AUV 水下通信技術研究現狀及發展趨勢探討
2020-04-17 18:58:36張彥敏
艦船科學技術 2020年2期
竇 智,張彥敏,劉 暢,孔 斌
(武漢第二船舶設計研究所,湖北 武漢 430064)
0 引 言
隨著海洋開發的不斷深入,各型AUV 在水下作業、水下勘察、海洋監測等領域逐漸得到應用和推廣,產生了實質性的經濟效益。軍事方面,隨著新軍事革命的變革和發展,水下航行器作為新型水下作戰體系的重要組成部分得到各國的高度重視和大力發展。AUV 的性能逐步提升,作戰應用范圍和深度不斷得到拓展,無人航行器與有人航行器甚至水面艦艇、水面航行器集群式研究、應用逐漸提上日程。未來必將極大改變傳統水下作戰模式,對未來戰爭模式產生深遠影響。
水下控制、數據通信、圖像傳輸以及協同作戰的配
合都離不開水下通信的保障。水下通信傳輸速率、傳輸帶寬、傳輸距離等因素限制了當前水下通信技術的應用,同時,限制了AUV 的軍用、民用發展。一旦水下通信技術問題得到解決,必然會引起AUV 智能化、集群化、協同化作戰模式的跨越式發展,必然會大大提高在民用領域應用的廣度、深度、可靠性與經濟性。因此,熟練運用成熟的水下通信技術,探索發展新的水下通信技術,對AUV 快速發展將起到至關重要的作用。
1 AUV 通信技術及其應用場景
1.1 主要應用場景
AUV 水下通信主要參與者包括AUV、水面母船、水下網絡節點、浮潛標、水面艦艇等設備,其通信內容包含控制指令、位置信息、水下環境參數、海洋數據信息等。AUV 通信技術主要有以下3 種應用場景:AUV 與AUV 之間通信、AUV 與母船(母潛艇、網絡中心平臺)間通信、AUV 與水下通信網絡節點間通信或其他水面艦艇(或水面無人艇)或裝備之間通信。對于不同的傳輸內容及通信參與者或不同的傳輸距離,需要選擇不同的傳輸速率進行通信。
目前,受制于傳輸距離、傳輸速率和具體傳輸技術的影響,上述水下通信主要傳輸內容包括以下方面:AUV 與AUV 之間的通信主要是明確相互之間的距離位置,以便協同,需要用高數據率傳輸實時方位信息;AUV 與母船之間的遠程通信主要是母船通過低數據率將控制指令傳輸給AUV,AUV 與母船之間的近程通信主要是AUV 使用高數據率將水下獲得的圖像、數據等信息進行交互式傳輸;AUV 還可通過水下通信網絡節點建立與水面船只甚至陸上信息中心之間的信息交互,在此主要應用高數據率將數據信息進行中繼傳遞。未來,在水下通信技術跨越式發展的基礎上,在水下通信網絡節點支撐的基礎上,可以實現AUV 與有人航行器甚至水面艦艇、水面航行器之間遠程高速率的指令、信息甚至圖像、視頻的實時傳輸。
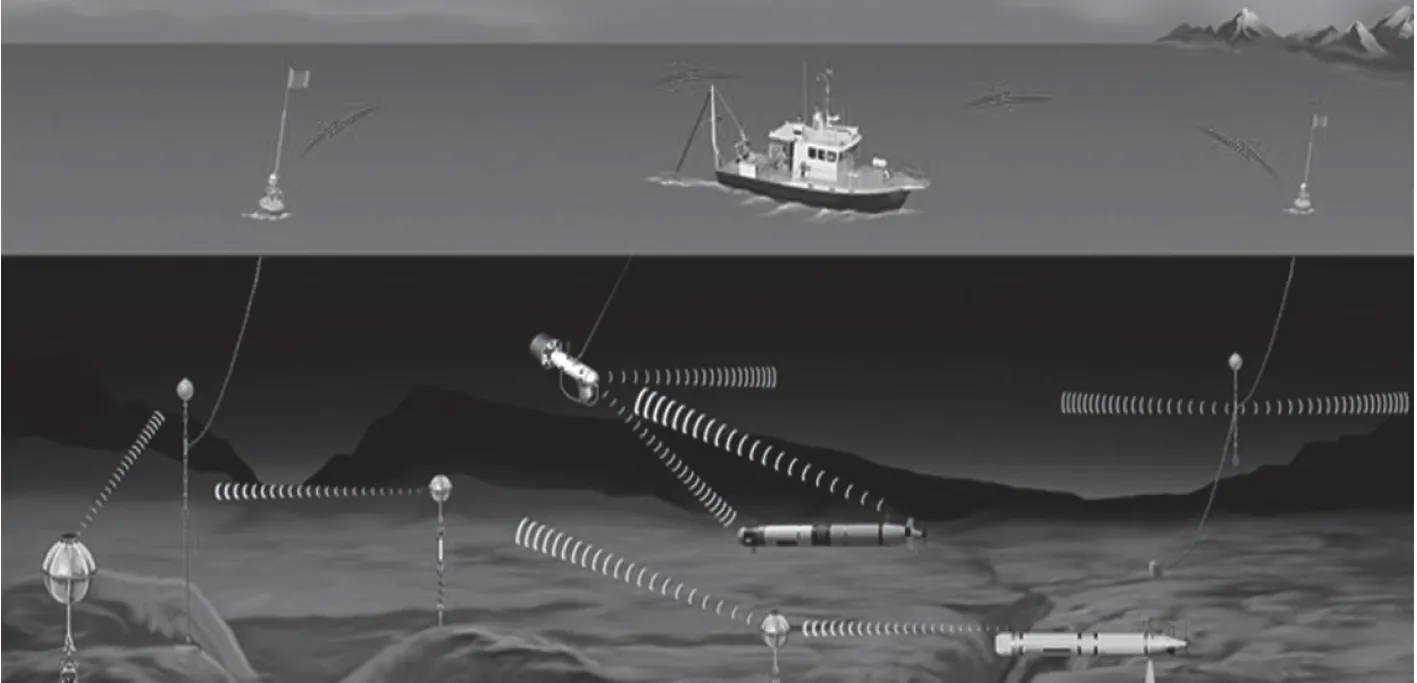
圖 1 AUV 水下通信場景Fig. 1 AUV underwater communication scene
1.2 水下通信主要形式
在應用場景多樣化的情況下,需要多種通信方式相結合的方式進行通信。下面針對目前主要使用的水下通信方式以及未來具有良好發展前景的通信方式進行分析、總結。
1.2.1 有纜通信
水下有纜通信是目前進行水下通信最成熟的技術,主要應用在ROV 及有纜(或微細光纖纜)潛器的正常水下通信中。這種方式具有通信容量大、抗電磁干擾、保密性好等優點。實現這些功能需要對電纜、光纜提出較大的抗拉強度、彎曲盤放、抗腐蝕老化等要求。但是由于電纜/光纜長度的限制,無法進行更長距離的水下通信,潛器水下行動嚴重受限,所有行動都需要母船進行配合。
1.2.2 電磁波通信
水下環境具有許多獨特的特征,使得它與地面傳統通信系統的無線電傳播相比具有獨特性、局限性。如鹽濃度、壓力、溫度、光量、風以及波浪等因素可能會導致無線電波在海水中衰減嚴重,且頻率越高衰減越大,或者遠距離通信的數據傳輸速率極低。
目前,各國海軍主要是使用甚低頻(VLF)和超低頻(SLF)進行水面與水下遠程通信。超低頻系統的地基天線長達幾十千米,通信速率低于1bps,僅能傳輸簡單指令,無法滿足水下高速傳輸信息的需求。
1.2.3 水下光(激光)通信
水下可見光通信(Underwater Visible Light Communication,UVLC),一般是由波長在450~530 nm 的藍綠激光作為傳輸信息的載體,一直受到多方青睞。美軍于20 世紀90 年代初期最先完成初級階段的藍綠激光通信的實驗,實際實裝裝備未見報道。但水下光通信必須面對的是,在淺海近距離通信中,水中懸浮顆粒及浮游生物會對光產生明顯的散射作用,還包括水媒質、溶解物及懸浮物等對光信號的吸收以及來自水面外的強烈自然光以及水下生物的輻射光都對信號的發射接收形成干擾,對遠距離的水下通信形成了天然的屏障。
近年,Chao Wang 等利用MCNS(Monte Carlo numerical Simulation)建立了具有SPAD(Single Photon Avalanche Diode)接收機的長距離UVLC 系統信道模型。仿真結果表明,在較純凈海水中,通信距離可以擴大到500 m[1]。
1.2.4 量子通信
量子通信是近幾年通信技術研究發展熱點,利用光在微觀世界的粒子特性,讓一個個光子傳輸“0”和“1”任意方式疊加的信息。量子通信在地空無線電中已經進行了實際應用,可極大程度上加密傳輸信息,在信息安全方面有了很大提高。水下量子通信的研究還停留在理論模型階段,該項技術正式應用于實際工程中還需很長一段時間。但是,通過現階段的研究成果可以發現,水下量子通信是可行的,一旦應用到實際中,不僅可以提高通信保密性,而且相對于甚低頻通信可以加強通信帶寬,這些都可以很大程度上提高通信質量。
F Bouchard 等通過對水下量子信道的可行性研究,為水下潛器與母船之間提供安全通信鏈接提供了理論基礎。通過將水下量子信道中的主要湍流特征看作像散,闡述了真空空間與水下鏈路之間的顯著差異。通過試驗,實現了二維和三維BB84 協議密鑰在3 m 距離上的正確編解碼[2]。
1.2.5 水聲通信
如前所述,電磁波通信、光通信以及量子通信都具有有限的水下通信范圍。前者受到強衰減的嚴重影響,這導致較小的傳播距離,而后者則取決于水混濁度。聲(水聲)通信由于可以實現更遠的通信距離,目前已成為水下通信的主導技術。
聲波在水下的信號衰減較小,傳輸距離遠,可以從幾百米延伸至幾十千米。水聲通信相比前面介紹的3 種通信在傳播距離上有著明顯的優勢。水聲通信系統面臨的最大挑戰就是對抗由于水聲信道引起的頻率選擇性衰落以及多徑傳播引起的碼間干擾。為了解決這2 種關鍵問題,主要是通過選擇合適的調制技術和信道糾錯編碼技術來實現數據的高速準確傳輸。
在信號調制技術方面,王明華[3]設計了OFDM 的高速水聲通信系統,并進行了湖上和海上試驗。湖試中,在6 km 距離下,傳輸速率達到7.6 kbps,誤碼率低于10–4;海試中,在12 km 距離下,傳輸速率達到8.3 kbps,誤碼率低于10–3。在信道編碼方式選擇方向上,徐小卡[4]在松花湖試驗中,采用LDPC、OFDM、信道估計技術,在5 km 的通信距離下,鏈路數據率達到9.71 kbps。
隨著技術的不斷進步,水聲通信技術是未來水下通信的重要發展方向之一,當水聲通信技術能夠在一定程度上克服上述由于水聲信道帶來的頻率選擇性衰落以及多徑傳播引起的碼間干擾,水聲通信將極大地提高現有水下通信水平,為AUV 發展打下良好技術基礎。
2 國外水下通信技術發展現狀
AUV 通信技術與水下通信技術在本質上具有相同性。國外AUV 通信技術發展,主要以美國、英國、法國、德國等國家技術較為先進,具有代表性。
2.1 美國水下通信技術發展現狀
2.1.1 現狀
隨著水聲通信技術的發展,用水聲無線連接代替光纜、線纜連接成為海洋監測網的趨勢。美國最典型的水下通信應用是Seaweb,在此基礎上,2005 年美國海軍研究室和國防部先進研究計劃局(DARPA)聯合提出 PLUSNet(Persistent littoral Undersea Surveillance Network)計劃[5]。該計劃打算利用10 年的時間,建設一個覆蓋美國近海水下無線持續監測網絡。以水下浮潛標為固定節點、水下無人平臺為活動節點構建網絡,在實現監測的同時為巡航導彈、潛艇提供導航,并通過水面無線電網絡與指揮系統連接。
2.1.2 新的進展
美海軍于2016 年12 月至2017 年3 月,連續啟動水下通信技術研發項目,推動水下無線電通信、水下光通信、水下網絡通信技術發展。
1)微型輕質無線電發射機項目助力AUV 等小型平臺通信
DARPA 微系統辦公室發布AMEBA 項目廣泛機構征詢書,與傳統產生電磁波方式不同,該項目中利用有強電場或強磁場的特殊材料的機械振動產生電磁波,不僅可以極大程度減小無線發射機體積,實現設備小型化,而且可以充分利用超低頻/甚低頻(ULF/VLF)穿透性,提高水下超視距通信能力。
2)“水下多聲傳感器可靠配置異構集成網絡”促進水下網絡通信技術發展
水下網絡通信是未來發展的必然趨勢。該項目將先進物理層算法引入水下通信調制解調器,使用多種網絡協議將傳感器信息及時傳送到信息中心,并利用先進水下通信模擬器分析改進模型性能,在仿真結果達到性能指標要求后,再開展硬件設計,并進行現場測繪。
3)美國海軍發展“模塊化光學通信”技術以實現高速跨域通信
2017 年3 月,美國海軍空間與海戰系統司令部發布“模塊化光學通信”載荷項目公告,目的是設計有人潛艇/UUV 與飛機間的全雙工通信系統。該系統無需水面通信轉換節點,可實現潛艇與飛機的直接通信,目標通信速率不低于1 kbps,未來有望在通信距離15 nmile,深度超過100 t 的位置實現更高速率,并且利用該系統具有低截獲概率和低探測概率(LPI/LPD)的特點,使空潛通信擺脫對水面平臺、浮標的依賴,并無需潛艇浮出水面,為跨域協同作戰開辟新的通信保障途徑。
4)美國伯克利實驗室研發軌道角動量復用技術,實現深海水聲通信速率8 倍提升
2017 年6 月,美國勞倫斯·伯克利國家實驗室完成了螺旋聲波多路復用技術陸上試驗,驗證了聲波信號高效并行傳輸技術可行性,實現通信速率8 倍提升。在此技術中,創造性地采用了廣泛應用于電信和計算機網絡中的多路復用技術,實現在單個頻率上包裝更多的信道,顯著提高了信息傳輸速率。
2.2 歐洲水下通信技術發展現狀
2.2.1 現狀
歐洲等海軍強國的水聲通信技術研究起步較早;2008 年開始針對水下聲通信多個技術方向進行研究;2010 年開始研究水下聲通信網絡;2013 年9 月啟動SUNRISE 項目,在不同水域分別建立5 個聯合的水下聲通信試驗平臺;2017 年確立了首個歐洲通信標準。
2.2.2 新的進展
1)近海觀測網
CMRE(Centre For Maritime Research & Experimentat i o n)開發了一個物理測試平臺近海觀測網絡(LOON),包括海床上一系列小的平臺,每一個小平臺均配備了各種通信設備,彼此連接,并通過光纜與岸基設備連接。觀測網可以直接與互聯網連接,可以獲取真實的試驗數據來測試新的通信技術,降低了試驗成本。
2)機器人物理邏輯連接節點項目(MORPH)
2012 年,歐盟“第七框架計劃”內項目MORPH啟動,該項目開發了一個由很多空間上分開的移動模塊組成的機器人系統,這些模塊攜帶不同且互補的資源,這些模塊依靠信息流的虛擬鏈路連接,通過重新配置,以適應不同的復雜地形。信息流主要依靠水下通信來實現,其中水下網絡中網絡通信和節點定位功能有基于商業的調制解調器完成。
3)SUNRISE 項目
2013 年,歐洲啟動了SUNRISE 項目,該項目在一定程度上受到LOON 的影響,主要針對水下傳感器、水下監控、水聲通信網等水下通信技術進行研究。通過在美國與歐洲建立5 個試驗平臺,針對不同海洋環境條件下的水下通信技術進行試驗。
2.3 其他國家水下通信技術發展現狀
1)日本在AUV 通信技術方面主要偏向高數據率水聲通信技術,加強AUV 與母船之間的交流的時效性,實現大數據量信息的快速傳遞。
2)2017 年7 月,日本國立海洋研究開發機構在水深700~800 m 的海洋環境完成了水下移動物體間藍綠激光通信,通信距離超過100 m,通信速率達到20 MbB/s。
3)韓國在水下聲通信技術在試驗傳輸距離上取得突破,水深100 米時通信距離達到30 千米,比現有技術傳輸距離提高了2 倍以上。
根據上述國外水下通信技術發展現狀的描述可以發現,現在水下通信技術主要發展方向集中在水下網絡通信、水聲通信等方向。水下網絡通信方面主要實現水下組網建設、網絡協議編寫等關鍵技術;水聲通信方面主要是提升系統通信速率。通過國外水下通信技術研究現狀分析,為我國水下通信技術以及AUV 通信技術提供參考。
3 AUV 通信技術未來發展趨勢
3.1 AUV 通信技術組合化
通過對現有技術的總結可以發現,單一通信方式無法滿足對AUV 操作控制的需要,尤其對于水下發射接收單元,利用水下光通信的高傳輸速率和水聲通信的長傳輸距離優勢并將2 種方式有機結合,可以實現系統性能的倍增。
現在,基于水下光學無線鏈路的網絡在中等距離的高數據速率下是可行的。使用光收發器來提供高數據速率傳輸,而當水濁度較高或終端之間的距離較大時,系統使用聲學收發器切換到較低的數據速率,從而提高平均數據速率和可用性。
因此,未來的調制解調器將包含許多信號傳輸手段和處理工具,以便在采用任何可用技術物理環境條件允許時將其組合在一起,在物理層實現高數據速率。
3.2 AUV 通信方式網絡化
AUV 通信方式網絡化主要體現在兩方面,一方面,為應對今后水下無人集群作戰的需求,AUV 的部署數量會有大幅度提升,對水下通信組網的性能提出更高的要求;另一方面,在未來水下AUV 作戰模式的轉變、升級中,網絡化、接力傳輸是最重要研究方向。
水下通信組網在軍民兩用方面都有著巨大的應用潛力,現在各個國家都投入了很大的精力進行研究開發。水下通信組網的關鍵技術是通信網絡協議,目的是為了解決多個節點之間的數據傳輸問題。當AUV 成為水下通信組網的節點后,可以實現水下近程高速通信組網的快速形成,在局部位置可以快速形成通信網絡,提升所在位置觀測信息交互的實時性、有效性和高速率。并且,在實現水下組網通信的基礎上,多個AUV 可以進行協同觀測,增加探測偵察的準確性、時效性,為爭奪戰爭先機與主導權贏得時間。其次,在作戰方面,集群化作戰方式不僅可以提供戰場的全方位態勢評估,還可以實現局部戰場的非對稱性,提高作戰能力及勝算。
3.3 AUV 通信對象多元化
未來水下作戰模式中,將形成海-空-天一體化協同作戰網絡。目前,水上部分使用遠程、高速、寬帶的電磁通信技術,已實現聯合作戰,重點突破對象為水下各平臺、傳感器之間,水面、水下跨域的通信問題,以實現水下潛艇、無人潛航器、傳感器陣列等節點之間順暢的信息傳輸。
通過AUV 與水面無人艇(USV)或無人機之間建立的通信鏈路,實時將AUV 獲取的水下信息傳輸給USV 或無人機,USV 或無人機通過衛星中繼后傳輸給母船或岸基指揮中心,實時獲取水下信息,以加強情報收集的準確性、時效性與有效性。在發生突發情況下,操控員可以通過USV 或無人機將指令傳輸給水下AUV,完成改變航線、探測、攻擊目標等遙控作業或長航時自主作戰。
在水下組網技術尚未成熟之前,可以利用水面USV 或無人機作為中繼節點,對多個水下AUV 進行指揮控制,快速形成作戰能力。在水下遠距離通信成熟后,以核潛艇等作為通信主站,以水下通信網作為節點,可以實現有人艇與無人艇的大規模協同。
3.4 AUV 通信設備小型化
現有水下通信設備為滿足水下特種作戰需要,盡可能增加通信距離,進而選擇了更低的發射頻率。但是,這些都會增加發射機的體積,無法滿足AUV 緊湊性的要求。因此,將現有水下通信設備小型化顯得尤為重要。
4 結 語
為了更好地提高AUV 通信系統性能,需要對現有成熟技術進行充分的挖掘利用,需要針對新技術的重點攻關來推進AUV 通信技術的革新發展。在技術上,需要實現多種通信方式組合化、綜合化、小型化、智能化,在部署方式上,需要實現集群化、網絡化、自動安全接入。
我國水下通信技術的發展和應用,需要在對國內外技術發展趨勢做出正確判斷基礎上,結合實際需求,實現多種技術路線的跨越式發展,形成我國水下通信技術的自主可控發展,為國家發展建設成為海洋強國提供強有力的支持。