面向復(fù)雜產(chǎn)品元件裝配的流程建模與優(yōu)化
2020-04-22 10:37:08秦建軍路可欣
科學技術(shù)與工程 2020年7期
秦建軍, 林 鍵, 路可欣
(北京建筑大學機電與車輛工程學院,城市軌道交通車輛服役性能保障北京市重點實驗室,北京 100044)
產(chǎn)品元件裝配流程屬于相對復(fù)雜的系統(tǒng)工程,其元件間結(jié)構(gòu)錯綜復(fù)雜[1],對元件裝配進行合理規(guī)劃,可減少產(chǎn)品缺陷、提高質(zhì)量[2],同時加速創(chuàng)新,促進產(chǎn)品的持續(xù)改進與完善[3],實際上更是對元件進行有效的組織與管理[4]。
針對這一問題,中外學者進行了深入研究[5-6],在復(fù)雜產(chǎn)品元件模塊化聚類方面,Algeddawy等[7]提出基于設(shè)計結(jié)構(gòu)矩陣(design structure matrix, DSM)的層級聚類,以劃分元件結(jié)構(gòu)。Pandremenos等[8]運用布爾型DSM對元件間關(guān)系進行描述,并采用自組織神經(jīng)網(wǎng)絡(luò)算法進行聚類,使聚類精度得以提升。在元件裝配流程優(yōu)化方面,Yang等[9]提出從元件連接角度構(gòu)建產(chǎn)品模型,以選擇最佳裝配方式。在此基礎(chǔ)上,Li等[10]基于遺傳算法,對裝配路徑進行求解,在可選路徑中找到最大可能及最短時間的路徑。Ma等[11]從元件的連接角度出發(fā),構(gòu)建裝配網(wǎng)絡(luò)圖,并應(yīng)用改進的蟻群算法,尋找最小變更影響的裝配方式,提高了研發(fā)效率。為進一步解決元件裝配中的主觀性問題,Lian等[12]構(gòu)建了復(fù)雜產(chǎn)品設(shè)計網(wǎng)絡(luò),利用改進布谷鳥搜索算法對裝配流程進行優(yōu)化。
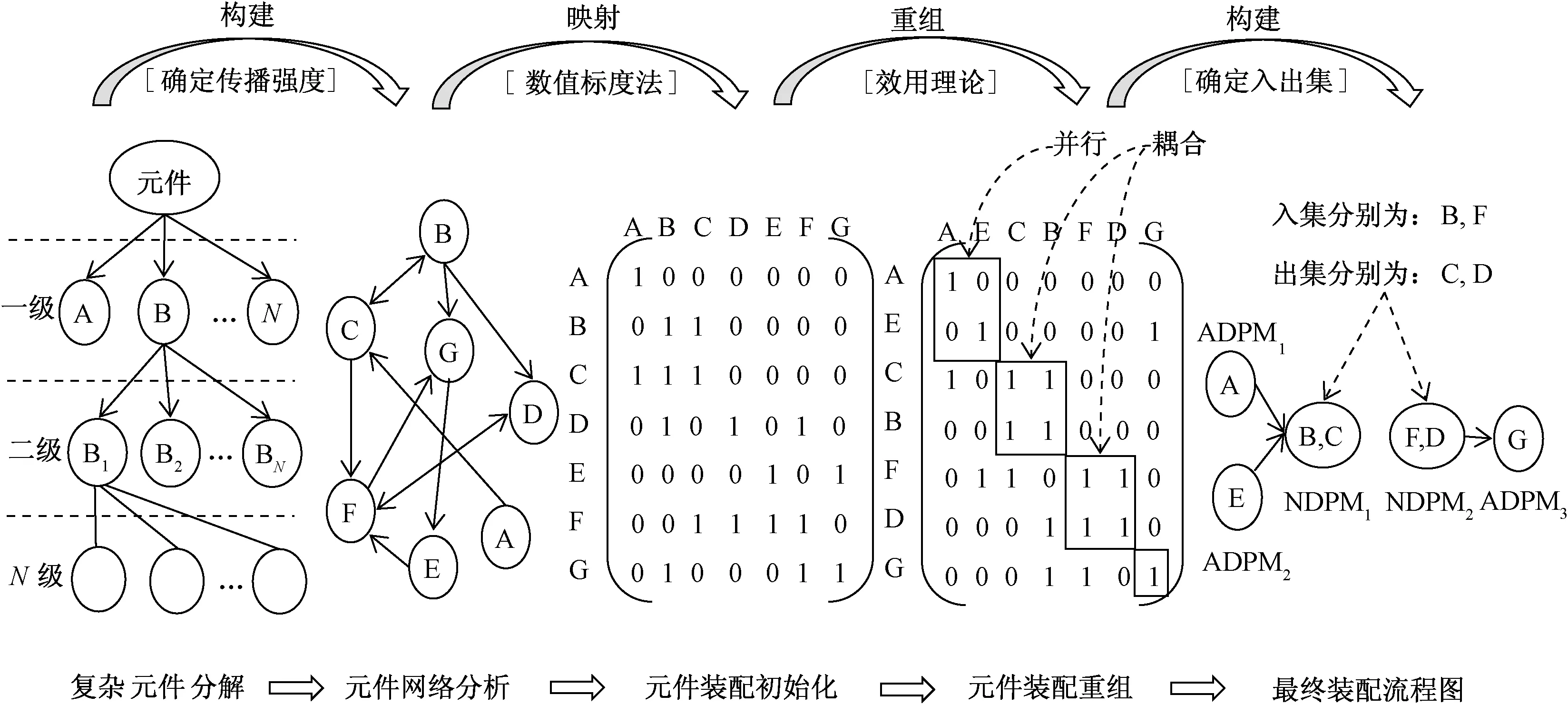
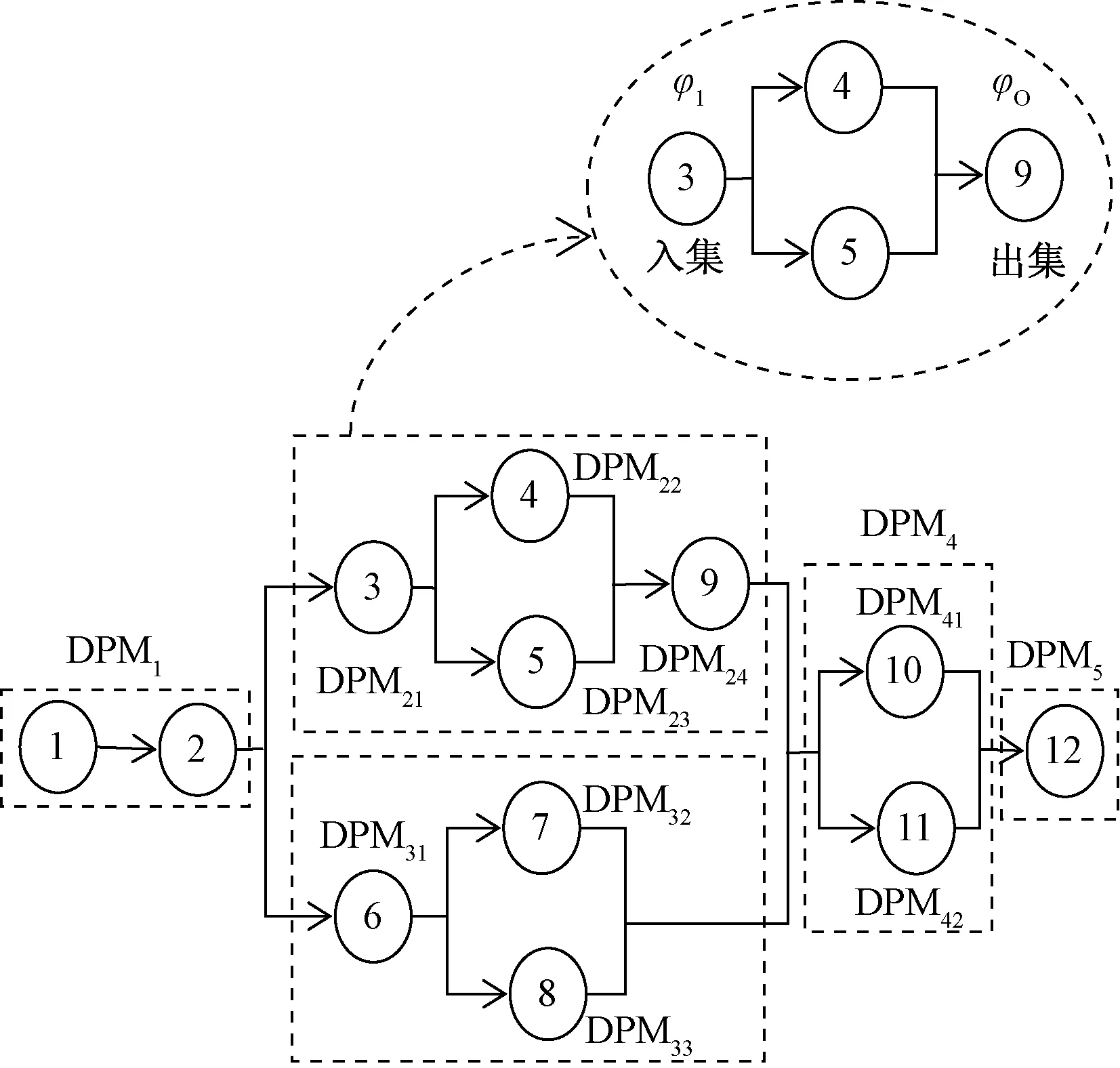
圖1 復(fù)雜元件裝配流程圖Fig.1 Complex component assembly flow chart
由此可以看出,在產(chǎn)品元件裝配問題上,大多數(shù)學者從元件模塊化聚類以及裝配流程優(yōu)化兩方面進行分析,以提升產(chǎn)品性能。為此,提出復(fù)雜產(chǎn)品元件裝配流程規(guī)劃方法,利用網(wǎng)絡(luò)分析模型與模糊DSM將元件的信息依賴關(guān)系定量化表示,基于效用理論進行模塊劃分,確定各元件模塊的入出集,最終實現(xiàn)元件的合理裝配,其具體流程如圖1所示,以液壓四足機器人腿部元件裝配為例[13-16],對該方法加以驗證。
1 復(fù)雜元件模塊化類型
1.1 設(shè)計過程模塊
設(shè)計過程模塊(design process module, DPM)表示產(chǎn)品設(shè)計的元件單元集合,G(φ)為每個DPM中元件單元個數(shù),當G(φ)≥1時則至少含有一個元件單元。將設(shè)計過程中耦合緊密度高的結(jié)構(gòu)元件結(jié)合在一起,通過矩陣變換以減少系統(tǒng)的信息輸入,降低產(chǎn)品設(shè)計開發(fā)的時間及成本。
1.2 原子設(shè)計過程模塊
原子設(shè)計過程模塊(atomic design process module, ADPM)指不能再次分解為子模塊的設(shè)計過程模塊,如圖2所示,由元件區(qū)、DPM序號區(qū)以及符號標志區(qū)組成,其中符號標志區(qū)用A表示,即為ADPM。
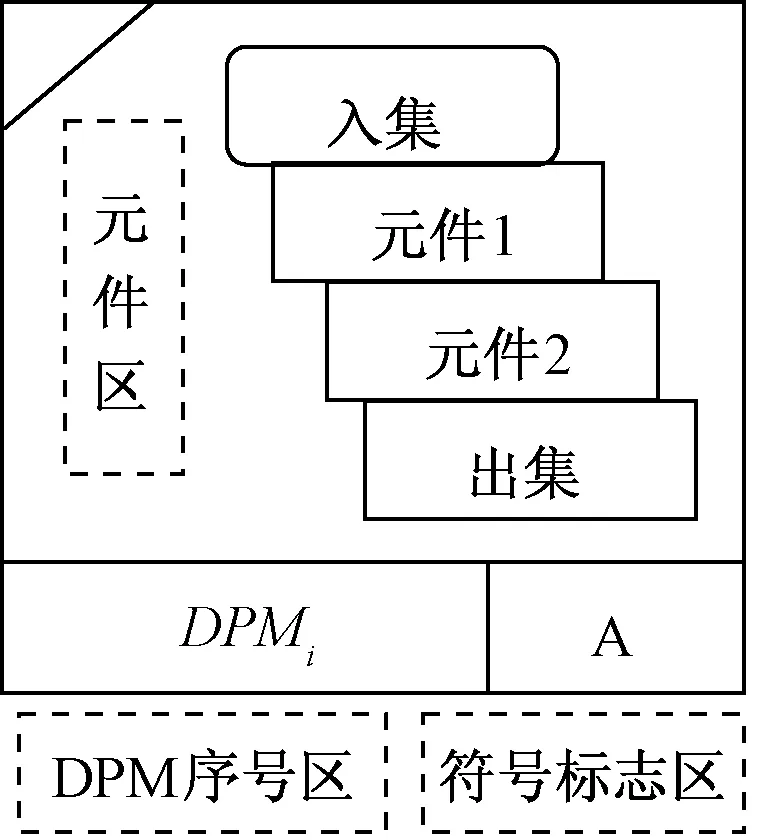
圖2 ADPM過程模塊Fig.2 ADPM process module
1.3 嵌套設(shè)計過程模塊
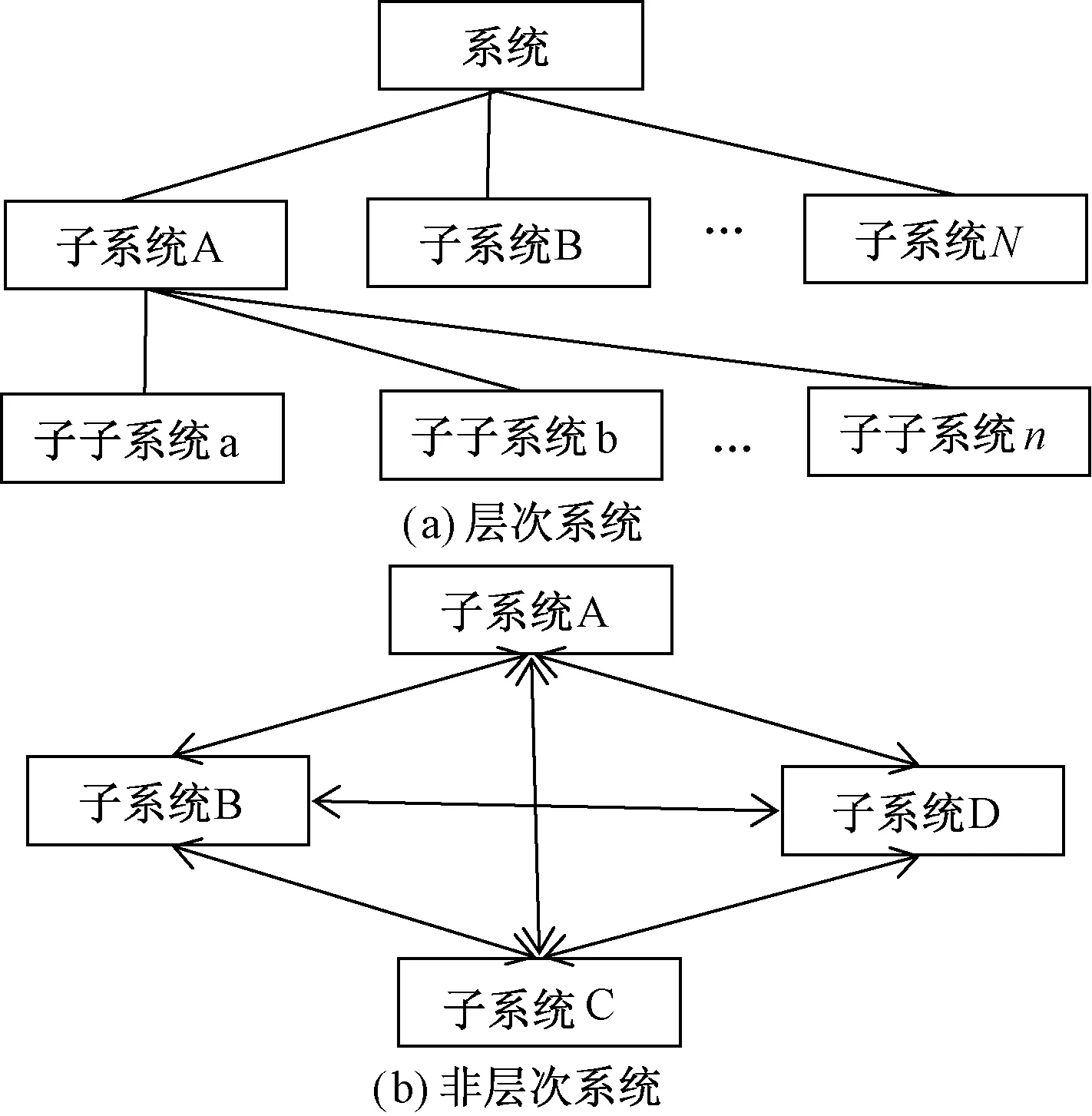
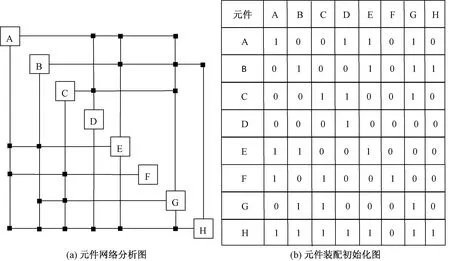
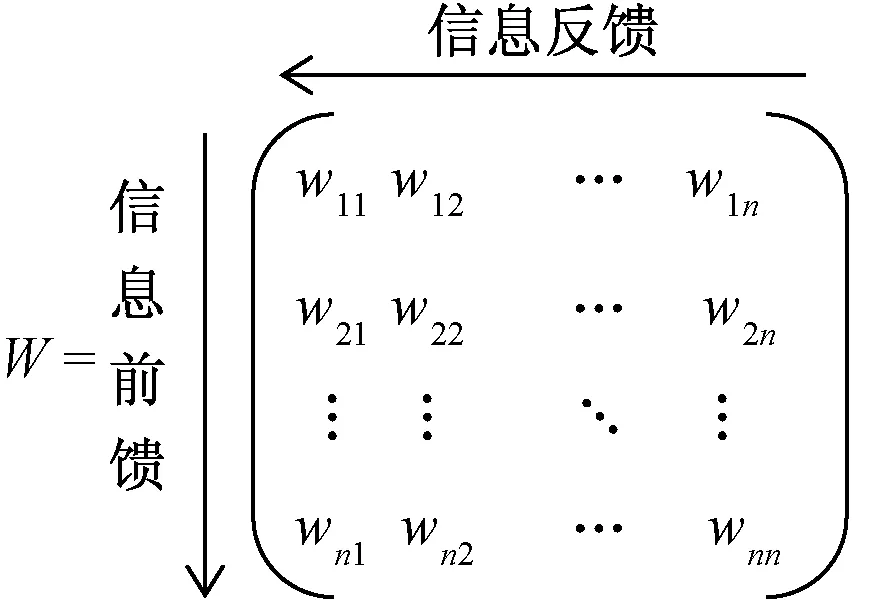
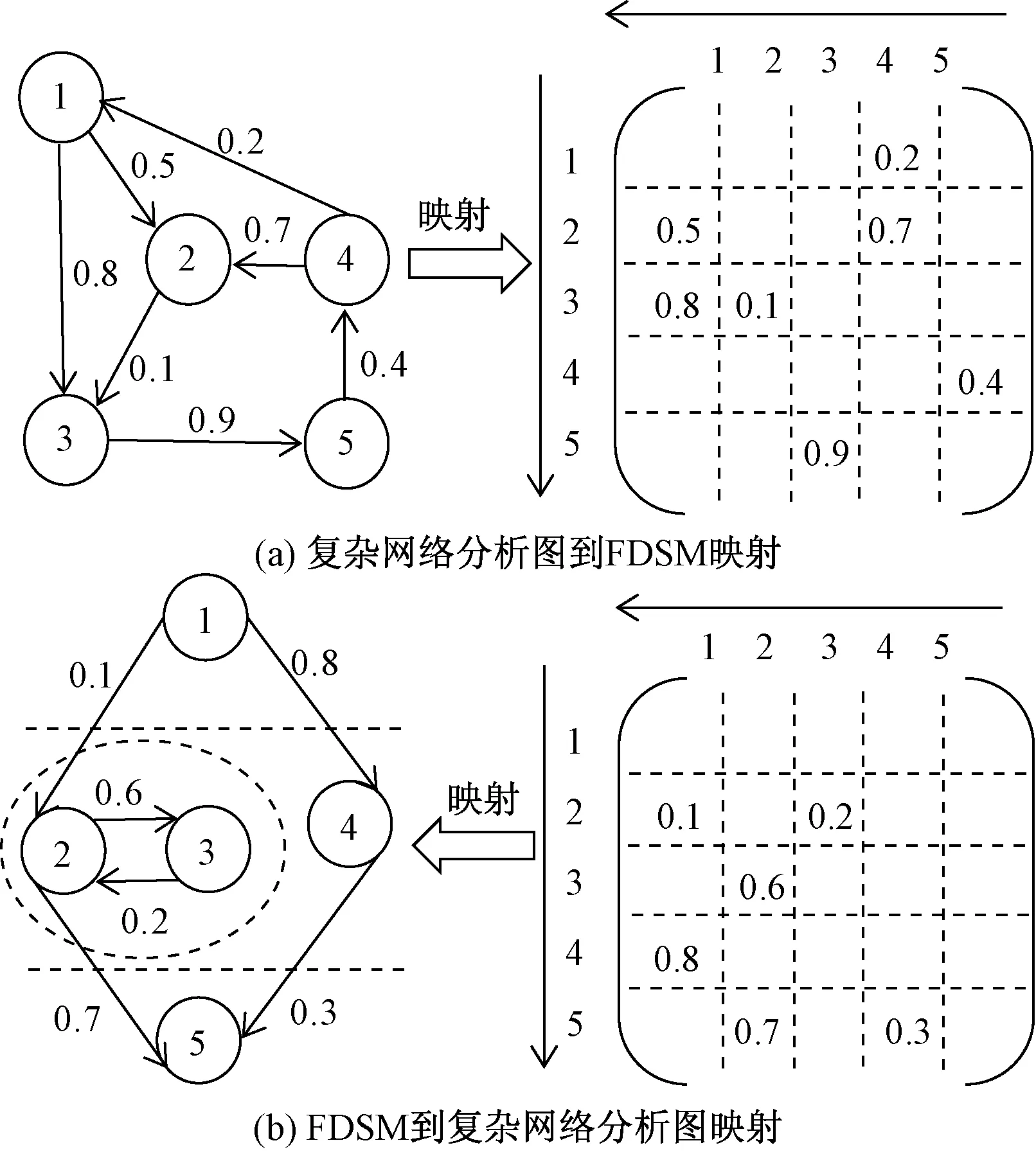
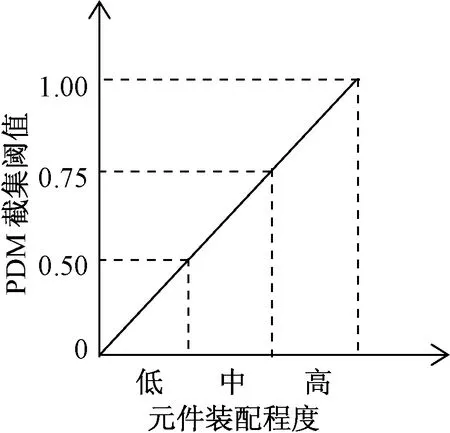
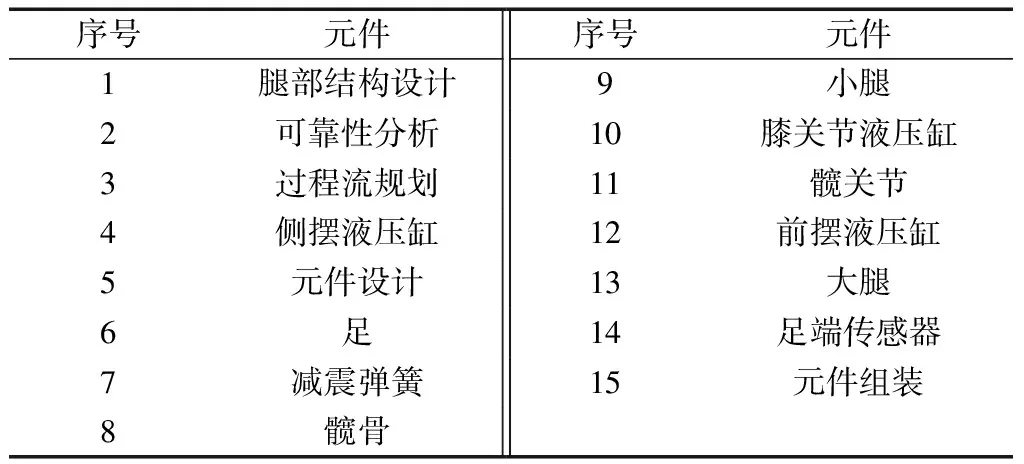
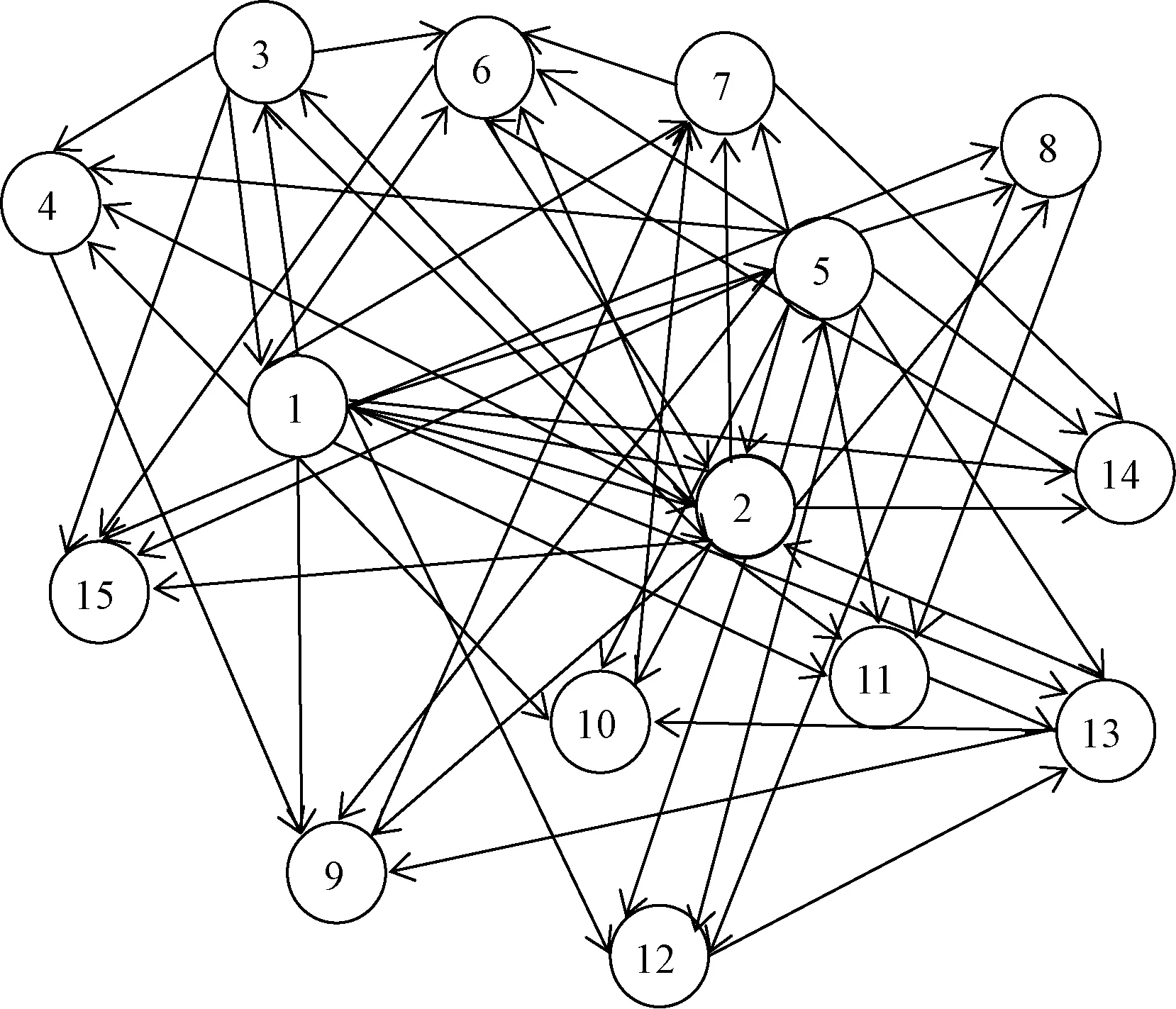
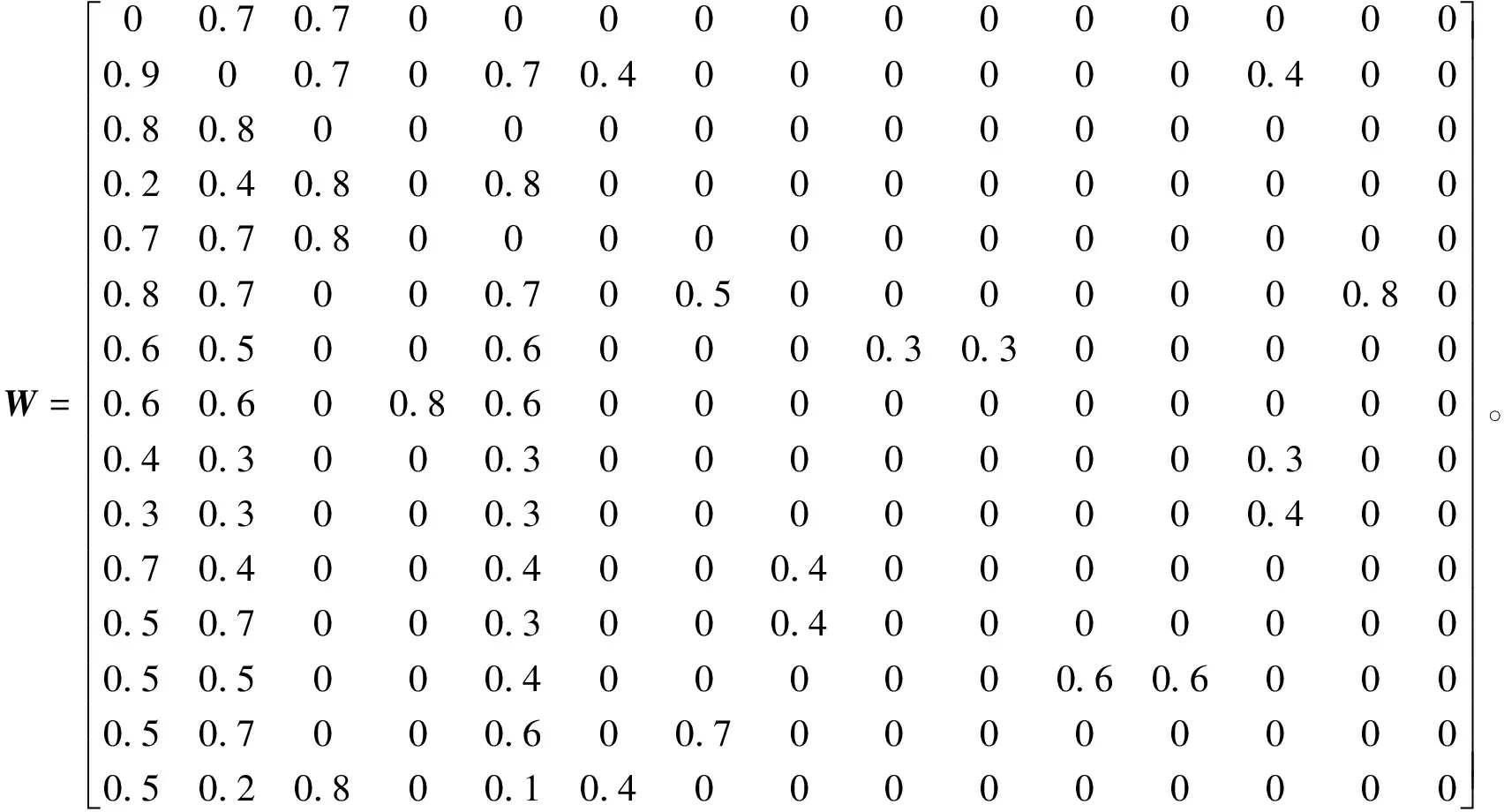
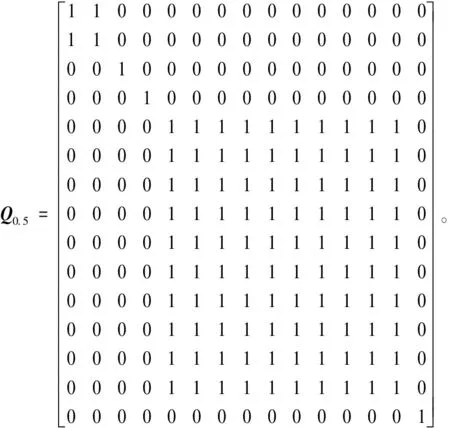
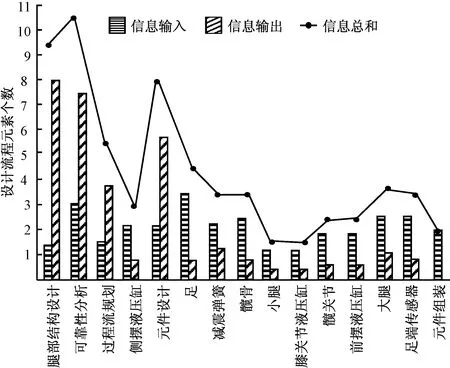
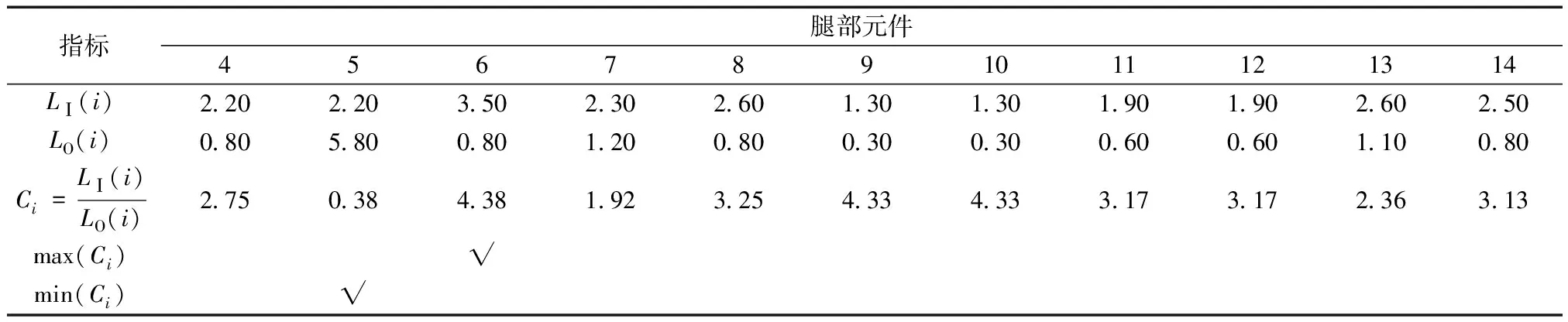
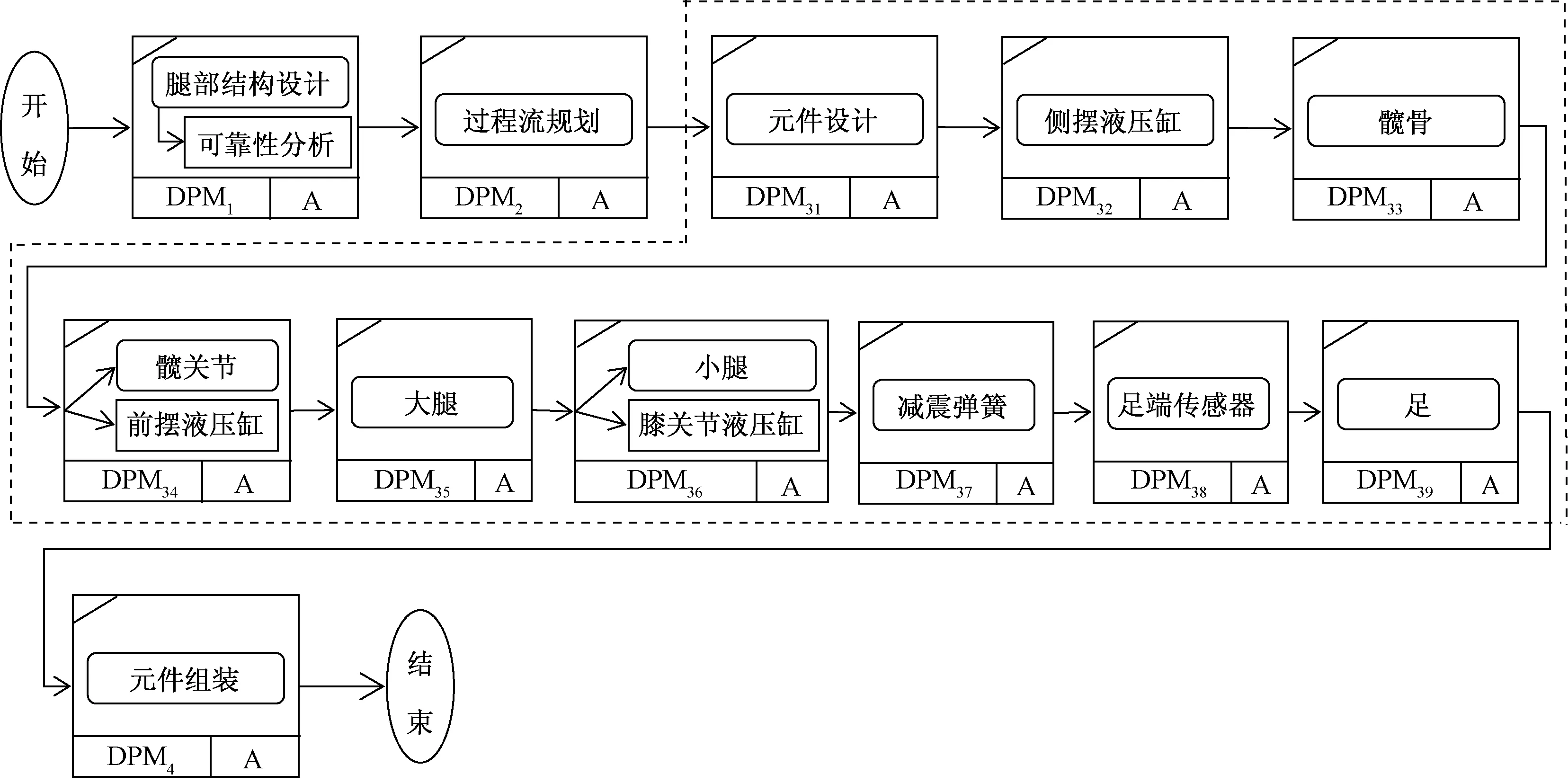
嵌套設(shè)計過程模塊(nesting design process module, NDPM)特指該設(shè)計過程模塊能被分解為子模塊,如圖3所示,由元件區(qū)、DPM序號區(qū)以及符號標志區(qū)組成。其中,NDPM區(qū)包含所有ADPM;DPM序號用表示,j=1,2,…,k(k 圖3 NDPM過程模塊Fig.3 NDPM process module 在復(fù)雜元件裝配過程中,存在大量元件交互與耦合的現(xiàn)象,根據(jù)系統(tǒng)間的關(guān)系,可劃分為層次系統(tǒng)與非層次系統(tǒng),層次系統(tǒng)的特點為子系統(tǒng)間元件信息順序流向、無耦合關(guān)系,且呈樹狀結(jié)構(gòu);非層次系統(tǒng)是不存在等級關(guān)系、子系統(tǒng)間元件信息耦合,且呈網(wǎng)狀結(jié)構(gòu)。如圖4所示,若忽略非層次系統(tǒng)中的耦合關(guān)系,可將非層次系統(tǒng)轉(zhuǎn)化為層次系統(tǒng),層次系統(tǒng)為非層次系統(tǒng)的特殊形式。在實際的產(chǎn)品元件裝配流程中,多為非層次系統(tǒng),故以非層次系統(tǒng)為研究對象。 圖4 層次系統(tǒng)與非層次系統(tǒng)Fig.4 Hierarchical system and non-hierarchical system 圖5 兩元件間信息傳遞關(guān)系Fig.5 Information transfer relationship between two components 在非層次系統(tǒng)中,兩元件間的信息關(guān)系一般分為三種,如圖5所示,其中,圖5(a)為串行關(guān)系,表示元件A和元件B具有先后依賴關(guān)系,元件B需要元件A提供輸入信息;圖5(b)為并行關(guān)系,表示元件A與元件B無必然關(guān)系,兩元件間互相獨立;圖5(c)為耦合關(guān)系,表示元件A與元件B相互影響,各元件間存在大量交互反饋,需多次迭代才能完成,耦合關(guān)系較為普遍,其中串行與并行可視為耦合關(guān)系的特例。在復(fù)雜元件的產(chǎn)品設(shè)計中,串行與并行關(guān)系的元件信息傳遞明確且易于處理,而耦合關(guān)系中元件信息的迭代與反復(fù)增加了復(fù)雜性,應(yīng)對復(fù)雜元件的產(chǎn)品設(shè)計流程進行優(yōu)化,以減少迭代次數(shù),提高設(shè)計效率。 采用設(shè)計結(jié)構(gòu)矩陣表示元件間的耦合關(guān)系,如圖6所示,將n個元件順序排列,構(gòu)成n×n的方陣,行與列對應(yīng)相同順序的元素,其中矩陣中元素的定義式為 (1) 式(1)中:當i≠j時,表示元件自身的信息耦合。 如圖6中的DSM表示:①矩陣的維數(shù)為元件個數(shù),對角線的元素為元件本身;②每一行表示元件的執(zhí)行需要其他元件的輸入信息,每一列表示元件對其他元件的輸出信息;③矩陣對角線以下的信息表示前饋信息,對角線以上為反饋信息;④通過對DSM進行變換處理,減少反饋信息造成的設(shè)計重復(fù),盡可能將反饋信息與相應(yīng)的元件接近,當DSM呈上三角時為理想的元件設(shè)計優(yōu)化,表示各元件間不存在反饋耦合關(guān)系。 圖6 設(shè)計結(jié)構(gòu)矩陣Fig.6 Design structure matrix 元件網(wǎng)絡(luò)圖可以表示為M=(O,P),O=(o1,o2,…,on)為節(jié)點集合,P=(p1,p2,…,pm)為邊集合,運用復(fù)雜元件網(wǎng)絡(luò)建模,各節(jié)點為產(chǎn)品結(jié)構(gòu)元件,邊為元件素間物理連接關(guān)系,邊的權(quán)重為傳播強度,傳播強度越大,其對應(yīng)的權(quán)重值也越大,其中復(fù)雜元件網(wǎng)絡(luò)圖可由鄰接矩陣W表示,W由元素Wij表示,其中Wij的定義式為 (2) 在鄰接矩陣W中,元素wij≥0,方向是元件受物理連接約束的指向,邊的粗細為元件間傳播強度大小,采用0~0.9數(shù)值標度法量化,數(shù)值越大表示結(jié)構(gòu)元件間關(guān)聯(lián)越強。 模糊設(shè)計結(jié)構(gòu)矩陣(fuzzy design structure matrix, FDSM)是對布爾型設(shè)計結(jié)構(gòu)矩陣的改進,其具體步驟為:①對各元素進行關(guān)聯(lián)識別;②度量元素關(guān)聯(lián)程度;③構(gòu)建FDSM實現(xiàn)模塊化;④分析關(guān)聯(lián)特性的無序FDSM確定耦合順序。在整個產(chǎn)品元件裝配過程中,結(jié)構(gòu)元件δ1,δ2,…,δn構(gòu)成論域Y,由復(fù)雜網(wǎng)絡(luò)結(jié)構(gòu)可得到模糊設(shè)計結(jié)構(gòu)矩陣W,其定義式為 (3) 模糊設(shè)計結(jié)構(gòu)矩陣建立了設(shè)計過程結(jié)構(gòu)化模型,以減少設(shè)計過程中的迭代,降低迭代風險,如圖7所示,復(fù)雜網(wǎng)絡(luò)結(jié)構(gòu)到FDSM的映射,有效地表達了結(jié)構(gòu)元件的信息關(guān)聯(lián)程度。 圖7 復(fù)雜網(wǎng)絡(luò)分析圖與FDSM映射Fig.7 Complex network analysis graph and FDSM mapping 其中,兩設(shè)計元件x與y間的耦合程度定義式為 (4) 式(4)中:n為結(jié)構(gòu)元件數(shù)量。 (5) 式(5)中:λ為截集閾值。 當λ由0~1逐漸增大時,矩陣中0元素也隨之增加,聚類程度逐漸細化,故λ決定聚類結(jié)果,如圖8所示,當聚類程度最細時,分得的結(jié)構(gòu)元件最多,成本提高,周期增長;當聚類最粗時,結(jié)構(gòu)元件間復(fù)雜程度也隨之提高,因此需依據(jù)實際情況選擇λ,以確保聚類的合理性。 圖8 模塊劃分截集閾值Fig.8 Module partitioning threshold 當在產(chǎn)品元件裝配過程中存在元件間信息依賴程度不等時,即wij≠wji,一般采用效用理論確定二者間依賴關(guān)系,其定義式為 (6) 再通過夾角余弦法則確定元素間相似系數(shù),其定義式為 (7) qij構(gòu)成的矩陣Q即為論域上的模糊相似矩陣 (8) 式(8)中:主對角線為結(jié)構(gòu)元件本身,非對角線為結(jié)構(gòu)元件間的信息交互強弱。 DPM可被逐層迭代分解為若干子模塊,以圖9為例,該產(chǎn)品元件的最高層級DPM,分為DPM1、DPM2、DPM3、DPM4、DPM5,其中DPM1與DPM5不可繼續(xù)分解,故為ADPM,而DPM3、DPM4、DPM5可繼續(xù)分解,故為NDPM,每個子模塊包含子子模塊,即DPM2(DPM21、DPM22、DPM23、DPM24),DPM3(DPM31、DPM32、DPM33),DPM4(DPM41、DPM42)。 入集出集統(tǒng)記為φⅠ0,結(jié)構(gòu)元件是DPM間信息交流渠道,其中入集φⅠ是DPM最上游的活動,出集φO是DPM最下游的活動,如圖9所示,DPM2的規(guī)模最大,以DPM2為例,其入集為φⅠ(DPM2)=3,出集為φO(DPM2)=9。 圖9 元件裝配過程模塊Fig.9 Component assembly process module 假設(shè)DPM有n個結(jié)構(gòu)元件,每個結(jié)構(gòu)元件δi∈DPM,(I=1,2,…,n)的信息輸入與輸出關(guān)聯(lián)程度分別用LⅠ(i)與LO(i)表示,確定DPM中結(jié)構(gòu)元件的信息依賴程度,其定義式為 (9) 式(9)中:LⅠ(i)為復(fù)雜網(wǎng)絡(luò)分析圖中結(jié)構(gòu)元件δi向其他元件輸入的權(quán)重之和;LO(i)為復(fù)雜網(wǎng)絡(luò)分析圖中其他結(jié)構(gòu)元件向結(jié)構(gòu)元件δi的輸入權(quán)重之和。 若Ck=min{Ci},?i=1,2,…,n,則稱δk為入集,即φⅠ(DSM)=δk,若Cl=max{Ci},?i=1,2,…,n,則稱δl為入集,即φO(DSM)=δl。 液壓四足機器人憑借其離散式的地面支撐能力,可行進于泥濘砂石、崎嶇山地以及超距溝渠等不同路面,且在星際探測、礦產(chǎn)挖掘與軍事偵察等多領(lǐng)域具備相對優(yōu)勢,因此有較強的應(yīng)用價值與發(fā)展前景。在野外的非結(jié)構(gòu)化地形中,對四足機器人的環(huán)境適應(yīng)能力要求極高,需應(yīng)對來自外界的沖擊與干擾,腿部元件設(shè)計要滿足自行蹲起和跌倒后站立等多方面能力要求,多自由度單腿元件設(shè)計作為重要的四足機器人基礎(chǔ)運動組成部分,對實現(xiàn)復(fù)雜與多變的運動起到了關(guān)鍵作用。 因機器人為新興產(chǎn)業(yè),與傳統(tǒng)產(chǎn)品結(jié)構(gòu)相比,液壓四足機器人腿部結(jié)構(gòu)較為新穎,故本文以腿部元件裝配流程為研究對象。其裝配流程規(guī)劃包括腿部結(jié)構(gòu)設(shè)計、可靠性分析、過程流規(guī)劃等15個設(shè)計活動,根據(jù)相關(guān)專家以及設(shè)計人員的分析,該結(jié)構(gòu)裝配程度為中等級別,具體腿部元件如表1所示。 表1 液壓四足機器人腿部結(jié)構(gòu)設(shè)計元件 根據(jù)相關(guān)專家與設(shè)計人員的經(jīng)驗,利用式(2)得出各腿部元件之間的相互依賴強度,用復(fù)雜網(wǎng)絡(luò)分析圖表示液壓四足機器人腿部元件間的關(guān)系,其中邊上的數(shù)值省略,如圖10所示。 圖10 液壓四足機器人腿部結(jié)構(gòu)元件復(fù)雜網(wǎng)絡(luò)分析圖Fig.10 Complex network analysis diagram of the structural components of the hydraulic quadruped robot 利用式(3)將液壓四足機器人復(fù)雜網(wǎng)絡(luò)分析圖映射為模糊設(shè)計結(jié)構(gòu)矩陣W: 基于效用理論,利用式(5)構(gòu)建FDSM結(jié)構(gòu)元件之間的依賴關(guān)系,得到液壓四足機器人腿部元件的模糊關(guān)系矩陣,采用夾角余弦法則,求得模糊相似矩陣,其中模糊等價矩陣為Q12,由結(jié)構(gòu)元件描述可知,該腿部元件為中等級別,取ω=0.5,得到Q0.5: 由表2可知DPM3的入集為元件5,出集為元件6,由于篇幅所限,采用相同的方法求得所有DPM的入出集,結(jié)果如圖11所示。即: φⅠ(DPM1)=1,φO(DPM1)=2;φⅠ(DPM2)=φO(DPM2)=3;φⅠ(DPM3)=5,φO(DPM3)=6;φⅠ(DPM4)=φO(DPM4)=15。 其中DPM3是NDPM,可繼續(xù)劃分為九個ADPM,即:DPM3=(DPM31, DPM32, DPM33, DPM34, DPM35, DPM36, DPM37, DPM38, DPM39),子模塊的入出集采用相同方法迭代,求得最終的液壓四足機器人腿部元件設(shè)計的DPM及其入出集,構(gòu)建優(yōu)化流程如圖12所示。 圖11 液壓四足機器人腿部結(jié)構(gòu)元件信息交互統(tǒng)計Fig.11 Information exchange statistics of structural components of hydraulic four-legged robot 表2 DPM3的φⅠ和φO求解過程 圖12 液壓四足機器人腿部元件裝配流程圖Fig.12 Hydraulic four-legged robot leg component assembly flow chart 由圖11可以看出,根據(jù)本文所提方法對液壓四足機器人腿部元件裝配流程進行DPM劃分,結(jié)果符合設(shè)計流程,同時DPM可清晰 達元件間的信息流向,體現(xiàn)出元件的串行、并行以及耦合關(guān)系,在液壓四足機器人腿部元件裝配的過程中,基于DPM進行裝配過程的規(guī)劃與管理,從而確定對元件的優(yōu)化執(zhí)行順序,降低過程中的反復(fù)與迭代,縮短了新產(chǎn)品新產(chǎn)品設(shè)計周期。 從元件信息流角度將元件裝配過程分解為DPM,便于設(shè)計人員對復(fù)雜系統(tǒng)進行分析與規(guī)劃管理,得到以下結(jié)論。 (1)將復(fù)雜網(wǎng)絡(luò)分析圖與模糊設(shè)計結(jié)構(gòu)矩陣進行耦合,實現(xiàn)對元件間信息流依賴關(guān)系的定量化表達。 (2)基于效用理論對DPM進行劃分,為元件裝配流程的優(yōu)化提供支持,避免了傳統(tǒng)模塊間關(guān)聯(lián)松散的缺點,降低了元件間的反復(fù)迭代,對執(zhí)行順序進行合理規(guī)劃,具有良好的應(yīng)用價值。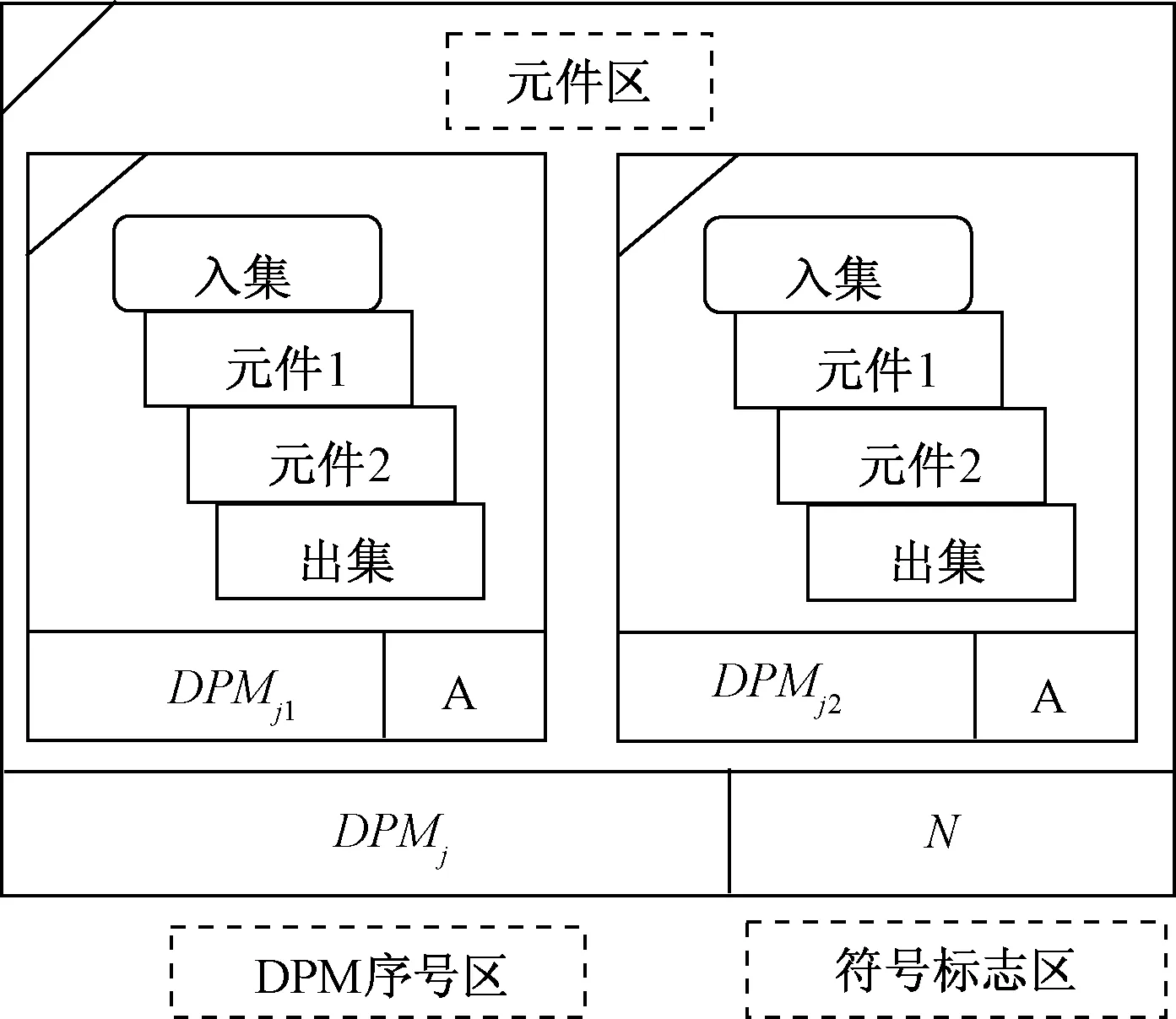
2 復(fù)雜元件網(wǎng)絡(luò)建模及模塊聚類
2.1 元件設(shè)計建模

2.2 元件網(wǎng)絡(luò)建模
2.3 元件模塊聚類
3 復(fù)雜元件裝配流程規(guī)劃
4 案例分析

5 結(jié)論
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
中外會展(2014年4期)2014-11-27 07:46:46
舒適廣告(2008年9期)2008-09-22 10:02:48