基于試驗(yàn)點(diǎn)自動(dòng)識別的飛行試驗(yàn)智能化監(jiān)控技術(shù)
2020-04-19 07:26:04劉升護(hù)
計(jì)算機(jī)應(yīng)用與軟件 2020年4期
劉升護(hù) 王 鵬 葉 冰
(中國飛行試驗(yàn)研究院 陜西 西安 710089)
0 引 言
在飛行試驗(yàn)中,實(shí)時(shí)監(jiān)控是保證試飛安全的重要手段。隨著型號任務(wù)的增多以及實(shí)時(shí)監(jiān)控技術(shù)的不斷發(fā)展,實(shí)時(shí)監(jiān)控在保障試飛安全和提高試飛效率方面發(fā)揮的作用也愈加重要。例如,智能化安全監(jiān)控通過設(shè)置試驗(yàn)參數(shù)告警門限值及輔助決策信息,實(shí)現(xiàn)對影響試驗(yàn)機(jī)安全的重要參數(shù)進(jìn)行監(jiān)控,保證在故障發(fā)生后能夠及時(shí)告警及彈出輔助決策信息供指揮員處置故障。但是,隨著飛行任務(wù)的不斷增多,安全監(jiān)控已經(jīng)不能滿足型號試飛需求,實(shí)現(xiàn)對試驗(yàn)任務(wù)的智能監(jiān)控是當(dāng)前面臨的主要問題。
現(xiàn)有的對試驗(yàn)任務(wù)實(shí)時(shí)監(jiān)控方式主要是試飛工程師通過人工監(jiān)測關(guān)鍵參數(shù),依據(jù)個(gè)人知識和經(jīng)驗(yàn)進(jìn)行分析、識別、判斷以及評價(jià)試驗(yàn)點(diǎn)完成情況,存在周期長、效率不高等缺點(diǎn)。由于部分試驗(yàn)機(jī)存在架次多、留空時(shí)間長、考核試驗(yàn)點(diǎn)多等特點(diǎn),給試飛工程師帶來了巨大的壓力和工作量,嚴(yán)重影響了型號試飛進(jìn)度。因此需要研究一種面向試驗(yàn)任務(wù)的智能化監(jiān)控技術(shù)。本文通過研究試驗(yàn)機(jī)各科目試驗(yàn)點(diǎn)特征,研究判定試驗(yàn)點(diǎn)識別的關(guān)鍵參數(shù)及其變化規(guī)律,建立基于試驗(yàn)點(diǎn)的試驗(yàn)機(jī)試飛知識數(shù)據(jù)庫[1],設(shè)計(jì)試飛實(shí)時(shí)監(jiān)控試驗(yàn)點(diǎn)自動(dòng)識別算法,實(shí)現(xiàn)基于試驗(yàn)點(diǎn)的智能化綜合監(jiān)控,提升試驗(yàn)機(jī)監(jiān)控效率,保證型號試飛任務(wù)的快速推進(jìn)。
1 試驗(yàn)點(diǎn)知識庫搭建
1.1 試驗(yàn)點(diǎn)
試驗(yàn)點(diǎn)作為飛行試驗(yàn)任務(wù)的最小組成單元,明確了試驗(yàn)機(jī)所要完成的任務(wù)及要求,是飛行效果評估的主要依據(jù),主要包含科目名稱、動(dòng)作名稱、試驗(yàn)?zāi)康摹y試參數(shù)、試飛方法、動(dòng)作有效性判定、數(shù)據(jù)分析和處理流程、結(jié)果形式等內(nèi)容。
在飛行試驗(yàn)準(zhǔn)備階段,試飛工程師將本次飛行中涉及到的試驗(yàn)點(diǎn)一一列出,并制作成試飛任務(wù)單。在飛行過程中,飛行員根據(jù)試飛任務(wù)單中所規(guī)定的內(nèi)容,完成各個(gè)試驗(yàn)點(diǎn)的試驗(yàn)任務(wù)。同時(shí)試飛工程師監(jiān)控大廳實(shí)時(shí)關(guān)注飛機(jī)狀態(tài),從各種數(shù)據(jù)中獲取試驗(yàn)點(diǎn)執(zhí)行情況,并根據(jù)相關(guān)計(jì)算方法,快速評價(jià)試驗(yàn)點(diǎn)執(zhí)行效果,并及時(shí)反饋給飛行員,從而有效地提升試飛效率。
1.2 試驗(yàn)點(diǎn)識別方式
人工識別試驗(yàn)點(diǎn)存在諸多弊端,不能夠精準(zhǔn)地識別試驗(yàn)點(diǎn)的起始與結(jié)束,從而給后續(xù)試驗(yàn)點(diǎn)的快速評估帶來了不確定性,特別是某些需要深度計(jì)算的試驗(yàn)點(diǎn),細(xì)微的差別即會(huì)產(chǎn)生巨大的計(jì)算結(jié)果差異,因此需要一種能夠自動(dòng)識別試驗(yàn)點(diǎn)的方法。試驗(yàn)點(diǎn)的識別主要是對試驗(yàn)點(diǎn)動(dòng)作狀態(tài)及參數(shù)的識別,難點(diǎn)在于動(dòng)作狀態(tài)識別。根據(jù)試驗(yàn)點(diǎn)所涉及的動(dòng)作特點(diǎn),可將試驗(yàn)點(diǎn)分為三類[2-4]:
1) 基礎(chǔ)動(dòng)作:可使用幾個(gè)關(guān)鍵參數(shù)變化特征確定,如平飛、盤旋、爬升等動(dòng)作。
2) 組合動(dòng)作:幾個(gè)基礎(chǔ)動(dòng)作依次組合而成,如滑跑起飛、平飛加減速等動(dòng)作。
3) 復(fù)雜動(dòng)作:過程比較復(fù)雜,難以找出固定規(guī)律,這類動(dòng)作主要以隨機(jī)任務(wù)為導(dǎo)向,飛行員根據(jù)具體情況視情而定,如S形機(jī)動(dòng)、回避區(qū)等試驗(yàn)點(diǎn)。
從這三種分類可以看出,基礎(chǔ)動(dòng)作和組合動(dòng)作是可量化動(dòng)作,可根據(jù)動(dòng)作特征,提取關(guān)鍵參數(shù)及通用的變化規(guī)律,有利于試驗(yàn)點(diǎn)的自動(dòng)識別;復(fù)雜動(dòng)作由于難以提取通用的變化規(guī)律,屬于不可量化試驗(yàn)點(diǎn)。在實(shí)際飛行試驗(yàn)中,所有試驗(yàn)點(diǎn)涉及到的基礎(chǔ)動(dòng)作和組合動(dòng)作大約占到總試驗(yàn)點(diǎn)的90%。由于本課題主要目的是減輕試飛工程師工作量,因此主要研究對基礎(chǔ)動(dòng)作和組合動(dòng)作的識別。由于組合動(dòng)作是基礎(chǔ)動(dòng)作的組合,因此對基礎(chǔ)動(dòng)作的識別是本文研究的主要內(nèi)容。
1.3 試驗(yàn)點(diǎn)關(guān)鍵參數(shù)提取
表1給出了某幾個(gè)常用的基礎(chǔ)動(dòng)作,根據(jù)歸納、總結(jié),可將這些動(dòng)作的各個(gè)判定條件歸為以下幾類:
1) 在某一時(shí)間段內(nèi),參數(shù)偏差大于或小于給定值;
2) 在某一時(shí)間段內(nèi),參數(shù)值小于或大于給定值;
3) 在某一時(shí)間段內(nèi),參數(shù)偏差幅度小于給定值;
4) 在某一時(shí)間段內(nèi),參數(shù)值呈規(guī)律性變化,如逐漸增大或減小;
5) 在某一時(shí)間段內(nèi),參數(shù)為一定值。
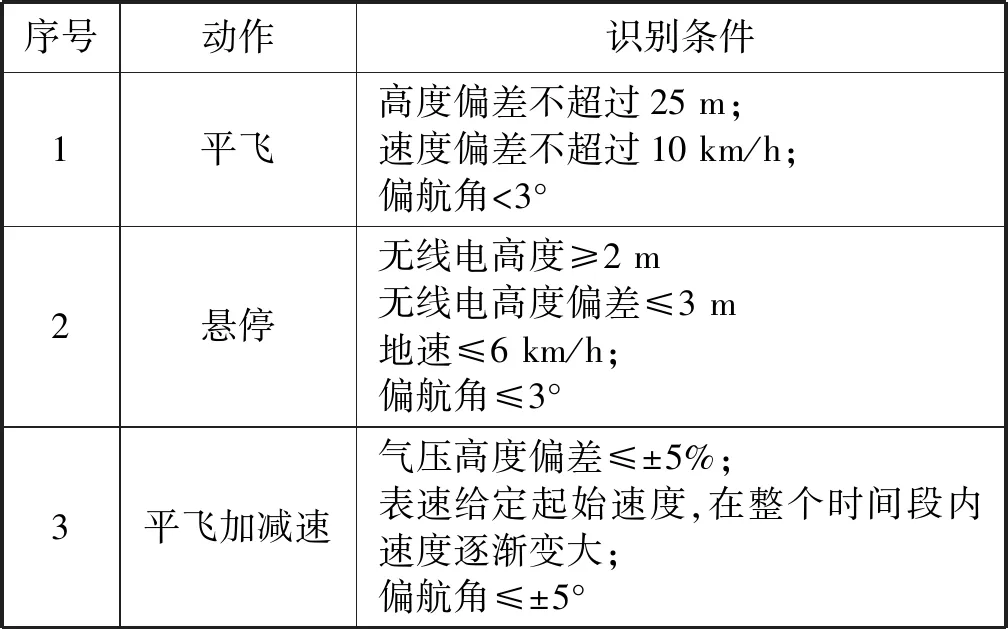
表1 部分試驗(yàn)動(dòng)作識別條件
根據(jù)飛行的實(shí)際條件,存在的設(shè)計(jì)難點(diǎn)是實(shí)際飛行動(dòng)作點(diǎn)條件的不確定性。傳統(tǒng)實(shí)時(shí)監(jiān)控主要是對實(shí)時(shí)參數(shù)進(jìn)行計(jì)算,同一參數(shù)當(dāng)前數(shù)值和歷史數(shù)值沒有關(guān)聯(lián)。而要識別試驗(yàn)點(diǎn)就需要將當(dāng)前數(shù)據(jù)與歷史數(shù)據(jù)進(jìn)行關(guān)聯(lián)分析,分析這些參數(shù)在一段時(shí)間內(nèi)的變化規(guī)律。根據(jù)分析,總結(jié)出以下幾條規(guī)則:
1) 偏差不大于(數(shù)值);
2) 偏差不小于(數(shù)值);
3) 不大于;
4) 不小于;
5) 偏差不大于(百分比);
6) 偏差不小于(百分比);
7) 逐漸增大;
8) 逐漸變小;
9) 等于。
其中,3)、4)、9)可采用瞬時(shí)數(shù)據(jù)進(jìn)行判斷,其他幾項(xiàng)均需要關(guān)聯(lián)歷史數(shù)據(jù),才能確定是否成立。
1.4 試驗(yàn)點(diǎn)知識表示
在提取試驗(yàn)點(diǎn)關(guān)鍵參數(shù)和規(guī)律后,需要對這些試驗(yàn)知識進(jìn)行有規(guī)則的管理,以便在后續(xù)試驗(yàn)點(diǎn)識別與評價(jià)中使用。為此專門設(shè)計(jì)了試驗(yàn)點(diǎn)知識數(shù)據(jù)庫,用于存儲試驗(yàn)點(diǎn)識別與評價(jià)的相關(guān)知識。因此試驗(yàn)點(diǎn)識別知識可分成若干條獨(dú)立的識別信息,每條信息按照參數(shù)名稱、參數(shù)符號、約束條件及約束值四個(gè)要素描述。表1所示的動(dòng)作1試驗(yàn)點(diǎn)的四條識別信息如表2所示。
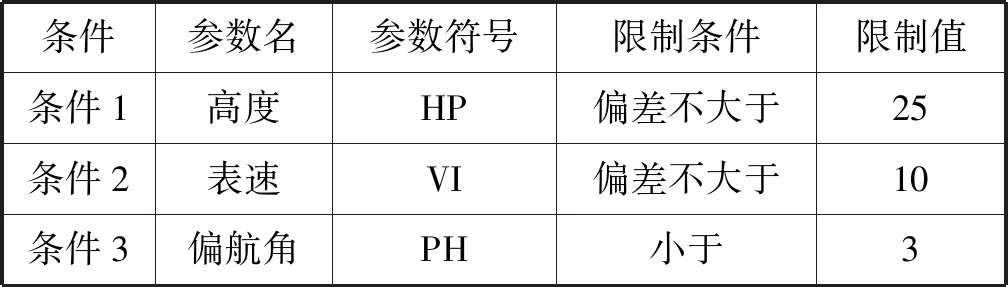
表2 平飛識別條件
為了能夠在數(shù)據(jù)庫中存儲,可對這四個(gè)要素進(jìn)行重新整合,整合后的表達(dá)方式為:
參數(shù)名:高度#表速#偏航角。
參數(shù)符號:HP#VI#PH。
限制條件:偏差不大于#偏差不大于#小于。
限制值:25#10#3。
可見重新整合后的表達(dá)方式能夠有效節(jié)省占用數(shù)據(jù)庫大小。
此外,對于多個(gè)動(dòng)作組合的試驗(yàn)點(diǎn)表達(dá)方式相對簡單些,如滑跑起飛可表示為“滑跑#起飛”,可清楚地表示出滑跑在前,起飛在后。
1.5 試驗(yàn)點(diǎn)知識數(shù)據(jù)庫設(shè)計(jì)
試驗(yàn)點(diǎn)知識庫不僅要包含試驗(yàn)點(diǎn)知識信息,還需要包含一些用于管理試驗(yàn)點(diǎn)的其他信息,如任務(wù)單、型號、課題、監(jiān)控參數(shù)等。如圖1所示,試驗(yàn)點(diǎn)知識數(shù)據(jù)庫主要包括任務(wù)單表、型號表、課題表、監(jiān)控參數(shù)表、試驗(yàn)點(diǎn)表以及用戶表。
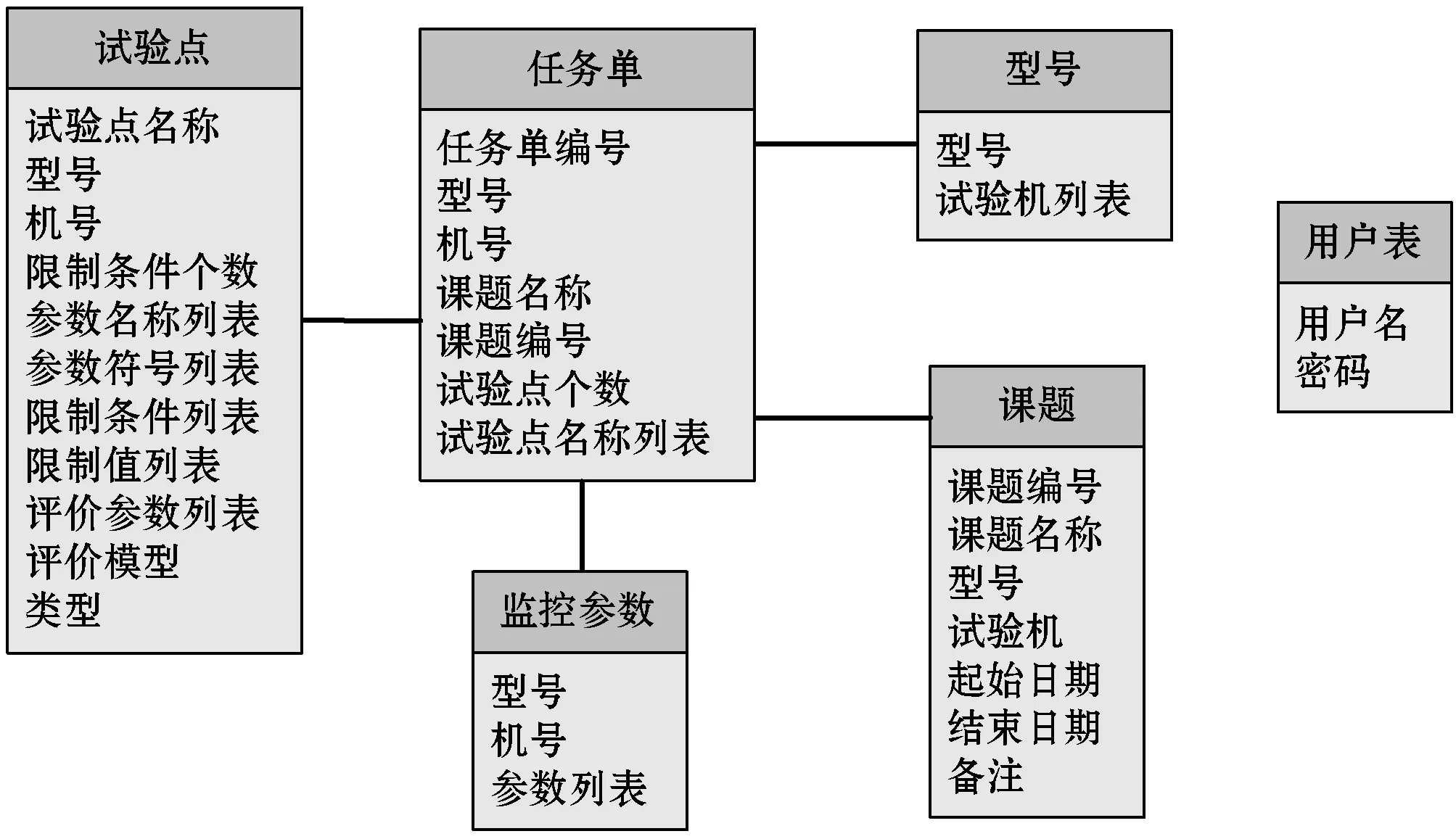
圖1 試驗(yàn)點(diǎn)知識數(shù)據(jù)庫結(jié)構(gòu)
任務(wù)單表用于儲存本次飛行的任務(wù)單信息,試飛任務(wù)單是試驗(yàn)機(jī)執(zhí)行任務(wù)的依據(jù),規(guī)定了試驗(yàn)機(jī)在每一次任務(wù)執(zhí)行過程中的各項(xiàng)要求、限制和試驗(yàn)點(diǎn)。每個(gè)任務(wù)單存在唯一的編號,并且對應(yīng)特定的飛行架次,因此,我們使用試飛任務(wù)單作為試驗(yàn)點(diǎn)知識信息與實(shí)時(shí)監(jiān)控軟件的紐帶,和聯(lián)系知識數(shù)據(jù)庫與實(shí)時(shí)監(jiān)控軟件的媒介。此外,由于同一型號的試驗(yàn)機(jī)在整個(gè)試飛過程中涉及到的試驗(yàn)點(diǎn)有成百上千個(gè),而一個(gè)飛行架次涉及到的試驗(yàn)點(diǎn)也就十來個(gè),因此每次飛行前需要試飛工程師選擇本次飛行所需要識別的試驗(yàn)點(diǎn),以便提高系統(tǒng)效率,減少無效的運(yùn)算,而試飛任務(wù)單能夠很好地實(shí)現(xiàn)這一功能。
型號表和課題表主要用于試驗(yàn)點(diǎn)的管理。監(jiān)控參數(shù)表用于保存該型號飛機(jī)所有試驗(yàn)點(diǎn)所涉及到的所有監(jiān)控參數(shù),在監(jiān)控系統(tǒng)中可獲取這些監(jiān)控參數(shù)的數(shù)值。
試驗(yàn)點(diǎn)表主要用于存儲試驗(yàn)點(diǎn)的相關(guān)信息,如型號、機(jī)號、限制條件、參數(shù)名稱等信息。由于根據(jù)試飛工程師的個(gè)人經(jīng)驗(yàn),對每個(gè)試驗(yàn)點(diǎn)的識別與評價(jià)有著不一樣的識別與評價(jià)方法,給系統(tǒng)設(shè)計(jì)帶來了一定的難度,因此我們經(jīng)過長時(shí)間的收集、討論,形成了標(biāo)準(zhǔn)試驗(yàn)點(diǎn)。同時(shí)為了滿足一些特殊科目的需求,系統(tǒng)允許試飛工程師對標(biāo)準(zhǔn)試驗(yàn)點(diǎn)進(jìn)行修改,以生成個(gè)人私有試驗(yàn)點(diǎn),從而實(shí)現(xiàn)試驗(yàn)點(diǎn)庫的多樣性。
用戶表主要包含用戶名和密碼,用于管理用戶賬戶信息。
2 系統(tǒng)架構(gòu)設(shè)計(jì)
2.1 工作流程
系統(tǒng)采用C/S結(jié)構(gòu),服務(wù)器端為試驗(yàn)點(diǎn)知識數(shù)據(jù)庫,用于保存試驗(yàn)機(jī)的試驗(yàn)點(diǎn)信息;客戶端為試驗(yàn)點(diǎn)知識數(shù)據(jù)庫管理軟件和智能識別與評估軟件。通過連接知識數(shù)據(jù)庫,試驗(yàn)點(diǎn)知識數(shù)據(jù)庫管理軟件可配置試驗(yàn)點(diǎn)知識信息,智能識別與評估軟件可獲取試驗(yàn)機(jī)該架次飛行所涉及的試驗(yàn)點(diǎn)的識別信息和評估信息,并匹配實(shí)時(shí)數(shù)據(jù),實(shí)現(xiàn)試驗(yàn)點(diǎn)的智能識別[5-6]。系統(tǒng)架構(gòu)如圖2所示。
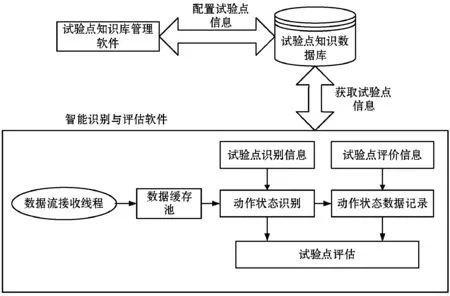
圖2 系統(tǒng)工作流程
2.2 功能模塊
系統(tǒng)按照功能劃分可分為試驗(yàn)點(diǎn)知識庫管理軟件和智能識別與評估軟件,各子軟件由多個(gè)功能模塊組成,系統(tǒng)組成如圖3所示。
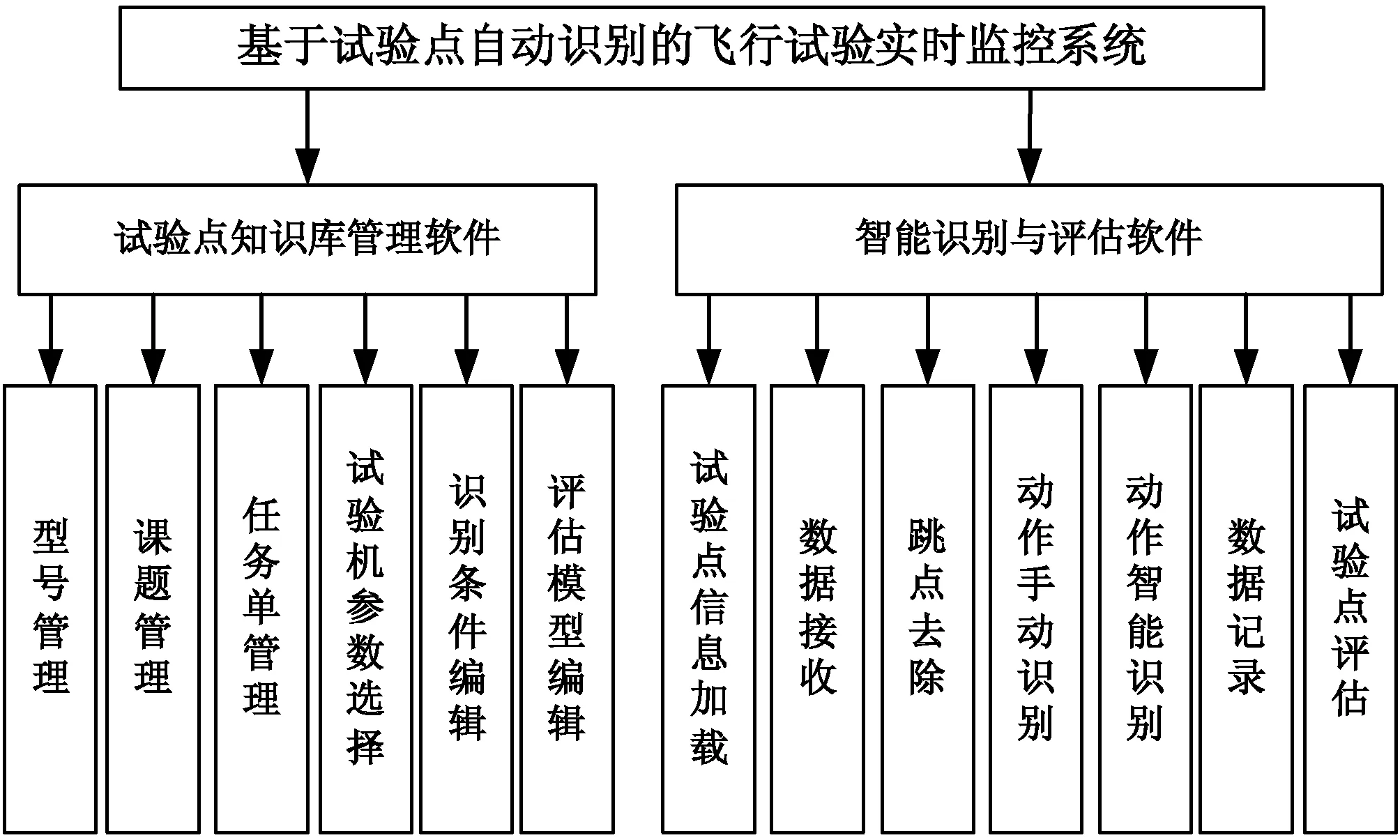
圖3 系統(tǒng)組成框圖
試驗(yàn)點(diǎn)知識庫管理軟件主要完成試驗(yàn)機(jī)的各類數(shù)據(jù)的管理。包括對試驗(yàn)機(jī)型號、課題、監(jiān)控參數(shù)、識別條件等信息的管理,并使用數(shù)據(jù)庫存儲,為實(shí)時(shí)監(jiān)控階段的試驗(yàn)點(diǎn)智能識別與評估做好充分準(zhǔn)備。該軟件由6個(gè)功能模塊組成,各模塊實(shí)現(xiàn)的功能如下:
1) 型號管理模塊:將各個(gè)試驗(yàn)機(jī)以型號歸類,為后續(xù)各個(gè)模塊的管理奠定基礎(chǔ)。
2) 課題管理模塊:對各個(gè)型號所涉及的課題統(tǒng)一管理,課題信息包括:課題名稱、課題代號、課題開始結(jié)束日期、課題所涉及的試驗(yàn)機(jī)等信息。
3) 任務(wù)單管理模塊:管理每個(gè)飛行架次的電子任務(wù)單,在后續(xù)試驗(yàn)點(diǎn)智能識別與評估方面都必須通過加載任務(wù)單獲取相關(guān)信息。
4) 參數(shù)選擇模塊:從飛機(jī)遙測參數(shù)文件中選取需要監(jiān)控的參數(shù),該參數(shù)為機(jī)載采集遙測的原始數(shù)據(jù),包含了后續(xù)試驗(yàn)點(diǎn)智能識別與效果評估所需要的所有參數(shù)。
5) 識別條件編輯模塊:編輯各個(gè)試驗(yàn)機(jī)動(dòng)作狀態(tài)判定所需信息,包括動(dòng)作名稱、動(dòng)作設(shè)計(jì)參數(shù)名稱、參數(shù)符號、限制條件及限制參數(shù)值等。根據(jù)每個(gè)試驗(yàn)即動(dòng)作的識別條件不一致,用戶可自主編輯條件,相同參數(shù)可增加多個(gè)條件。軟件界面如圖4所示。

圖4 試驗(yàn)點(diǎn)知識編輯界面
6) 評估模型編輯模塊:通過試驗(yàn)點(diǎn)模型生成模板(VC動(dòng)態(tài)庫程序)生成評價(jià)模型(dll文件),該文件包含了對試驗(yàn)點(diǎn)動(dòng)作識別之后的記錄數(shù)據(jù)進(jìn)行的所有運(yùn)算及結(jié)果,評估模型編輯模塊實(shí)現(xiàn)了對該評價(jià)模型及其相關(guān)參數(shù)的加載,為實(shí)時(shí)階段的任務(wù)評估奠定基礎(chǔ)。
智能識別與評估軟件主要完成實(shí)時(shí)監(jiān)控階段試驗(yàn)點(diǎn)智能識別和對試驗(yàn)點(diǎn)進(jìn)行快速評估,軟件界面如圖5所示,右半部分為安全監(jiān)控模塊,左半部分為智能試驗(yàn)點(diǎn)識別與評估模塊。
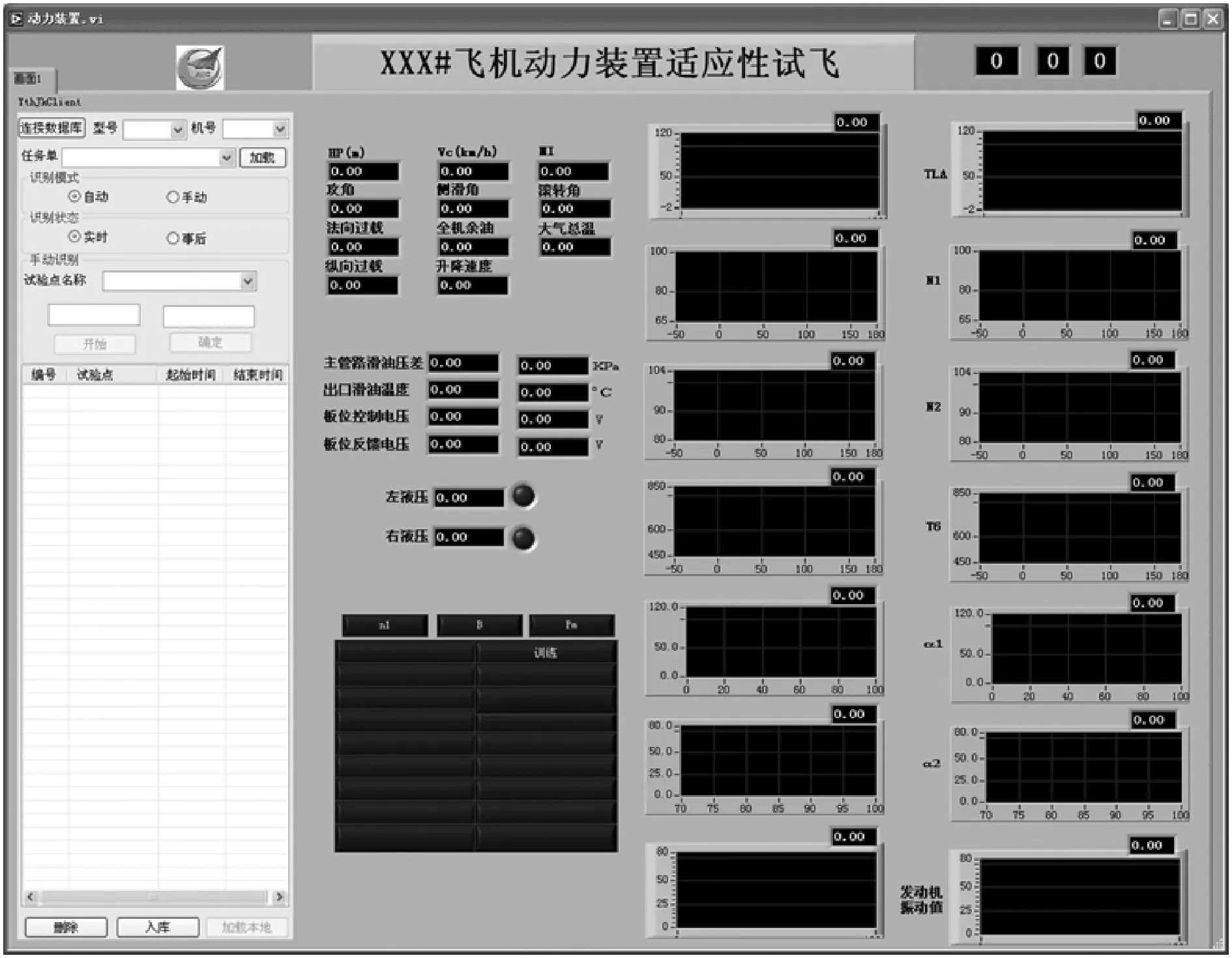
圖5 試驗(yàn)點(diǎn)自動(dòng)識別與評價(jià)軟件
該軟件由7個(gè)功能模塊組成,各模塊實(shí)現(xiàn)的功能如下:
1) 試驗(yàn)點(diǎn)信息加載模塊:通過選擇相應(yīng)的任務(wù)單,獲取本次飛行涉及到的試驗(yàn)點(diǎn)、試驗(yàn)信息、識別條件、監(jiān)控參數(shù)及評估條件等。
2) 數(shù)據(jù)接收模塊:從數(shù)據(jù)分發(fā)軟件獲取本次飛行所要監(jiān)控的關(guān)鍵參數(shù)值。
3) 跳點(diǎn)去除模塊:對接收到的實(shí)時(shí)數(shù)據(jù)進(jìn)行有效性判斷、剔除由于遙測信號不好情況下的錯(cuò)誤數(shù)據(jù),為后續(xù)智能試驗(yàn)點(diǎn)的智能識別奠定良好的基礎(chǔ)。
4) 動(dòng)作手動(dòng)識別模塊:在手動(dòng)模式下,試飛工程師采用人為的方式記錄試驗(yàn)點(diǎn)起始和結(jié)束時(shí)間。
5) 動(dòng)作智能識別模塊:通過將實(shí)時(shí)數(shù)據(jù)與試驗(yàn)點(diǎn)識別條件相匹配,智能判定出試驗(yàn)點(diǎn)執(zhí)行的起始和結(jié)束時(shí)間。
6) 數(shù)據(jù)記錄模塊:記錄識別到的試驗(yàn)點(diǎn)起始和結(jié)束時(shí)間段內(nèi)的數(shù)據(jù),并將最終的有效數(shù)據(jù)備份至數(shù)據(jù)服務(wù)器。
7) 試驗(yàn)點(diǎn)評估模塊:根據(jù)識別到的試驗(yàn)點(diǎn)時(shí)間段及相應(yīng)的記錄數(shù)據(jù),結(jié)合數(shù)據(jù)評估條件,對試驗(yàn)點(diǎn)的執(zhí)行情況作出快速評估。
3 試驗(yàn)點(diǎn)自動(dòng)識別
3.1 識別流程
為了便于驗(yàn)證基于知識識別飛行動(dòng)作的有效性, 飛行動(dòng)作識別推理機(jī)采用數(shù)據(jù)驅(qū)動(dòng)策略的正向精確推理,如圖6所示[7-9]。
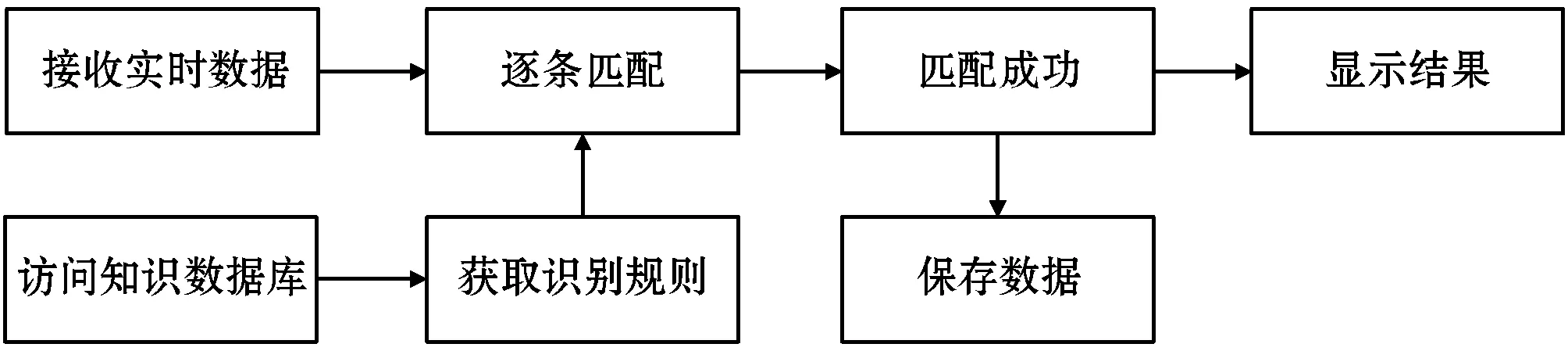
圖6 試驗(yàn)點(diǎn)識別流程圖
推理步驟如下:
1) 訪問知識數(shù)據(jù)庫,獲取試驗(yàn)點(diǎn)知識,逐幀讀入飛行數(shù)據(jù);
2) 推理機(jī)對知識庫中的每一條規(guī)則進(jìn)行匹配;
3) 匹配成功,將飛行動(dòng)作的名稱、完成時(shí)間和相關(guān)的飛行參數(shù)輸出到計(jì)算機(jī)屏幕,并保存該段時(shí)間內(nèi)的數(shù)據(jù)。
3.2 識別策略
為確保試驗(yàn)點(diǎn)的識別準(zhǔn)確可靠,設(shè)立了一些匹配策略:
1) 連續(xù)匹配失敗N(N=采樣率/2)次,則判斷該動(dòng)作已結(jié)束;
2) 遙測信號中斷3秒,則該動(dòng)作判斷終止;
3) 組合動(dòng)作之間間隔不超過15秒。
3.3 算法流程
識別過程流程圖如圖7所示。
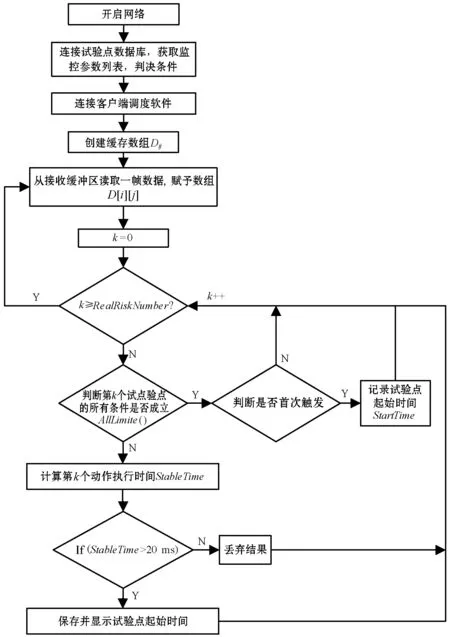
圖7 試驗(yàn)點(diǎn)自動(dòng)識別算法
主要步驟如下:
1) 開啟網(wǎng)絡(luò)。
2) 連接知識數(shù)據(jù)庫,獲取監(jiān)控參數(shù)列表,知識規(guī)則。
3) 鏈接客戶端調(diào)度軟件(該軟件用于將監(jiān)控參數(shù)列表中的參數(shù)以一定次序發(fā)送至監(jiān)控軟件)。
4) 創(chuàng)建數(shù)據(jù)D[i][j],i為監(jiān)控參數(shù)個(gè)數(shù),j為緩存數(shù)據(jù)長度大小(以接收數(shù)據(jù)頻率為8 p/s為例,10分鐘內(nèi)最多可緩存4 800點(diǎn),即j的最大值為4 800)。
5) 接收實(shí)時(shí)數(shù)據(jù),并保存至D[i][j]。
6)k為需要識別的試驗(yàn)點(diǎn)序號,RealRiskNumber為需要識別的試驗(yàn)點(diǎn)個(gè)數(shù),k=0。
7) 判斷是否k≥RealRiskNumber。如果成立,則轉(zhuǎn)到步驟5;如果不成立,則轉(zhuǎn)到步驟8。
8) 判斷第k個(gè)試驗(yàn)點(diǎn)的所有識別規(guī)則是否成立。如果成立,則轉(zhuǎn)到步驟9;如果不成立,則轉(zhuǎn)到步驟10。
9) 判斷是否首次觸發(fā),如果成立,則記錄試驗(yàn)點(diǎn)起始時(shí)間StartTime。k++,并跳轉(zhuǎn)到步驟7。
10) 計(jì)算第k個(gè)動(dòng)作執(zhí)行持續(xù)時(shí)間StableTime,判斷StableTime是否大于MinStableTime(MinStableTime為動(dòng)作執(zhí)行最小時(shí)間)。如果成立,則記錄動(dòng)作起始與結(jié)束時(shí)間,并保存數(shù)據(jù)至本地;如果不成立,則丟棄結(jié)果。
11)k++,并跳轉(zhuǎn)到步驟7。
4 試驗(yàn)點(diǎn)智能評估
試驗(yàn)點(diǎn)評估是通過對試驗(yàn)點(diǎn)執(zhí)行過程中的數(shù)據(jù)進(jìn)行分析,依照試驗(yàn)點(diǎn)執(zhí)行標(biāo)準(zhǔn),評價(jià)試驗(yàn)點(diǎn)執(zhí)行情況。實(shí)時(shí)階段的試驗(yàn)點(diǎn)評估是快速了解試飛效果的重要手段,對提高試驗(yàn)機(jī)試飛效率有著重要的作用。
試驗(yàn)點(diǎn)的評估主要依靠二次計(jì)算和評價(jià)模型,傳統(tǒng)評估方式將二次計(jì)算和效果評價(jià)單獨(dú)進(jìn)行,并且效果評估模式相對固定,如計(jì)算參數(shù)在均值附近的比例、參數(shù)狀態(tài)變化等。如果課題提出特殊評估方法,需要重新修改軟件,給系統(tǒng)維護(hù)和使用帶來了巨大的麻煩。因此,本系統(tǒng)采用開放式結(jié)構(gòu),以動(dòng)態(tài)庫的形式實(shí)現(xiàn)試驗(yàn)點(diǎn)二次計(jì)算和試驗(yàn)點(diǎn)評估功能。試驗(yàn)點(diǎn)評估流程如圖8所示。
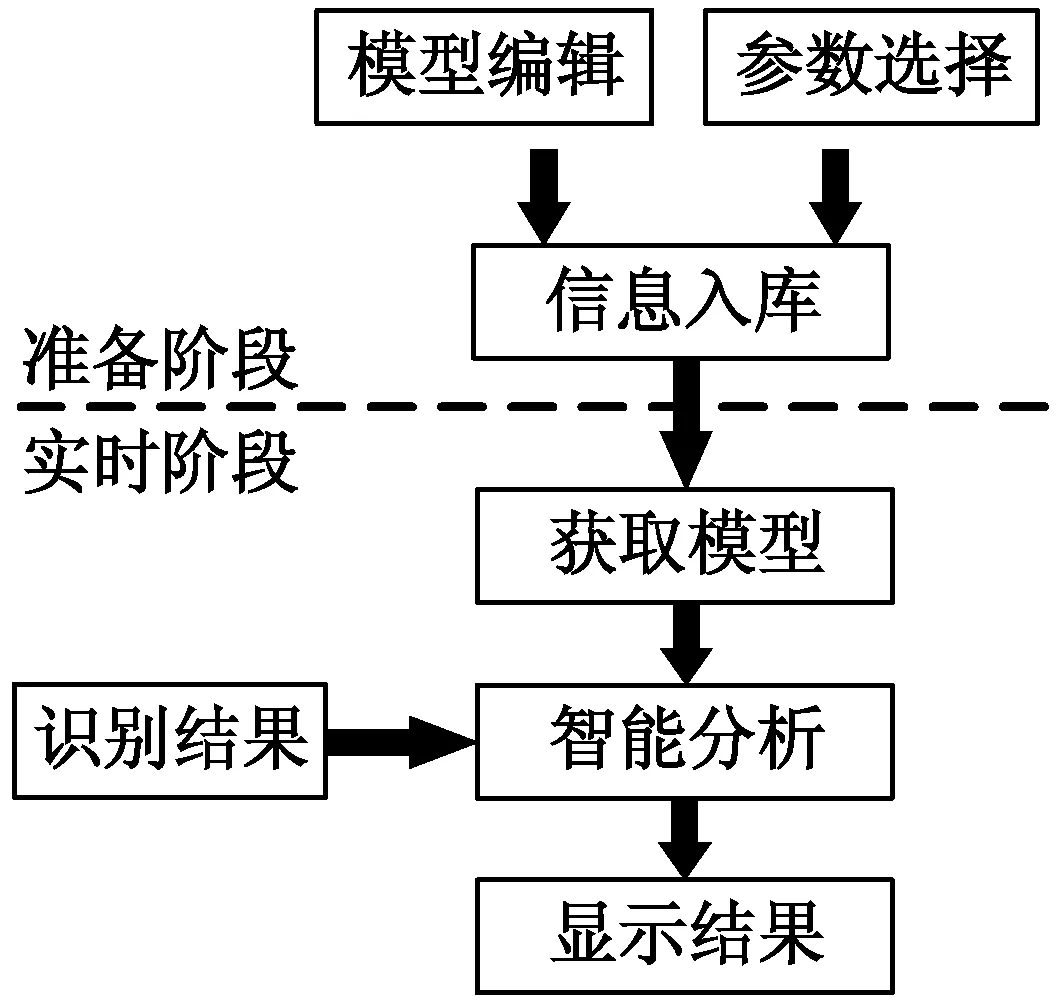
圖8 試驗(yàn)點(diǎn)評估流程
首先需要在任務(wù)準(zhǔn)備階段編輯試驗(yàn)點(diǎn)評估模型,該模型采用固定格式,包含各種試驗(yàn)點(diǎn)評估的常規(guī)函數(shù),用戶只需要根據(jù)具體情況稍作更改即可完成一個(gè)試驗(yàn)點(diǎn)的評估。通常該模板主要包含以下幾個(gè)部分:
1) 輸入函數(shù),用于指定該試驗(yàn)點(diǎn)評估所需參數(shù)、數(shù)據(jù)源等。
2) 計(jì)算函數(shù),用于計(jì)算評估試驗(yàn)點(diǎn)所需要的計(jì)算公式。
3) 評估函數(shù),用于實(shí)際計(jì)算結(jié)果與預(yù)期結(jié)果的比較及可能的比較結(jié)果信息;并根據(jù)實(shí)際需求,設(shè)置多級評價(jià)標(biāo)準(zhǔn),評價(jià)試驗(yàn)點(diǎn)執(zhí)行結(jié)果。
4) 輸出函數(shù),用于將關(guān)鍵的評估信息輸出至軟件界面及將詳細(xì)的評估結(jié)果保存在指定位置。
圖9展示了某型直升機(jī)懸停科目的對比評價(jià)過程,圖10展示了相關(guān)的詳細(xì)評價(jià)結(jié)果,該結(jié)果文件是根據(jù)評估模型生成的,詳細(xì)程度取決于評估模型。
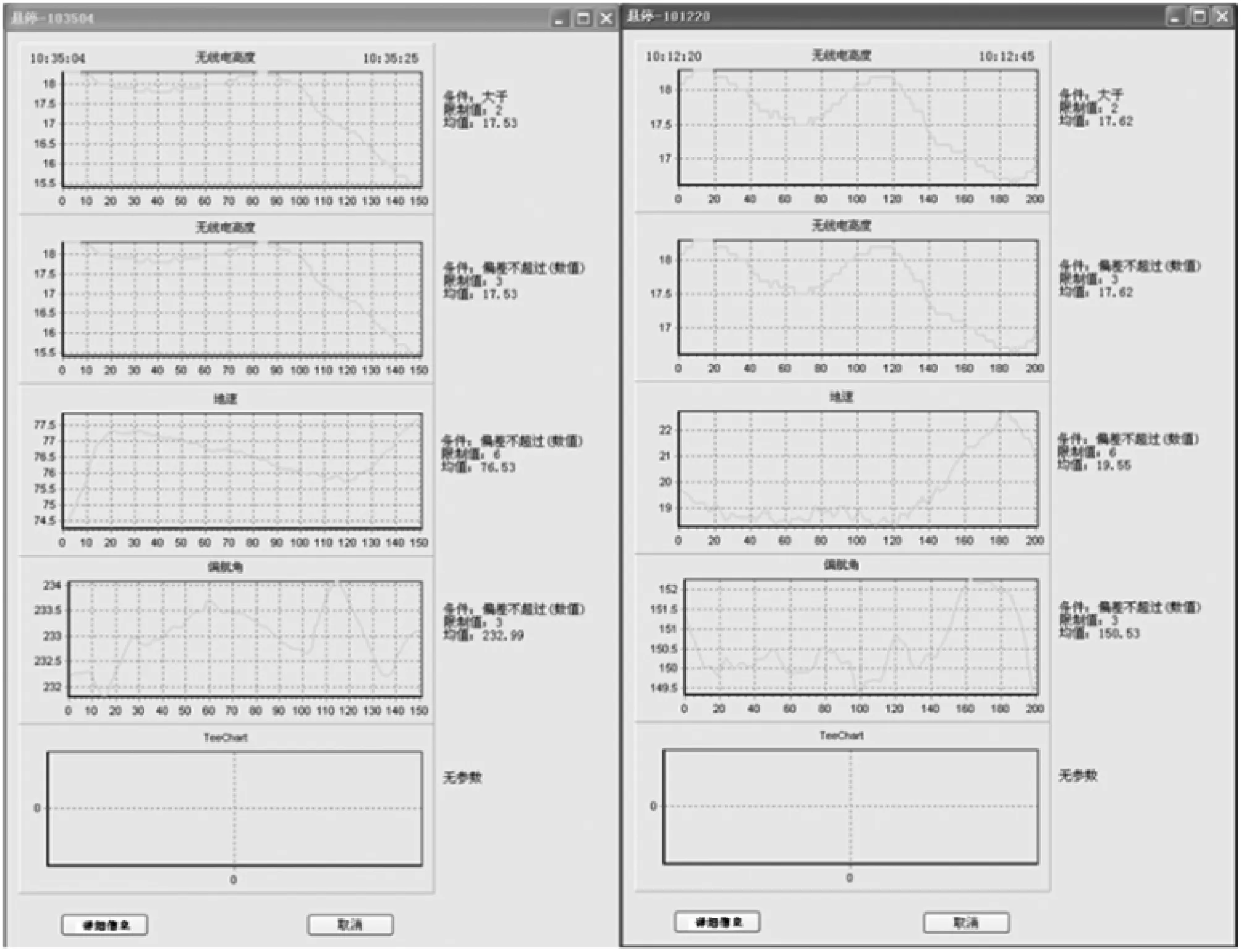
圖9 試驗(yàn)點(diǎn)評估結(jié)果

圖10 詳細(xì)評價(jià)信息
5 結(jié)果分析
經(jīng)實(shí)際測試,該系統(tǒng)除了在各項(xiàng)功能上滿足要求外,性能也達(dá)到了實(shí)時(shí)監(jiān)控的要求。表3展示了該系統(tǒng)在某型直升機(jī)試飛過程中的部分動(dòng)作識別效果。為保證測試結(jié)果的準(zhǔn)確性,剔除了部分由于飛行員個(gè)人原因?qū)е嘛w行動(dòng)作嚴(yán)重變形,經(jīng)試飛工程師確認(rèn)沒有實(shí)用價(jià)值的動(dòng)作,以及由于遙測信號問題而無法正常識別的動(dòng)作。
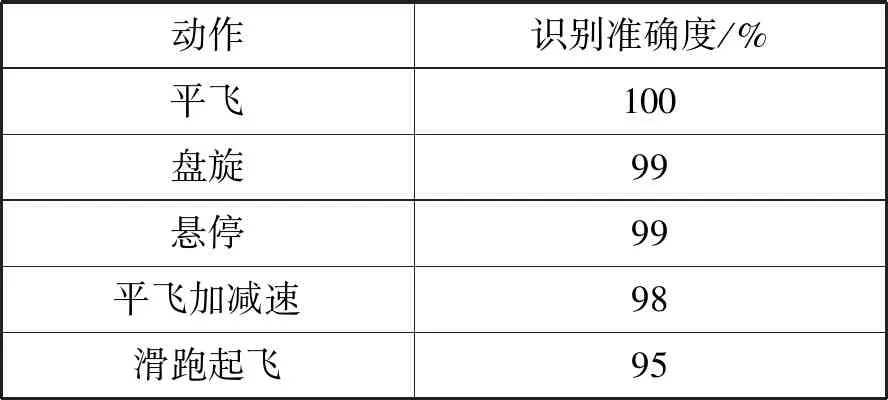
表3 測試結(jié)果
從測試結(jié)果可以看出,該系統(tǒng)對于基礎(chǔ)動(dòng)作的識別在99%以上,對組合動(dòng)作的識別在95%以上。這主要是因?yàn)闃?biāo)準(zhǔn)試驗(yàn)點(diǎn)的參數(shù)門限相對放得比較寬,對于要求較為嚴(yán)格的試驗(yàn)科目,可在評價(jià)函數(shù)中設(shè)置相應(yīng)的更為嚴(yán)格的評價(jià)標(biāo)準(zhǔn),即評價(jià)函數(shù)根據(jù)實(shí)際需求,可設(shè)置多級評價(jià)標(biāo)準(zhǔn),以實(shí)現(xiàn)對試驗(yàn)點(diǎn)執(zhí)行優(yōu)劣的評價(jià)。
6 結(jié) 語
本文通過研究試驗(yàn)機(jī)試驗(yàn)點(diǎn)的特征,總結(jié)了試驗(yàn)機(jī)試驗(yàn)點(diǎn)識別及評價(jià)方法,設(shè)計(jì)了試驗(yàn)點(diǎn)知識數(shù)據(jù)管理軟件和試驗(yàn)點(diǎn)自動(dòng)識別與評價(jià)軟件,實(shí)現(xiàn)了基于試驗(yàn)點(diǎn)自動(dòng)識別的飛行試驗(yàn)實(shí)時(shí)監(jiān)控技術(shù),顯著提高了型號試飛效率,為后續(xù)智能化專家監(jiān)控系統(tǒng)的實(shí)現(xiàn)奠定了堅(jiān)實(shí)的基礎(chǔ)。
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
小學(xué)生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學(xué)低年級(2017年4期)2017-06-09 16:22:28
中華手工(2017年2期)2017-06-06 23:00:31
作文評點(diǎn)報(bào)·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學(xué)周刊·少年版(2015年4期)2015-07-07 20:56:37
中國教育技術(shù)裝備(2015年19期)2015-03-01 02:43:07
中外會(huì)展(2014年4期)2014-11-27 07:46:46
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51
體育師友(2012年4期)2012-03-20 15:30:10