一種六自由度機械手的結構設計
2020-04-22 06:51:08陳珂馮卓群楊俊胡亮王一波傅宇文
機械制造與自動化 2020年1期
關鍵詞:模型
陳珂,馮卓群,楊俊,胡亮,王一波,傅宇文
(1. 上海航天控制技術研究所,上海 201101; 2. 中國航天科技集團公司 紅外探測技術研發中心,上海 201101; 3. 南京航空航天大學,江蘇 南京 210016)
0 引言
伴隨著現代工業自動化水平的不斷提高,機械手在批量化生產中逐步發揮著不可替代的作用。當武器裝備還處在預研階段時,生產制造的目的只是去驗證理論設計的合理性,所以此階段對產量的要求并不高,但是當產品進入批產階段,產品的需求量則會在短時間內成百倍甚至千倍的暴增。產量的增加會帶來一些問題:第一,當產品還處于研制階段的時候,裝調人員十分有限,但是這部分裝調人員往往具有不可替代的特點,且在短期內培養出類似的人才可能性較小。如果在產品沒有正式批產前儲備相應人才,又需要付出相應的人力物力,這其中不可控因素太多,風險太大。第二,同一批次的產品,由不同的裝調人員裝配出來,其各方面性能可能會有所差異,難以把控。第三,某型號的裝調人員往往只是對本型號的產品熟悉,若是調換到其他型號生產線上,往往需要較長的適應期。基于以上3點原因,著手設計一款機械手,以便于在裝備批產這一重復性要求較大的生產過程中完成抓取、運輸、裝配等一系列動作[1]。
1 六自由度機械手的理論基礎及模型設計
1.1 六自由度機械手設計
首先從工作范圍、占據空間等因素對幾種典型機械手的構型進行了比較,其中R表示轉動關節,P表示移動關節,如表1所示。在綜合考慮了機械手的工作空間大小、定位精度、自身所占用空間以及實際工況等因素,決定選用關節配置為RRR型機械手構型。

表1 經典機械手結構
一般情況下,六自由度串聯機械手的運動學逆解都沒有封閉解,若想存在封閉解,則需要滿足Pieper準則[1-2]:
1) 3個相鄰關節中心線相互平行;
2) 3個相鄰關節中心線交于一點。
六自由度機械手主要是由關節、連桿、基座等部分組成。為保證足夠的裝配精度,機械手各關節采用超聲電機驅動,共配置6臺電機。各關節部分采用模塊化關節設計,將電機、減速器、傳感器合為一體,方便后續的更換和維修,按照關節的負載大小,將機械手的關節分為兩部分,即大負載關節和小負載關節。
在CATIA中繪制出機械手的三維模型,如圖1所示。

圖1 六自由度機械手的三維模型
六自由度機械手在進行裝配時,其底座固定于平臺上,以保證其作業的穩定性。6個關節的理論轉角均為360°,關節與關節之間利用連桿以及法蘭盤進行連接,其中關節1、關節2、關節3采用加裝諧波減速器的方式來增大電機的輸出力矩,而后面的3個關節,則采用電機直接驅動的方式保證其精度。
1.2 六自由度機械手的正運動學模型
機械手的正運動學模型[3]主要由下面4個參數來描述。
對照圖1,可以得出機械手的DH參數表[4],如表2所示。
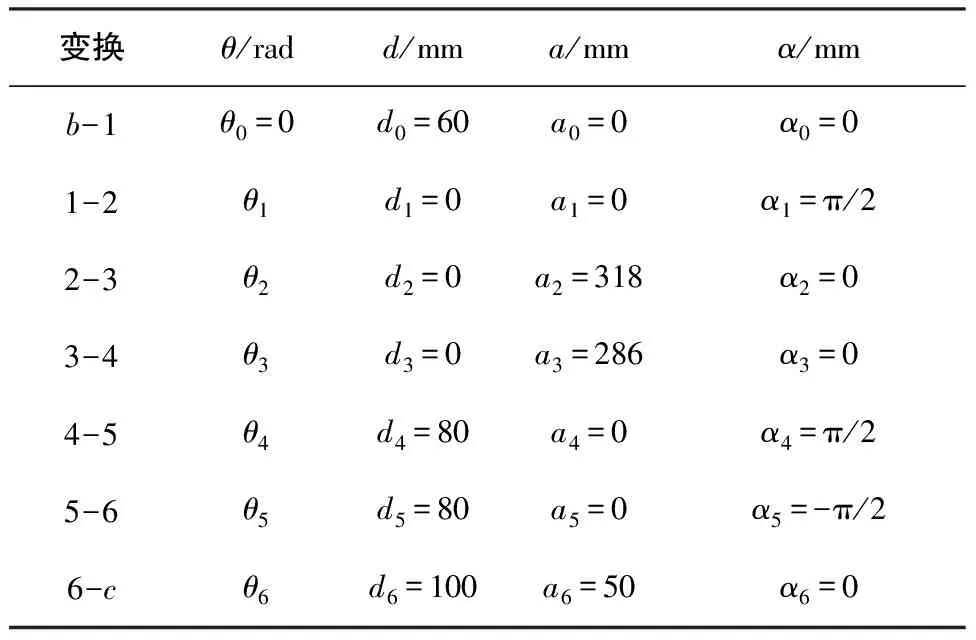
表2 六自由度機械手的DH參數表
利用MATLAB中的Robotics Toolboxs工具箱,繪制出機械手的連桿坐標系模型,如圖2所示,其中各圓柱的中心是連桿坐標系的原點,圖2和圖1所示的連桿模型位姿一致,從而驗證了DH參數表的正確性,并建立起了機械手的正運動學模型[5]。

圖2 MATLAB連桿模型
1.3 六自由度機械手的結構強度分析
在CATIA中為機械手的各個部件定義好材料,軟件自動計算出了各個關節的負載數據,如表3所示。

表3 機械手關節負載
由于機械手在實際運動過程中存在慣性力,各關節實際承受的力要比靜態時大,這里乘上一個系數1.1,得到了各關節的實際工作阻力。為使機械手殼體有足夠的強度,又希望殼體的質量能盡可能地輕便,故選擇7075鋁合金,其對應的拉伸強度為575MPa,屈服強度為504MPa。將模型導入ANSYS中,定義好材料屬性,劃分網格,添加對應的載荷,這里取關節1和連桿1這2個受力最大的零件,仿真結果如圖3、圖4所示。


圖3 關節1應力分布圖


圖4 連桿1應力分布圖
從圖中可以看出,關節和連桿的最大形變不超過0.01mm,最大應力不超過20MPa,本文所使用7075鋁合金的屈服強度為504MPa,取安全系數為1.5,安全應力為33.6MPa,大于20MPa,顯然符合強度要求。
2 六自由度機械手的動力學分析[6]
要進行機械手的動力學仿真,首先要對機械手的末端軌跡進行軌跡規劃,采用關節空間軌跡規劃法[7]。這種方法是針對空間已知曲線中一組相應的關節角值,利用五次多項式插值,得到可求導的關節驅動函數的方法[8]。這里選用驗證機械手性能最常見的方圓軌跡。
將CATIA中建立好的模型導入ADAMS中,然后在機械手的底座、關節連接處等部位設置好約束(即對6個旋轉關節添加旋轉副,對底座添加固定副),并定義好六自由度機械手的材料、密度、彈性模量、泊松比。此外,考慮到實際工況還需要對各關節添加一定的阻尼以貼合真實情況。設置仿真時間為33.4s,末端運動速度為280mm/s,機械手在ADAMS中繪制的仿真軌跡如圖5所示。

圖5 方圓軌跡
通過仿真測量,ADAMS計算出各關節運動的角速度-時間曲線,角位移-時間曲線,力矩-時間曲線等。此處僅羅列出關節1、關節2的角速度-時間曲線,如圖6、圖7所示。

圖6 關節1角速度-時間曲線

圖7 關節2角速度-時間曲線
結合ADAMS計算出的角速度-時間曲線以及力矩-時間曲線,可以對電機進行選型。1、2關節選用GTUSM-60-N-A型電機,為雙定子型;3、4、5關節采用GTUSM-60-N-A型電機,為單定子型;第6關節使用GTUSM-30-N-A電機。這里GTUSM表示電機為旋轉型行波型,30和60表示的是電機定子尺寸,N表示電機為非磁性材料制成。至此已經完成機械手的構型設計、強度分析以及電機的選型。
3 結語
為了解決武器型號從預研階段到批產階段中存在的裝配人員不足的問題,設計了一款六自由度機械手。首先,選擇了機械手的機械構型為RRR型,結合Pieper準則,確定了機械手的構型。然后在CATIA中繪制出了機械手的三維模型,設置相應的材料,計算出各關節負載,在ANSYS中進行仿真,驗證了各個殼體的強度。在空間中對機械手末端的軌跡進行規劃,并將機械手的三維模型導入ADAMS中,沿軌跡進行運動,得到了機械手各關節的角速度-時間曲線等,作為電機選型的依據[9-10],為后續的精度補償、控制等工作打下了基礎。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
