基于激光測距的便攜式汽車無線充電系統
2020-04-20 11:06:57汝玉星丁佳新丁澤瑩田小建鄧軍
時代汽車 2020年3期
汝玉星 丁佳新 丁澤瑩 田小建 鄧軍
摘 要:無線充電是現階段發展快速的充電模式,為了提高不良環境下電動汽車的充電效率,本文提出一種基于激光測距的便攜式汽車無線充電系統。以電動汽車為模型,利用激光測距進行距離信息估計,找到最佳距離以提高充電效率。在電路設計的基礎上,采用電機控制模塊、激光測距模塊、整流濾波電路模塊、降壓電路模塊、高頻逆變電路模塊、反饋電路模塊等,并對未來基于激光測距的無線充電技術進行了總結和展望。
關鍵詞:激光測距;無線充電;萬向調平
1 引言
研究電動汽車的無線供電,不僅要研究如何為汽車供電,還要研究如何最大效率完成充電。無線充電可分為小功率無線充電和大功率無線充電,大部分的電動汽車使用大功率無線充電。自1890年,在偉大的物理學家特斯拉開始進行無線傳輸試驗后,后人就開始了無線傳輸的研究。2007年,麻省理工學院的一個研究小組實現了電力的無線傳導。汽車無線充電可以避免繁雜的充電線帶來的困擾,實現隨時充電,攜帶方便的功能。
本文研究自適應電動汽車無線供電移動平臺,利用激光測距技術解決了對于在某些不良環境下不能滿足與車底保持平行的問題。這樣就基本滿足無論汽車所在的路面是否平整,都可以滿足高效率充電。
2 無線充電
汽車無線充電技術利用電磁耦合,利用兩個電路之間存在互感的關系,通過一個電路的電流產生變化來影響另外一個電路,以此來達到無線傳輸。無線充電系統包含兩個部分,分別為發射部分和接收部分。以電動汽車為例,發射部分位于便攜式充電裝置上,接收部分位于電動汽車的底部。便攜式充電裝置的發射部分接入電源,通過設計電路,經過一系列電能的轉化和傳輸,最終在發射部分形成高頻的交流電,交流電以此產生交變的磁場,并在汽車底部的接收線圈端感應出交流電流,最終經過整流產生直流電流來給電動汽車充電。
3 萬向調平裝置的設計
3.1 總體結構的概述和設計
如下圖所示:
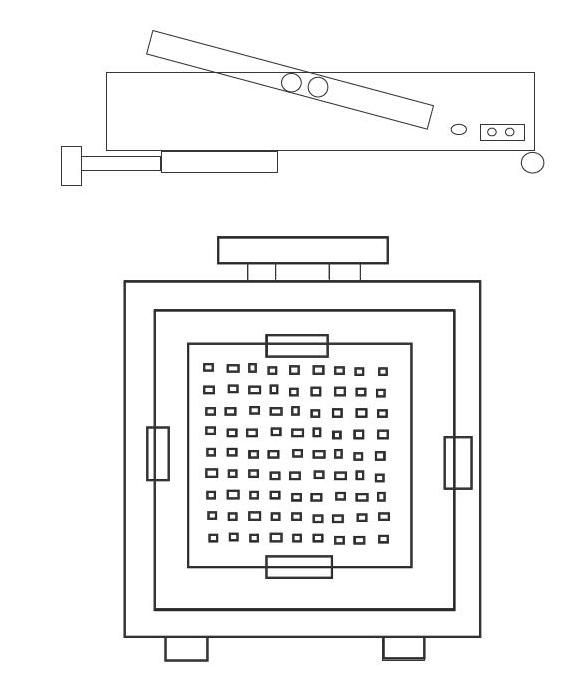
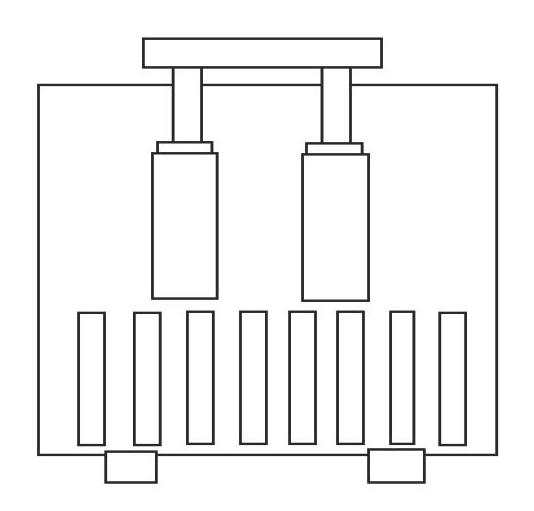
3.2 內旋殼、外旋殼的設計
外環殼體是嵌在裝置底座中的空心扁方環柱體結構,內旋轉殼體是嵌在外環殼體內部的扁方柱體結構,外環殼體和內旋轉殼體高度相同,且初始狀態時上表面共面,內旋轉殼體的上表面形狀為正方形,下表面的外圍形狀、周長均與上表面的相同,但中心為圓形鏤空,鏤空位置正下方裝有風扇;外環殼體的兩個相對的外側面的中心處有參數相同的第一承重旋轉軸和第二承重旋轉軸,第一承重旋轉軸和第二承重旋轉軸能夠帶動外環殼體在裝置底座中旋轉,內旋轉殼體的兩個相對的外側面的中心處有參數相同的第三承重旋轉軸和第四承重旋轉軸,第三承重旋轉軸和第四承重旋轉軸能夠帶動內旋轉殼體在外環殼體中旋轉,第一承重旋轉軸和第二承重旋轉軸的中心軸線在一條直線上,所在直線記為直線A,第三承重旋轉軸和第四承重旋轉軸的中心軸線在另一條直線上,所在直線記為直線B,直線A與直線B垂直相交;在外環殼體的上表面有第一激光測距模塊、第二激光測距模塊,內旋轉殼體的上表面有第三激光測距模塊、第四激光測距模塊;其中第一激光測距模塊和第二激光測距模塊的參數相同,它們的中心連線記為直線C,直線C與直線A垂直;第三激光測距和第四激光測距模塊的參數相同,它們的中心連線記為直線D,直線D與直線B垂直;內旋轉殼體的上表面和裝置底座的下表面均有散熱孔;所述的市電接口和工作指示燈位于裝置底座的外側面,無線電能發射線圈位于內旋轉殼體的內部且其上表面與內旋轉殼體的上表面平行且中心重合。內外嵌套雙旋轉的結構,可以實現萬向調節功能。其詳細結構如下圖所示:
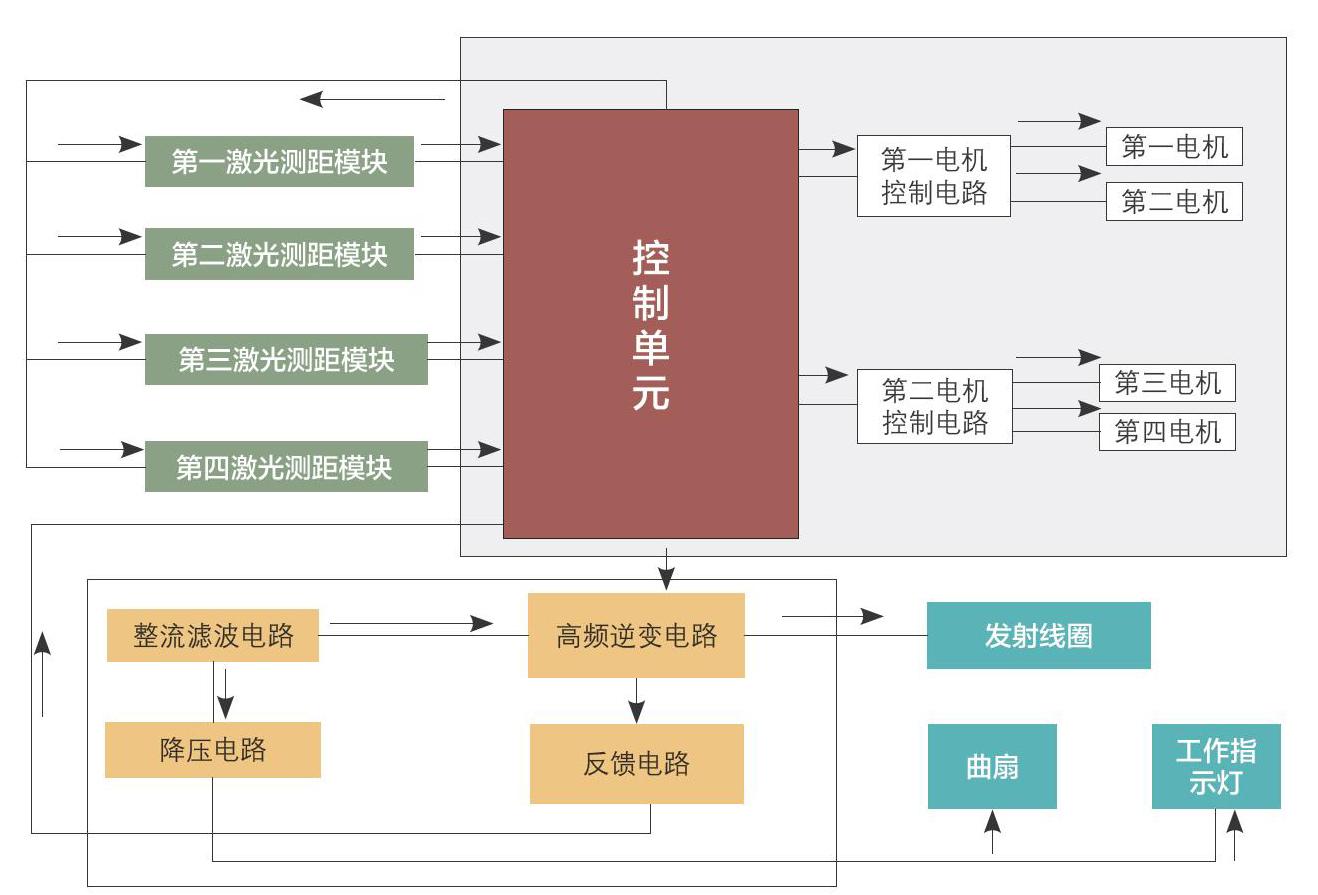
3.3 控制單元的設計
控制單元的設計目標是平臺通電以后,控制單元同時給四個激光測距模塊輸出驅動方波信號,位于外環殼體上的第一激光測距模塊、第二激光測距模塊收到驅動信號后,兩激光發射探頭同時發出光束信號,在由各自模塊中的接收探頭接收反射光束信號,兩信號經過放大、脈沖整形、帶通濾波,最終由模塊輸出到控制單元。輸入到控制單元中的兩信號經過時間測算等運算處理后,在控制單元與第一電機控制電路相連的I/O口上得到四個不同的信號,進而控制第一電機、第二電機的正傳、反轉、停轉。
4 激光測距模塊的設計
如果平臺初始狀態就與車底面平行時,即這對激光測距模塊的激光頭表面到達車底面距離相等時,控制單元的I/O口輸出00狀態,進而負責帶動第一承重旋轉軸和第二承重旋轉軸的第一電機、第二電機不工作;當第一激光測距模塊的激光頭表面到達車底面距離大于第二激光測距模塊的激光頭表面到達車底面距離時,該I/O口輸出01狀態,第一電機控制電路接到信號后,控制第一電機、第二電機正轉,進而第一電機、第二電機負責帶動的第一承重旋轉軸和第二承重旋轉軸正轉工作,直到這對激光測距模塊激光頭表面到達車底面距離相等時,I/O口輸出00狀態,第一電機、第二電機帶動第一承重旋轉軸和第二承重旋轉軸停轉;當第二激光測距模的激光頭表面到達車底面距離大于第一激光測距模的激光頭表面到達車底面距離時,該I/O口輸出10狀態,第一電機控制電路接到信號后,第一電機、第二電機反轉,進而帶動第一承重旋轉軸和第二承重旋轉軸反轉工作,直到對激光測距模塊激光頭表面到達車底面距離相等時,I/O口輸出00狀態,第一電機、第二電機帶動第一承重旋轉軸和第二承重旋轉軸停轉;通過上述工作過程,本發明平臺就實現了外環殼體水平角度的變化,也就實現了內旋轉殼體跟隨外環殼體的一次水平角度變化。
5 外觀的設計
采用的是無線可移的拉箱式結構,這樣可以使得本發明便攜靈活能應付各種環境。其詳細結構如下圖所示:
6 總結與未來
為解決不良環境下給電動汽車進行充電時,存在的充電效率較低的問題,在基于激光測距的基礎上開發了便攜式汽車無線充電裝置,以此來提高電動汽車的充電效率。首先設計出總體結構模型,采用內外嵌套雙旋轉的結構,可以實現萬向調節功能,大大提升裝置的電能傳輸效率;采用激光測距方式來測量距離,確保其精確度;發射線圈采用蜂房式的繞制方式,可以有效抑制線圈寄生電容。除此之外,外觀上采用的是無線可移的拉箱式結構,這樣可以使得本發明便攜靈活能應付各種環境。與傳統的充電方式相對比,所提出的系統在電動汽車的充電效率以及適用的環境條件方面具有明顯的優越性。未來將繼續對基于激光測距的便攜式汽車充電系統進行研究,爭取進一步對該系統進行優化。
課題:長春市技術創新中心資助項目“長春市電動汽車無線充電技術創新中心”,編號18CX001。
參考文獻:
[1]李忠寶,劉寶松,劉月浩.基于激光測距技術的往復車精準定位應用.電工技術,2019年第24期.
