一種視覺(jué)傳感器障礙物覆蓋方法研究*
2020-04-18 02:23:32刁望成宋宇博
科技與創(chuàng)新 2020年6期
刁望成,宋宇博
一種視覺(jué)傳感器障礙物覆蓋方法研究*
刁望成,宋宇博
(蘭州交通大學(xué)機(jī)電技術(shù)研究所,甘肅 蘭州 730070)
為從視覺(jué)傳感器覆蓋角度提高自動(dòng)駕駛車輛感知系統(tǒng)的感知效果,以視覺(jué)傳感器探測(cè)區(qū)域內(nèi)障礙物覆蓋面積為量化評(píng)價(jià)指標(biāo),提出一種優(yōu)化視覺(jué)傳感器覆蓋的方法。該方法在建立視覺(jué)傳感器探測(cè)區(qū)域模型的基礎(chǔ)上,引入不規(guī)則三角網(wǎng)描述障礙物表面特征,將視覺(jué)傳感器探測(cè)區(qū)域覆蓋面積計(jì)算問(wèn)題轉(zhuǎn)化為三角網(wǎng)格中三角形覆蓋判定和三角形面積累加問(wèn)題。以視覺(jué)傳感器探測(cè)區(qū)域覆蓋面積最大化為優(yōu)化目標(biāo),構(gòu)建一種面向三維覆蓋的視覺(jué)傳感器覆蓋模型,并設(shè)計(jì)粒子群算法對(duì)模型進(jìn)行求解,最后通過(guò)仿真驗(yàn)證該優(yōu)化方法的有效性。
視覺(jué)傳感器覆蓋優(yōu)化;三角網(wǎng)格;探測(cè)區(qū)域覆蓋面積;粒子群算法
隨著自動(dòng)駕駛技術(shù)的不斷普及,車輛環(huán)境感知功能越來(lái)越受到人們重視。車載攝像頭具有成本低和識(shí)別功能等特點(diǎn),被廣泛應(yīng)用到環(huán)境感知系統(tǒng)中。為保證自動(dòng)駕駛車輛的行駛安全,需要保證車載視覺(jué)傳感器具備較高的探測(cè)性能,高精度攝像頭對(duì)成本和技術(shù)難度提出了一定要求,也不利于自動(dòng)駕駛技術(shù)的推廣。本文通過(guò)調(diào)整視覺(jué)傳感器在車輛中的安裝位置來(lái)增強(qiáng)對(duì)障礙物的探測(cè)效果。文獻(xiàn)[1]提出了無(wú)線多媒體傳感器三維覆蓋模型,通過(guò)調(diào)整傳感器自身位置和角度實(shí)現(xiàn)監(jiān)測(cè)區(qū)域覆蓋增強(qiáng)。文獻(xiàn)[2]提出了限定傳感器具體探測(cè)范圍實(shí)現(xiàn)監(jiān)測(cè)區(qū)域全覆蓋算法。文獻(xiàn)[3]提出了一種視覺(jué)傳感器三維覆蓋模型,通過(guò)覆蓋不同建筑物和道路場(chǎng)景增強(qiáng)覆蓋范圍。
以上研究成果所建立的模型計(jì)算量相對(duì)復(fù)雜,且沒(méi)對(duì)環(huán)境中具體出現(xiàn)的障礙物進(jìn)行研究,不能作為實(shí)際場(chǎng)景下的方法推廣。本文建立一種簡(jiǎn)化視覺(jué)傳感器覆蓋模型,針對(duì)車輛行駛過(guò)程中出現(xiàn)的車輛和行人等障礙物進(jìn)行覆蓋研究,建立視覺(jué)傳感器和障礙物之間的關(guān)聯(lián)關(guān)系,能夠有效提高視覺(jué)傳感器對(duì)障礙物的覆蓋效果。
1 視覺(jué)傳感器探測(cè)理論研究
本文研究的視覺(jué)傳感器針對(duì)障礙物的覆蓋增強(qiáng),首先建立傳感器的有向探測(cè)模型,使用探測(cè)距離和探測(cè)角度兩個(gè)參數(shù)來(lái)建立模型,如圖1所示。在相關(guān)文獻(xiàn)基礎(chǔ)上,該模型可用三元組(s,,)表示,其中s=(s,s,s)為視覺(jué)傳感器在空間中的三維坐標(biāo),=(,)表示視覺(jué)傳感器在水平方向上的偏移角度和垂直方向上的偏移角度,=(,)為視覺(jué)傳感器主感知方向,為視覺(jué)傳感器在水平和垂直方向上的探測(cè)角度,為視覺(jué)傳感器的探測(cè)距離。

圖1 視覺(jué)傳感器探測(cè)模型
2 探測(cè)對(duì)象模型研究
2.1 點(diǎn)云網(wǎng)格化處理
本文采用點(diǎn)云數(shù)據(jù)表示障礙物,通過(guò)點(diǎn)云數(shù)據(jù)生成的障礙物表面三角網(wǎng)格模擬障礙物表面。計(jì)算視覺(jué)傳感器不同的三維坐標(biāo)和偏移角度下視覺(jué)傳感器自身位置參數(shù)。行人和車輛是最為常見(jiàn)的障礙物,采用三角網(wǎng)生長(zhǎng)法將點(diǎn)云數(shù)據(jù)生成表面三角形網(wǎng)格,以三角形網(wǎng)格每個(gè)三角形為基本單元,對(duì)障礙物進(jìn)行模型建立[4],相關(guān)內(nèi)容如下所示。
最接近:以最近的三點(diǎn)形成三角形,且各線段(三角形的邊)皆不相交。
唯一性:不論從區(qū)域何處開(kāi)始構(gòu)建,最終都將得到一致的結(jié)果。
2.2 探測(cè)對(duì)象模型分析
通過(guò)運(yùn)用三角網(wǎng)生長(zhǎng)法對(duì)障礙物點(diǎn)云數(shù)據(jù)進(jìn)行計(jì)算,獲得探測(cè)對(duì)象三角網(wǎng)格模型。該探測(cè)對(duì)象模型在一般情況下,表面網(wǎng)格中的每個(gè)三角形周圍有3個(gè)三角形相連,三角形的每個(gè)頂點(diǎn)與其余三角形的6個(gè)頂點(diǎn)相連,在表面凹凸不平的情況下會(huì)有不同特征。本文選用汽車障礙物作為探測(cè)對(duì)象進(jìn)行研究,其離散化模型如圖2所示。

圖2 探測(cè)對(duì)象模型
為了更方便計(jì)算探測(cè)對(duì)象表面被視覺(jué)傳感器覆蓋的面積,以每個(gè)三角形中心點(diǎn)k表示探測(cè)對(duì)象表面中每個(gè)對(duì)應(yīng)三角形,通過(guò)判斷k是否被視覺(jué)傳感器覆蓋來(lái)確定相應(yīng)的三角形是否被覆蓋,將探測(cè)對(duì)象模型表面覆蓋面積的計(jì)算問(wèn)題轉(zhuǎn)化為三角形中心點(diǎn)的覆蓋判定和三角形面積累加計(jì)算的問(wèn)題。中心點(diǎn)k由空間中的三維坐標(biāo)和三角網(wǎng)格面的法向量表示。k=(k,k,k,,),其中(k,k,k)為三角網(wǎng)格中心點(diǎn)三維坐標(biāo),(,)為三角形網(wǎng)格面法向量。
2.3 覆蓋方法
視覺(jué)傳感器三維坐標(biāo)與探測(cè)對(duì)象三角網(wǎng)格中心點(diǎn)在一個(gè)坐標(biāo)系下進(jìn)行研究。中心點(diǎn)如果被視覺(jué)傳感器覆蓋,需要滿足如下兩個(gè)條件:①中心點(diǎn)需要出現(xiàn)在視覺(jué)傳感器的探測(cè)距離內(nèi),還需要出現(xiàn)在視覺(jué)傳感器探測(cè)角度內(nèi),具體判斷方法為,計(jì)算目標(biāo)點(diǎn)法向量與視覺(jué)傳感器主感知方向法向量之間夾角,所得夾角應(yīng)小于視覺(jué)傳感器探測(cè)角度;②計(jì)算中心點(diǎn)與視覺(jué)傳感器三維坐標(biāo)距離和視覺(jué)傳感器探測(cè)距離大小,所得距離應(yīng)小于視覺(jué)傳感器探測(cè)距離。
3 視覺(jué)傳感器覆蓋優(yōu)化
3.1 視覺(jué)傳感器覆蓋優(yōu)化模型
在障礙物離散化模型和視覺(jué)傳感器探測(cè)模型的基礎(chǔ)上,以視覺(jué)傳感器的探測(cè)區(qū)域內(nèi)所覆蓋的三角形總面積之和作為量化評(píng)價(jià)的指標(biāo)。視覺(jué)傳感器的三維坐標(biāo)和偏移角度為優(yōu)化變量,建立的視覺(jué)傳感器覆蓋優(yōu)化模型為:

式(1)中:為三角形總數(shù);k為符合覆蓋條件的三角形二進(jìn)制變量,被覆蓋為1,否則為0。目標(biāo)函數(shù)值越大,表示視覺(jué)傳感器覆蓋效果越好。
3.2 采用粒子群算法構(gòu)建搜索領(lǐng)域
視覺(jué)傳感器覆蓋優(yōu)化模型的求解需要確定每個(gè)視覺(jué)傳感器的三維坐標(biāo)和偏移角度,其中三維坐標(biāo)包括3個(gè)優(yōu)化變量,偏移角度包括2個(gè)優(yōu)化變量。
本文采用粒子群算法,針對(duì)覆蓋模型中三維坐標(biāo)和偏移角度的約束條件構(gòu)建搜索領(lǐng)域,具體算法設(shè)計(jì)如下:①設(shè)置粒子數(shù)量為,在視覺(jué)傳感器可以安裝的范圍內(nèi)初始化粒子的位置和速度;②比較每個(gè)粒子的覆蓋面積,選擇適應(yīng)度最大的粒子位置作為當(dāng)前最優(yōu)解;③循環(huán)第代,由粒子群算法迭代更新粒子速度和位置,迭代產(chǎn)生每個(gè)粒子新的位置,計(jì)算其對(duì)應(yīng)的覆蓋面積,分別與當(dāng)前粒子最大覆蓋面積進(jìn)行比較,更新粒子最好位置;④比較每個(gè)粒子的覆蓋面積和種群所經(jīng)歷的最好位置覆蓋面積,選擇當(dāng)前全局最大覆蓋面積粒子位置作為+1代全局最佳位置;⑤判斷是否等于最大代數(shù),沒(méi)有則執(zhí)行步驟③,若滿足則輸出粒子最大覆蓋面積和粒子最好位置。
3.3 仿真計(jì)算分析
為驗(yàn)證視覺(jué)傳感器覆蓋效果增強(qiáng),仿真實(shí)驗(yàn)設(shè)置在長(zhǎng)度50 m,寬度10 m的場(chǎng)景中,障礙物位于智能車中心點(diǎn)的正前方35 m,障礙物設(shè)置為2輛小汽車,位于智能車正前方。視覺(jué)傳感器數(shù)量為2,探測(cè)距離為60 m,探測(cè)角度為20°。根據(jù)智能車實(shí)際能放置視覺(jué)傳感器的位置設(shè)置約束條件,如表1所示。
表1 視覺(jué)傳感器參數(shù)設(shè)置
傳感器x坐標(biāo)/cmz坐標(biāo)/cm水平偏移角/rad垂直偏移角/rad 視覺(jué)傳感器1[-75,0][70,120][1.05,2.09][1.05,2.09] 視覺(jué)傳感器2[-75,0][70,120][1.05,2.09][1.05,2.09]
仿真實(shí)驗(yàn)結(jié)果,2臺(tái)視覺(jué)傳感器總覆蓋面積之和如圖3所示,視覺(jué)傳感器自身位置不同,參數(shù)在粒子群算法優(yōu)化前后所對(duì)應(yīng)的總覆蓋面積如表2所示。
4 結(jié)論
由圖3可知,視覺(jué)傳感器感知區(qū)域的覆蓋面積之和隨著迭代代數(shù)的增加不斷增加,最后粒子群算法達(dá)到收斂,得到總覆蓋面積的最大值。由表格數(shù)據(jù)可知,每個(gè)視覺(jué)傳感器覆蓋面積均有所增加,其覆蓋效果有所增強(qiáng),同時(shí)得到每個(gè)傳感器的三維坐標(biāo)和偏移角度。該方法會(huì)因障礙物形狀不同差生不同結(jié)果,但是對(duì)實(shí)際自動(dòng)駕駛車輛如何安裝視覺(jué)傳感器也有一定理論價(jià)值,對(duì)實(shí)際工程問(wèn)題具有一定指導(dǎo)作用。
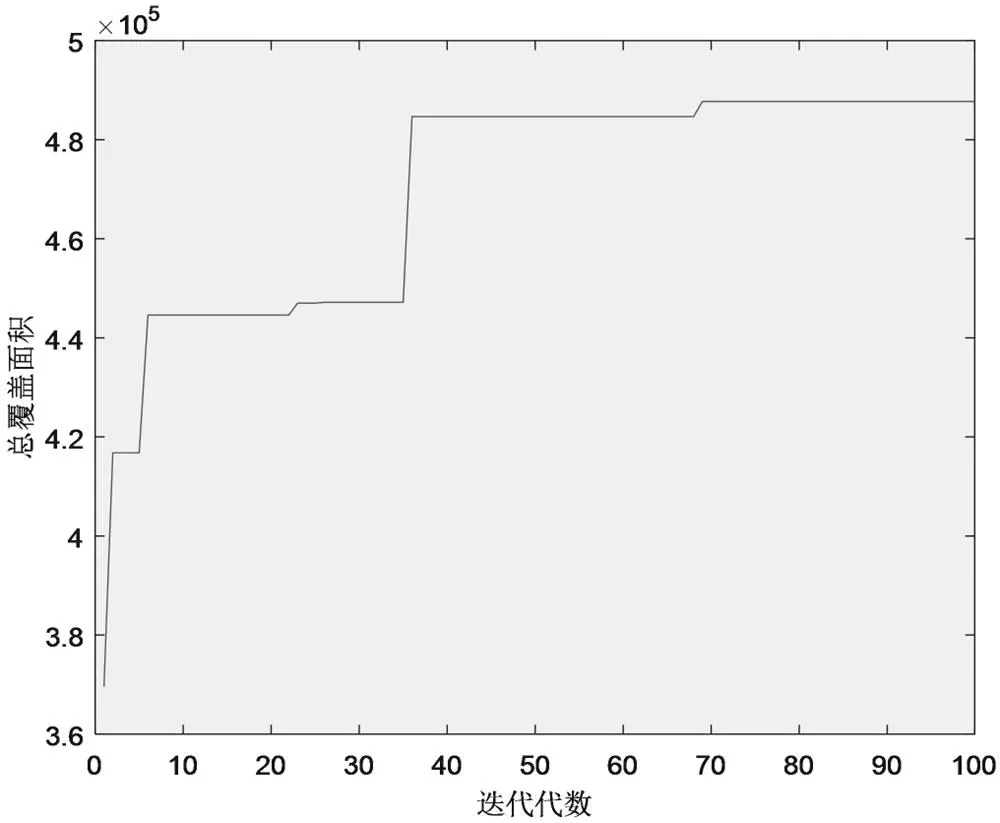
圖3 總覆蓋面積迭代圖
表2 視覺(jué)傳感器覆蓋面積
優(yōu)化前x坐標(biāo)/cmz坐標(biāo)/cm水平偏移角/rad垂直偏移角/rad覆蓋面積/cm2 視覺(jué)傳感器1-161131.711.58122 283.53 視覺(jué)傳感器2261121.621.66212 822.07 優(yōu)化后x坐標(biāo)/cmz坐標(biāo)/cm水平偏移角/rad垂直偏移角/rad覆蓋面積/cm2 視覺(jué)傳感器1-56.87106.741.481.54244 078.61 視覺(jué)傳感器231.0891.071.511.55243 635.96
[1]肖甫,王汝傳,孫力娟,等.一種面向三維感知的無(wú)線多媒體傳感器網(wǎng)絡(luò)覆蓋增強(qiáng)算法[J].電子學(xué)報(bào),2012,40(1):167-172.
[2]王艷嬌,畢曉君,滕志軍,等.三維無(wú)線多媒體傳感器網(wǎng)絡(luò)全目標(biāo)覆蓋算法[J].吉林大學(xué)學(xué)報(bào)(工學(xué)版),2015,45(5):1671-1679.
[3]高飛.視頻傳感器網(wǎng)絡(luò)多目標(biāo)多要素三維覆蓋優(yōu)化調(diào)度方法[D].南京:南京師范大學(xué),2018.
[4]黃浩洋,鄧飛,隆振海,等.二維離散點(diǎn)集Delaunay三角網(wǎng)生長(zhǎng)算法的改進(jìn)[J].電腦知識(shí)與技術(shù),2016,12(23):188-191.
2095-6835(2020)06-0083-02
U495
A
10.15913/j.cnki.kjycx.2020.06.030
刁望成(1993—),男,山東菏澤人,在讀碩士研究生,研究方向?yàn)樽詣?dòng)駕駛環(huán)境感知傳感器布局優(yōu)化。
宋宇博。
甘肅省高等學(xué)校科學(xué)研究項(xiàng)目(編號(hào):2018C-10)
〔編輯:嚴(yán)麗琴〕
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03