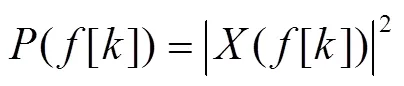
此外,對比圖9旋耕地中不同車速下壓力變化幅值發現,變化主頻區間(0~20 Hz)之外,4和10 km/h車速下,高頻幅值變化基本為0,而6和8 km/h車速下各出現了較大幅值振蕩(圖9f和9g),其最大變化幅值分別為5.863和9.093 N,對應頻率分別為57.35和56.73 Hz,由于拖拉機垂向振動固有頻率集中在3~4 Hz之間[29-30],即拖拉機振動激勵頻率遠小于異常頻率。為進一步分析其成分特性,計算2種速度下功率譜密度(power spectral density, PSD),得到圖10所示PSD曲線,并提取頻率50~70 Hz區間繪制局部放大圖。其中,計算公式[31]如下
注:圖中標記點為主頻區間最大幅值坐標點。
Note: Mark points in the figure are the coordinate points of the maximum amplitude in the main frequency range.
圖8 免耕地播種下壓力動態變化
Fig.8 Dynamic change of seeding downforce in no-tillage field
注:圖中標記點為主頻區間最大幅值坐標點,其中圖f和g包含50~60 Hz區間異常頻率坐標點。
從圖10中看出,2種速度下,57 Hz振蕩頻率的PSD相對整體而言較小,特別在6 km/h速度下,最大PSD值不到700 N2/Hz,幾可忽略不計。同理,計算所有處理下的播種下壓力功率譜密度,并提取0~10 Hz以內的功率譜密度峰值,繪制如圖11所示下壓力變化PSD峰值散點圖,其中主圖為線性峰值散點圖,局部圖為對數峰值圖。
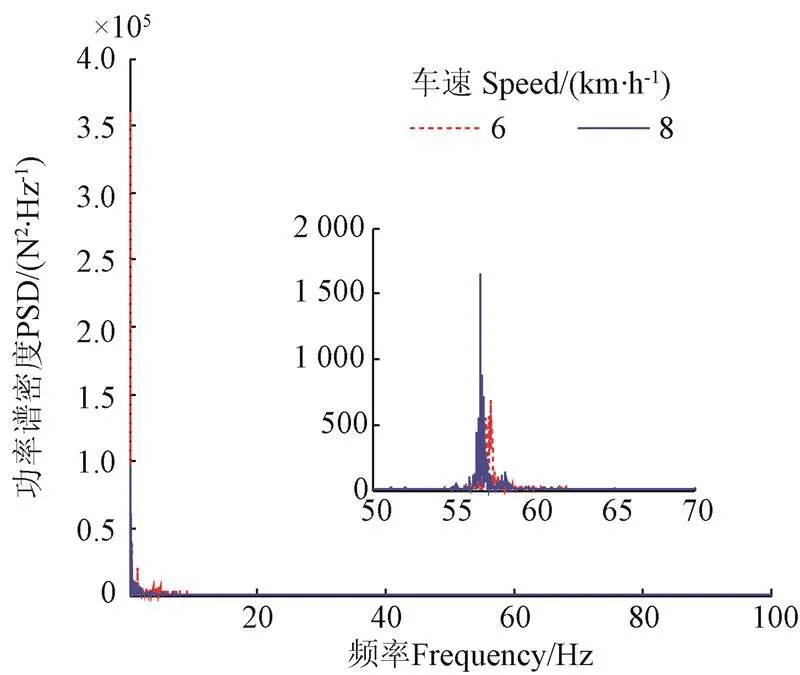
圖10 免耕地6和8 km·h-1車速下壓力變化功率譜密度(PSD)
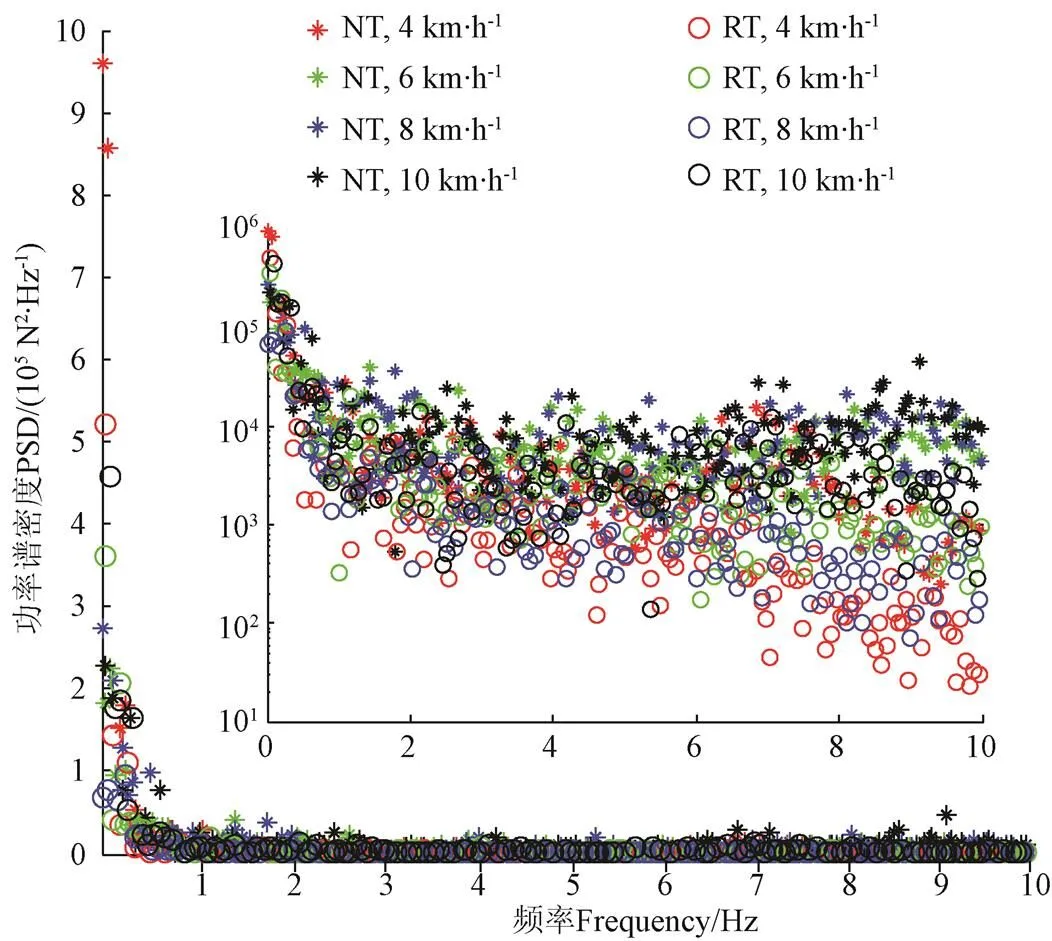
注:NT為免耕地,RT為旋耕地,局部圖為半對數坐標圖。
可以發現,主頻區間內各個PSD峰值差值較大,為更清楚觀察低能量噪聲中周期信號,對PSD峰值進行處理,繪制半對數坐標峰值圖,如圖11局部圖所示,其橫坐標為線性坐標,縱坐標為對數坐標。從圖11看出,免耕地下各頻率對應能量峰值普遍大于旋耕地,而不同速度和耕作方式下,播種下壓力變化主頻區別不大,主要集中在0~1 Hz范圍內,可以作為后續信號低通濾波處理的依據。
3 結 論
1)基于限深輪的播種下壓力測量原理數學分析指出,限深臂角度是影響下壓力檢測準確性的重要因素。采用軸銷傳感器下壓力測量方法,設計了限深臂角度測量裝置,完成了軸銷傳感器力學分析和設計選型。
2)針對基于傳感器檢測值的單一測量模型精度不高,通用性不強問題,搭建了室內試驗臺,以軸銷檢測下壓力和播種深度為試驗因素進行下壓力測量試驗與建模,結果表明,融合播種深度的測量修正模型決定系數為0.991 6,均方根誤差為28.88 N;驗證試驗顯示,不同播種深度下,模型預測誤差絕對值最大為44.13 N,最大相對預測誤差為3.28%,滿足下壓力測量精度需求。
3)對播種下壓力田間動態變化進行頻譜和PSD分析,結果表明,車速增大造成下壓力時域變化更劇烈,帶來高頻成分的增加。在4~8 km/h車速下,播種下壓力振蕩主頻幅值隨車速增加呈一定減小趨勢,且在免耕地中下壓力變化主頻幅值和PSD峰值均大于旋耕地。播種下壓力振蕩主頻受車速和耕作方式影響較小,主要集中在0~1 Hz。本研究結果可為下壓力測量濾波等信號處理提供依據。
[1] 楊麗,顏丙新,張東興,等. 玉米精密播種技術研究進展[J]. 農業機械學報,2016,47(11):38-48.
Yang Li, Yan Bingxin, Zhang Dongxing, et al. Research progress on precision planting technology of maize[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(11): 38-48. (in Chinese with English abstract)
[2] 林靜,李寶筏,李宏哲. 阿基米德螺線型破茬開溝和切撥防堵裝置的設計與試驗[J]. 農業工程學報,2015,31(17):10-19.
Lin Jing, Li Baofa, Li Hongzhe. Design and experiment of Archimedes spiral type stubble breaking ditching device and stubble breaking anti blocking device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(17): 10-19. (in Chinese with English abstract)
[3] 王奇,朱龍圖,李名偉,等. 指夾式玉米免耕精密播種機振動特性及對排種性能的影響[J]. 農業工程學報,2019,35(9):9-18.
Wang Qi, Zhu Longtu, Li Mingwei, et al. Vibration characteristics of corn no-tillage finger-type precision planter and its effect on seeding performance[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(9): 9-18. (in Chinese with English abstract)
[4] Hanna H M, Steward B L, Aldinger L. Soil loading effects of planter depth-gauge wheels on early corn growth[J]. Applied Engineering in Agriculture, 2010, 26(4): 551-556.
[5] Molatudi R L, Mariga I K. The effect of maize seed size and depth of planting on seedling emergence and seedling vigour[J]. Journal of Applied Sciences Research, 2009, 5(12): 2234-2237.
[6] 張瑞. 一年兩熟地區麥茬地玉米免耕播種播深控制機構的研究[D]. 北京:中國農業大學,2016.
Zhang Rui. Study on Precision Depth-control Mechanism of Corn No-till Planter in Double-cropping Area[D]. Beijing: China Agricultural University, 2016. (in Chinese with English abstract)
[7] Gupta S C, Swan J B, Schneider E C. Planting depth and tillage interactions on corn emergence[J]. Soil Science Society of America Journal, 1988, 52(4): 1122-1127.
[8] 關小康,楊明達,白田田,等. 適宜深播提高地下滴灌夏玉米出苗率促進苗期生長[J]. 農業工程學報,2016,32(13):75-80.
Guan Xiaokang, Yang Mingda, Bai Tiantian, et al. Suitable deep sowing increasing emergence rate and promoting summer maize growth in seeding stage under subsurface drip irrigation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(13): 75-80. (in Chinese with English abstract)
[9] 羅錫文,廖娟,胡煉,等. 提高農業機械化水平促進農業可持續發展[J]. 農業工程學報,2016,32(1):1-11.
Luo Xiwen, Liao Juan, Hu Lian, et al. Improving agricultural mechanization level to promote agricultural sustainable development[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(1): 1-11. (in Chinese with English abstract)
[10] 白曉虎,李芳,張祖立,等. 基于ADAMS的免耕播種機仿形機構彈簧參數優化[J]. 干旱地區農業研究,2014,32(6):268-272.
Bai Xiaohu, Li Fang, Zhang Zuli, et al. Parameter optimization for the profiling mechanism spring of no-till planter based on ADAMS[J]. Agricultural Research in the Arid Areas, 2014, 32(6): 268-272. (in Chinese with English abstract)
[11] 趙淑紅,蔣恩臣,閆以勛,等. 小麥播種機開溝器雙向平行四桿仿形機構的設計及運動仿真[J]. 農業工程學報,2013,29(14):26-32.
Zhao Shuhong, Jiang Enchen, Yan Yixun, et al. Design and motion simulation of opener with bidirectional parallelogram linkage profiling mechanism on wheat seeder[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(14): 26-32. (in Chinese with English abstract)
[12] Yang Li, Zhang Rui, Liu Quanwei, et al. Row cleaner and depth control unit improving sowing performance of maize no-till precision planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(17): 18-23.
楊麗,張瑞,劉全威,等. 防堵和播深控制機構提高玉米免耕精量播種性能(英文)[J]. 農業工程學報,2016,32(17):18-23. (in English with Chinese abstract)
[13] 牛金亮,林靜,邢作常,等. 免耕播種機液壓式加載仿形深度控制系統設計[J]. 農機化研究,2013,35(12):101-104.
Niu Jinliang, Lin Jing, Xing Zuochang, et al. Design on sowing depth control system loaded by hydraulic pressure for no-till planter[J]. Journal of Agricultural Mechanization Research, 2013, 35(12): 101-104. (in Chinese with English abstract)
[14] Nielsen S K, N?rremark M, Green O. Sensor and control for consistent seed drill coulter depth[J]. Computers and Electronics in Agriculture, 2016, 127: 690-698.
[15] 趙金輝,劉立晶,楊學軍,等. 播種機開溝深度控制系統的設計與室內試驗[J]. 農業工程學報,2015,31(6):35-41.
Zhao Jinhui, Liu Lijing, Yang Xuejun, et al. Design and laboratory test of control system for depth of furrow opening[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(6): 35-41. (in Chinese with English abstract)
[16] Suomi P, Oksanen T. Automatic working depth control for seed drill using ISO 11783 remote control messages[J]. Computers and Electronics in Agriculture, 2015, 116: 30-35.
[17] 陳蔣,王淼森,趙明,等. 玉米播種機電液播深調節裝置運動仿真與優化[J]. 農機化研究,2017,39(10):128-132.
Chen Jiang, Wang Miaosen, Zhao Ming, et al. Motion simulation and optimization design of electro-hydraulic sowing depth adjusting device for corn seeder[J]. Journal of Agricultural Mechanization Research, 2017, 39(10): 128-132. (in Chinese with English abstract)
[18] Gao Y Y, Wang X, Zhao X G, et al. Down-pressure control system for adequate and consistent sowing depth of no-till planter, Detroit, MI, United states, 2018[C]//American Society of Agricultural and Biological Engineers, 2018.
[19] 姜鑫銘. 玉米免耕播種機精確播種關鍵技術研究[D]. 長春:吉林大學,2017.
Jiang Xinming. Study on Key Technologies of Precision Seeding for Maize No-tillage Planter[D]. Changchun: Jilin University, 2017. (in Chinese with English abstract)
[20] Precision Planting Inc. 20/20 airforce owner's manualsion [EB/OL]. [2019-07-28]. https://support.precisionplanting.com.
[21] 黃東巖,朱龍圖,賈洪雷,等. 基于壓電薄膜的免耕播種機播種深度控制系統[J]. 農業機械學報,2015,46(4):1-8.
Huang Dongyan, Zhu Longtu, Jia Honglei, et al. Automatic control system of seeding depth based on piezoelectric film for no-till planter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(4): 1-8. (in Chinese with English abstract)
[22] 李玉環,孟鵬祥,耿端陽,等. 玉米播種深度智能調控系統研究[J]. 農業機械學報,2016,47(增刊1):62-68.
Li Yuhuan, Meng Pengxiang, Geng Duanyang, et al. Intelligent system for adjusting and controlling corn seeding depth[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(Supp.1): 62-68. (in Chinese with English abstract)
[23] Karayel D, ?zmerzi A. Evaluation of three depth-control components on seed placement accuracy and emergence for a precision planter[J]. Applied Engineering in Agriculture, 2008, 24(3): 271-276.
[24] 付衛強,董建軍,梅鶴波,等. 玉米播種單體下壓力控制系統設計與試驗[J]. 農業機械學報,2018,49(6):68-77.
Fu Weiqiang, Dong Jianjun, Mei Hebo, et al. Design and test of maize seeding unit downforce control system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(6): 68-77. (in Chinese with English abstract)
[25] 高原源,王秀,楊碩,等. 播種機氣動式下壓力控制系統設計與試驗[J]. 農業機械學報,2019,50(7):19-29,83.
Gao Yuanyuan, Wang Xiu, Yang Shuo, et al. Design and test of pneumatic downforce control system for planting[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(7): 19-29, 83. (in Chinese with English abstract)
[26] 胡軍. 精密播種單體播深控制的理論與試驗研究[D]. 長春:吉林大學,2012.
Hu Jun. Theory and Experimental Research of Sowing Depth Control for Precision Seeder Unit[D]. Changchun: Jilin University, 2012. (in Chinese with English abstract)
[27] Poncet A M, Fulton J P, McDonald T P, et al. Effect of heterogeneous field conditions on corn seeding depth accuracy and uniformity[J]. Applied Engineering in Agriculture, 2018, 34(5): 819-830.
[28] Marchant B P. Time-frequency analysis for biosystems engineering[J]. Biosystems Engineering, 2003, 85(3): 261-281.
[29] 徐剛,朱思洪,聶信天,等. 國產拖拉機振動系統固有頻率研究[J]. 振動與沖擊,2014,33(15):157-161.
Xu Gang, Zhu Sihong, Nie Xintian, et al. Natural frequencies calculation for vibrating systems of tractors made in China[J].
Journal of Vibration and Shock, 2014, 33(15): 157-161. (in Chinese with English abstract)
[30] 朱思洪,徐剛,袁加奇,等. 農具質量對拖拉機懸掛農具系統振動特性的影響[J]. 農業工程學報,2014,30(24):30-37.
Zhu Sihong, Xu Gang, Yuan Jiaqi, et al. Influence of implement's mass on vibration characteristics of tractor-implement system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(24): 30-37. (in Chinese with English abstract)
[31] Oppenheim A V, Schafer R W. Discrete-time Signal Processing[M]. Upper Saddle River: Prentice-Hall, Inc., 1989.
Measurement method and mathematical model for the seeding downforce of planter row unit
Gao Yuanyuan1,2, Zhai Changyuan2, Yang Shuo1,2, Zhao Xueguan2, Wang Xiu2,3, Zhao Chunjiang1,3※
(1.100083,;2.,100097,;3.,100097,)
Appropriate and consistent seeding downforce can reduce the vibration of row units and improve the stability of sowing depth. Studies have shown that the existing real-time measurement methods are not suitable for precise control of downforce due to the poor universality of methods, inadequate stability and low accuracy of output. To solve these problems and promote the development and application of downforce control technology, a universal measurement method was adopted by replacing the pin shaft of the limit block with the axle pin sensor. The mechanical analysis and design selection methods of the axle pin sensor were studied, which could provide a reference for the design of pin sensor with similar structure in the future. Based on the analysis of the motion of a gauge wheel, a relationship model between the seeding downforce and the sowing depth was established, which pointed out that the angle of limit shank was an important factor affecting the accuracy of downforce measurement. Then a sowing depth measurement device based on the angle of limit shank was designed and the corresponding depth measuring model was established to reduce the measurement error of single variable model with different sowing depth settings. Equipped with the sowing depth measurement device and the axle pin sensor, an indoor test platform was built and a modeling experiment with six kinds of sowing depth and seven levels of downforce was conducted. By using the polynomial approximation fitting method with Matlab, the sensor data was analyzed and a bivariate correction downforce measurement model was established with determination coefficient (2) of 0.991 6 and root mean square error (RMSE) of 28.88 N. To accurately evaluate the predictive performance of the model, a validation test with another three sowing depth settings and six downforce values was designed and carried out. The results showed that the maximum absolute value of prediction error was 44.13 N and the maximum relative prediction error was 3.28% with different sowing depth settings, which indicated that the downforce measurement model had good universality and accuracy. Furthermore, to analyze the frequency composition of dynamic change of seeding downforce caused by collision and impact during seeding operation, a field experiment of two-factor split plot was carried out with tillage mode and speed as experimental factors, and the data was collected by an electronic control unit (ECU) with the sample frequency of 200 Hz. Spectrum analysis of the data by discrete Fourier transform (DFT) showed that the time-domain variation of downforce was sharper at higher planting speed and a larger margin of downforce occurred in no-tillage field, which led to the increase of high-frequency components. Besides that, the main frequency amplitude of downforce vibration decreased with the increase of planting speed, whose maximum value was at 4 km/h, corresponding to 219.1 N and 161.4 N for the no-tillage field and the rotary tillage field respectively. The results of power spectral density (PSD) analysis of downforce signal showed that the main frequency amplitude and peak value of PSD in the no-tillage field were larger than that in the rotary tillage field. Moreover, the vibration frequency was less affected by tillage mode and planting speed, mainly concentrated in 0-1 Hz, which could provide a reference for low-pass filtering of signals in downforce control. The study can lay a foundation for precise control of seeding downforce.
mechanization; sensor; seeder; seeding downforce; sowing depth; mathematical model; axle pin sensor
2019-10-05
2020-01-09
國家重點研發計劃項目(2017YFD0700502)
高原源,博士生,主要從事精密播種技術研究。Email:gaoyy0910@foxmail.com
趙春江,中國工程院院士,研究員,博士生導師,主要從事農業信息技術與精準農業技術研究。Email:zhaocj@nercita.org.cn
10.11975/j.issn.1002-6819.2020.05.001
S24; S223.2
A
1002-6819(2020)-05-0001-09
高原源,翟長遠,楊 碩,趙學觀,王 秀,趙春江. 播種單體對地下壓力測量方法和數學模型[J]. 農業工程學報,2020,36(5):1-9. doi:10.11975/j.issn.1002-6819.2020.05.001 http://www.tcsae.org
Gao Yuanyuan, Zhai Changyuan, Yang Shuo, Zhao Xueguan, Wang Xiu, Zhao Chunjiang. Measurement method and mathematical model for the seeding downforce of planter row unit[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(5): 1-9. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.05.001 http://www.tcsae.org
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45